PointNet是斯坦福大学发表在2017年CVPR上的一篇处理点云数据的论文。相较于之前其他处理点云数据的论文,其最大的不同是,对于点云数据,会直接进行处理,而非将点云数据进行格式化处理,从而避免了将点云数据格式化后,产生的unnecessarily voluminous以及像素点失真的问题。从这一点上来说,PointNet具有极其重要的意义。
从传统思路来讲,通过将点云数据转换成3D像素数据后,可以将3D像素数据像处理2维图像一样,进行卷积,权值共享等,而显而易见,对于无序的一些点的集合,是无法直接像和处理2D数据一样进行处理,在原文中,当直接使用点云数据不加处理时,作者提出了以下3个可能产生的问题,以及主要就这3个问题,进行的网络结构的设计以及相关的证明和实验:
1、输入无序性问题
从数据结构的角度来讲,点云数据知识一组无序的向量集合,若不考虑其他诸如颜色等因素,只考虑点的坐标,则点云数据只是一组n * 3的点集合。那么当对这n个点进行不同顺序的读入时,无论是图像分类抑或是部分分割,都必须输出相同的结果,在2D图像中,因为点的位置是固定的,所以不存在这样的问题,但是在点云数据中,点的输入组合中共有n!种,所以必须进行处理。
在论文中,处理的方式也比较简单,使用了最大池化,在对n个点进行卷积等操作后,生成n * 1024维的矩阵,1024维的1024个整体特征,对于每个维度,求其最大值,即解决了输入无序性的问题。此处可举例有max(a,b,c,d,e,f,g) = max (a,d,b,e,c,f,g) = ...
在论文的4.3部分,作者就使用最大池化进行证明,当特征维数足够大时,最大池化可以对模拟论文中所述的任意对称函数f,同时在此基础上论述了模型的稳定性。对于任意数据集S,Cs表示critical set,Ns表示upper-bound set,即对于相同全局特征f(s),所可能的最大点云集,此时有f(Ns) = f(S), 故而当添加的点属于Ns - S时,对于整体点云特征并无影响,故而满足稳重所述的robust to small pertubation of input points。此处其实与svm中的支持向量有点类似,以及凸包中,被包住的点。最终作者的结论是网络学习到了概括形状的关键点,即点云的骨架。
2、点与点之间的相关性
在分类问题中,此问题其实不是特别重要,在分类中,只要处理出全局特征,通过对全局特征进行mlp或者用svm分类等,即可得到最终答案,但是在part segmentation 以及 scene semantic parsing中,此问题就显得极其重要。
论文中进行处理时,通过将提取出的全局特征以及点特征结合,得到n * 1088(64 + 1024)的特征矩阵,然后在此矩阵的居处上,重新提取每个点的特征,得到包含局部及全局特征的点信息。
3、旋转不变性
对于一个3维图像,当我们进行例如旋转、上移等操作时,不论是目标分类还是部分分割,都应保证其结果不变。
而解决此问题的方法是通过添加一个T-Net,对原始点矩阵进行仿射变换。相当于在数据预处理阶段直接进行处理,保证其后的结果不变性。训练的T-Net是数据依赖的。同时,在其后的点的特征空间,作者也同样加了一个T-Net进行处理,但相较于前一个3 * 3变换矩阵,此变换矩阵为64 * 64 = 4096,由于变换矩阵过大,通过添加正则项,使变换矩阵近似于正交矩阵,此时所需要的参数将大大减少。
最后对图中的网络结构结合具体代码进行分析:
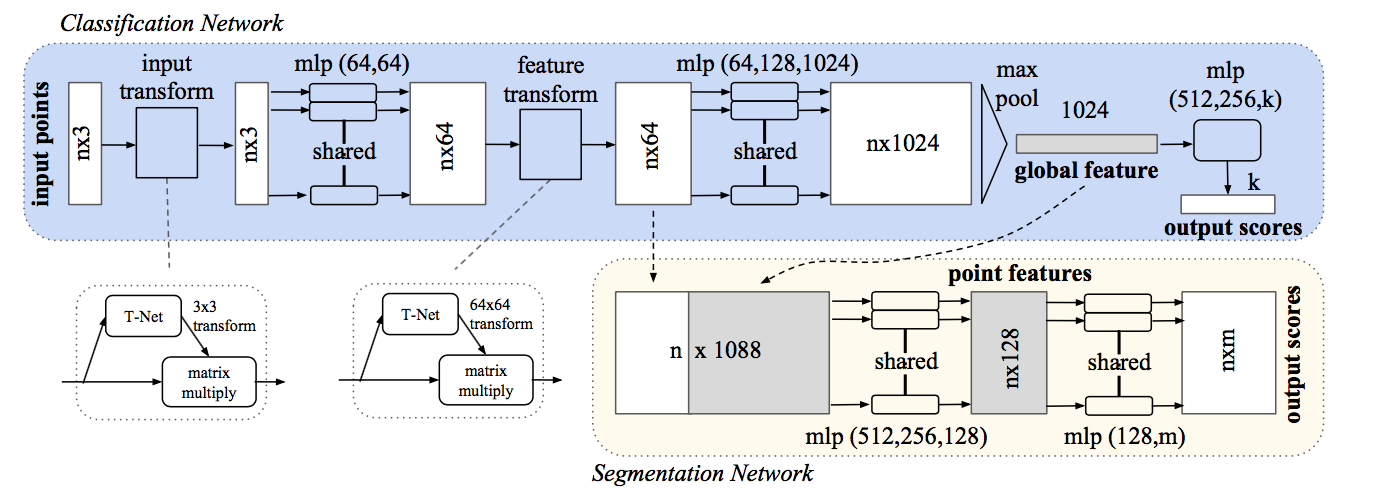
在输入点云数据后,首先进行T-Net进行仿射变换,具体表现为乘以3*3的转换矩阵,其后通过卷积层进行特征提取,根据代码得知,mlp(64,64)的两层卷积层的卷积核数量都为64,其中第一层卷积的卷积核大小为1 * 3,第二层为1 * 1的核。而后进行相同的feature transform,在下一个mlp(64,128,1024)中,卷积核的大小都为1 * 1。在池化层后,分别连接三个全连接层,输出节点个数依次为512、256、k,最终使用softmax函数得到结果。