高精地图
高精地图和自动驾驶

L3以下可以不用高精度地图,L3+必须要用到高精度地图。
高精地图不一定比传统地图精度更高,但包含信息更全面,或者实时性更强。
高精地图的特征
- 实时性
- 描述车道或者车道边界线等,包含了人能看到的能影响驾驶的全部信息。
高精地图与传统导航地图的区别示意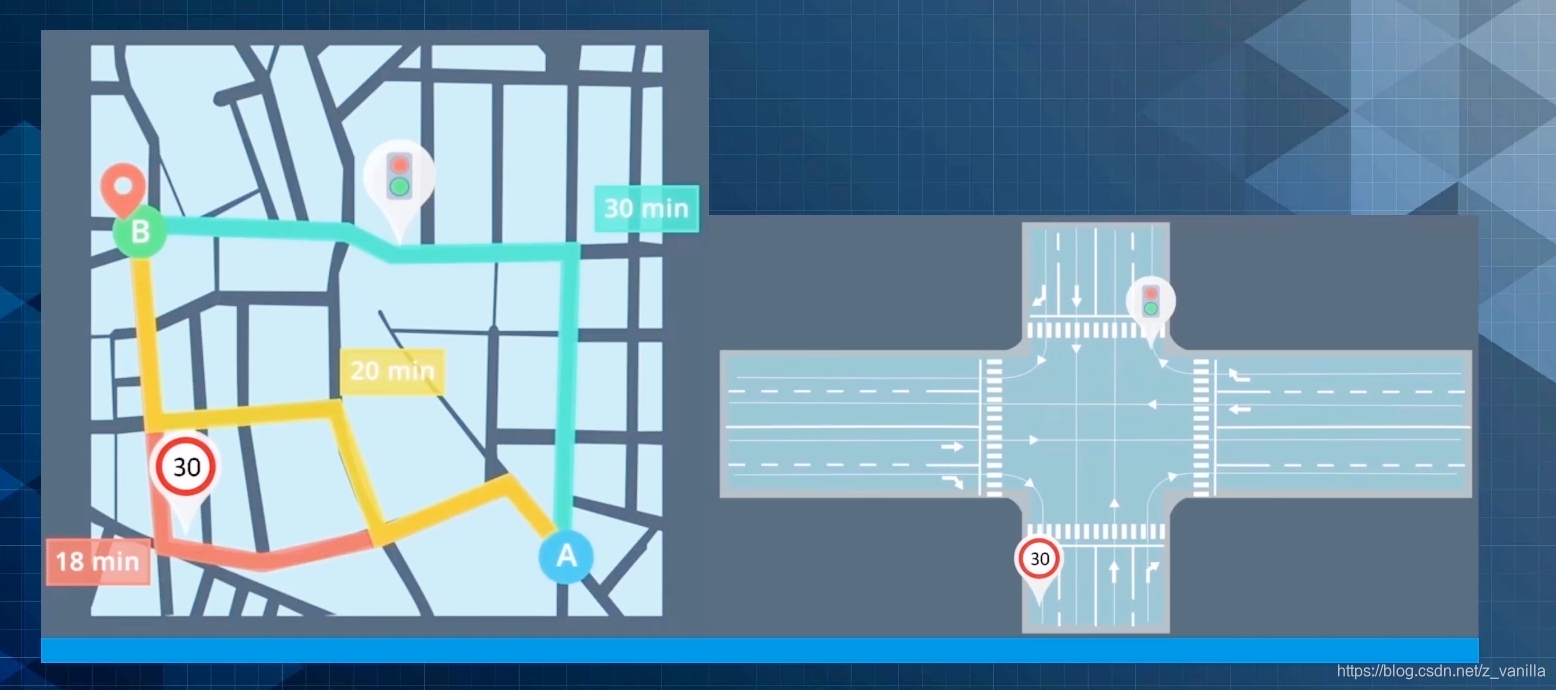
高精地图与其他模块的关系

定位
目前两种主流定位方法:点云定位、视觉定位。
比如,结合粒子滤波以及高精地图计算概率确认所在位置
感知
超距感知与隔障碍物感知、红绿灯感知
弥补感知传感器的局限性:距离的局限性(如激光雷达在一定距离之外点云稀疏,摄像头在恶劣环境下的情况);雷达穿透能力强,精度不高;激光雷达穿透能力弱,遇到雾霾等天气会有较大误差;遮挡情况
高精度地图的先验提高识别率,缩小检测范围。
规划预测决策
长距离规划(路由选择):类似于导航,主要针对于静态环境,但会考虑车道级别的规划。
短距离规划(轨迹选择):通过高精度地图决定短距离规划的目的地(车道)
预测:底层依赖于高精度地图,根据障碍物所在车道位置或者红绿灯等信息预测障碍物可能的运行轨迹。
安全
无人车的操作系统、控制系统、通信系统可能会被攻击、被干扰或者发生故障。
高精度地图提供了一个离线的标准,与实时探测到的进行匹配。
仿真系统
基于高精地图构建仿真系统,保证测试时候的场景和实际道路运行的差别不会很大。
高精度地图作用
- 静态感知,把人的经验传递给自动驾驶系统
- 弥补系统性缺陷,目前4G网络无法实现实时传输数据,云端计算
高精度地图的采集与生产
采集用的一些传感器
- GPS:通过观测卫星(四颗及以上)得到地球上的点位置
- IMU
- 轮速计:通过分析每个时间段里左右轮的总转数,可以得出车走了多远,但路面情况会影响结果
- 激光雷达
生产——计算模型
空间结构的三维重建
高度简化的计算模型
生产——视觉制图
采用纯视觉的制图模式。
- 基于激光雷达:摄像头与激光雷达融合使用,激光雷达准确但信息少,摄像头信息更多
- 基于视觉:硬件较强的可以实时监测实时生成
高精度地图的格式规范
- NDS
- OpenDRIVE
- NDS支持局部更新,提供一些描述功能,较为复杂,但信息很全面。
- 地图分块封装地图数据。
- OpenDRIVE中,道路被切分成多个section,车道线变化、虚实线变化、道路属性变化都是其划分原则。规定了参考车道,基于参考车道向左向右的车道ID分别递加递减。规定了路口概念,包含红色线(虚拟路),用于连接可通行方向。
- tracking坐标系:S相对于参考车道的起点的纵向偏移量;T基于参考车道的横向偏移量。所有车道线的描述都基于这个参考车道偏移描述。
业界的高精地图产品
- HERE:基于云端的服务,精度高,更新快。
- HERE采集地图的流程:建立一个Base Map(利用激光雷达结合图像);众包更新;众包采集之后与Base Map匹配;云端Map Learing;云端将更新之后的地图传播到车端。
- 数据采集不能通过网络传输,高精的技术数据不允许在网络上传输。
- 点云分割,点云特征提取,点云的SLAM尚待完善。
- HERE地图的表述:
- 道路车道层 Road&Lane Model Layer:最底层,道路车道边界的虚线(没有车道线的情况下也会提供虚拟车道线)实线,道路限速,道路标牌等
- 定位层 Localization Model Layer:基于点云的和基于图像的定位方法都需要提取特征,该层用于表述用于定位的信息
- 动态信息层 Activity Layer:描述路上一些动态事件,对实时性要求较高
- 驾驶习惯层 Analytics Layer:收集驾驶员的驾驶习惯信息,使自动驾驶汽车开的更像人。把人的经验抽象为数据,把这种数据转化为自动驾驶汽车的驾驶准则
- MobileEye(下简称ME)技术体系分为三个层次:感知、制图、驾驶策略习惯
- ME在感知层面更多基于视觉图像层面。
- ME使用用REM的众包视觉制图;利用强化学习训练驾驶策略。
- ME的制图:提出道路经验管理,即一个众包系统,在终端上实时收集数据上传云端,更新后下发车端。
- 基于视觉方案的问题:对车道线的检测没有那么连续。
- Road Book 车端首先进行语义分析和几何形状提取,把信息压缩打包传输云端,减少传输带宽。
- Google Waymo
- GW更类似于一种栅格形式的高精地图,区别于传统的矢量数据地图。
- GW也是基于激光雷达加视觉融合的,但重新设计的激光雷达的感知距离很远
- TomTom能做到在云端的实时更新
- Road DNA定位方案:把三维的点云通过一定技术构建一个可对比可识别的feature
Apollo地图采集方案
硬件方案
- 64线激光雷达采集道路路面,16线激光雷达斜向上装检测高处红绿灯、标牌信息。
- GPS采用RTK
- 长短焦相机
- 有监控传感器状态的部分,确保各个传感器在工作时情况良好
- 有一键式采集方案,在一键采集之前要确认传感器是正常工作的,传感器是已经被标定过的(不同厂家对同一个地面的反射值不同)。
- 在采集过程中,双向车道要采集3~5遍
- 一次采集行为会把所有结果(点云、车辆的标定参数、定位结果、pose结果等)都放进一个包
- 采集结束之后把数据传输给平台制图
Apollo地图生产技术

- 数据处理:数据分为点云和图像两类,因为高精度要求,所以制图以点云为主。
(1)点云拼接:采集过程中信号可能不稳定(RTK在遮挡情况下会出现不稳定现象),通过SLAM等对pose做优化,优化之后对点云信息做拼接得到完整的点云信息。点云信息被压扁得到定位地图图像、反射地图图像。反射地图可以做一些标注。
(2)点云图像处理后得到一个高精度图像,基于图像可以做精确的车道线识别,获得车道线的形状特征。但仍需要道路虚实线、黄白线、路口标识等信息,这时候需要元素识别。 - 元素识别
(1)车的自动化程度不够 ,无法解决道路上没有车道线的部分以及无法理解逻辑信息(比如停止线和红绿灯的关联关系) - 人工验证:车道线识别是否正确,补充关联处理。比如路口虚拟线的处理,这种虚拟线的处理依赖于半自动化的处理。
- 基于深度学习的地图要素识别有两个层面:
(1)是否能基于点云分割,从点云里提取特征。
(2)尝试从点云中提取车道线、灯杆、红绿灯等。 - 定位地图类似于整齐排列的小格子,存储了坐标信息和反射强度信息等,用于点云定位。
- 高精地图
- 路径规划地图主要用于车道级别规划的
- 仿真地图用于基于高精地图的仿真
Apollo高精地图
高精地图的数据元素

- 道路本身分为道路级别(道路边界,是强约束)和车道级别(左右边界)
- 路口边界对感知做过滤

1.left sample中心线到两个(车道)边界的距离;left/right road sample车道中心线到道路物理边界的距离
2.在车道变化的地方也做一个junction,可以给感知做一个约束
3. 高精地图用UTM坐标系、WGS84、Tracking(ST)
4. WGS84本身是一套全球经纬度。把整个地球想象成一个椭球,地面的高度是相对于椭球面的偏移,高低对应正负。
5. Apollo OpenDrive规范(与标准OpenDrive的差异):
元素做了归类,road、junction、地面所有的标识都是object、标牌都是signal,用overlap关联。
(1)标准是通过参考车道偏移量计算,Apollo是采用绝对坐标点序列描述边界形状,不采用方程的方式。好处是对下游的计算友好,不用再做点的采样。
(2)标准基于偏移量的计算在道路急转弯情况会出现道路上的毛刺,可能导致无人车猛打方向盘造成危险。
(3)扩展了禁停区、人行横道、减速带等元素。
(4)新增了junction和junction之间的关联关系。(5)增加了车道中心线到真实道路边界的距离、停止线和红绿灯的关系。
6. overlap:用来描述两个元素的空间关系。两个车道在空间上有重叠,则这两个车道有overlap。能进入到路边停车位的车道与停车位之间也存在overlap。下游的控制决策模块拿到地图之后,知道哪个车道进入停车位。
7. HDMAP引擎:从HDMAP中提取相关元素给下游用。通过ID检索或者空间位置(点或半径)检索。
8. 高精地图属于国家机密,不可以任何人都来做测绘。
9. 国内地图的数据加偏,对发布的地图数据都做加密;高程、曲率、坡度不允许在地图里表述;