V 估计器初始化
紧耦合单目VIO是一个高度非线性的系统.由于单目相机无法直接观测到尺度,因此,如果没有良好的初始值,很难直接将这两种测量结果融合在一起。人们可以假设一个静止的初始条件来启动单目vins估计器。然而,这种假设是不合适的,因为在实际应用中经常会遇到运动下的初始化.当IMU测量结果被大偏置破坏时,情况就变得更加复杂了。事实上,初始化通常是单目vins最脆弱的步骤。需要一个鲁棒的初始化过程来确保系统的适用性。
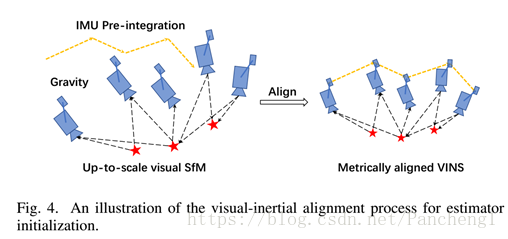
我们采用松耦合的传感器融合方法得到初始值.我们发现,纯视觉的SLAM,或SfM,具有良好的初始化性质。在大多数情况下,视觉系统可以通过从相对运动方法(如八点[32]或五点算法[33]或估计齐次矩阵)中导出初始值来引导自己。通过将度量IMU预积分与纯视觉SfM结果相匹配,我们可以粗略地恢复尺度、重力、速度,甚至偏置。这足以引导非线性单目vins估计器,如图4所示。
与在初始阶段同时估计陀螺仪和加速度计偏置的[17]相比,我们在初始阶段选择忽略加速度计偏置项。加速度计偏置与重力耦合,由于重力向量相对于平台动力学的大量级,以及初始阶段相对较短,这些偏置项很难被观测到。我们以前的工作对加速度计偏置标定进行了详细的分析。
A.纯视觉SFM滑窗
初始化过程开始于一个纯视觉的SfM来估计一个高比例相机的姿势和特征位置的图。
我们保持了一个帧的滑动窗口来限制计算复杂度。首先,我们检查了最新帧与之前所有帧之间的特征对应。如果我们能找到稳定的特征跟踪(超过30个跟踪特征)和足够的视差(20个以上的旋转补偿像素)在滑动窗口中的最新帧和任何其他帧之间,我们使用五点法[33]恢复相对旋转和这两个帧之间的尺度平移。否则,我们会将最新的帧保存在窗口中,并等待新的帧。如果五点法成功的话,我们可以任意设置尺度,并对这两个帧中观察到的所有特征进行三角化。基于这些三角化特征,采用(Pnp)[35]方法来估计窗口中所有其他帧的姿态。最后,应用全局光束平差[36]将所有特征观测的总重投影误差降到最小。由于我们还没有任何世界坐标系的信息,我们设置了第一个相机帧作为参考帧的SfM。所有帧的姿态
和特征位置表示相对于
。假设摄像机和IMU之间有一个粗糙测度的外部参数
,我们可以将姿态从C帧转换到B帧(IMU)。

其中s是匹配视觉结构与米制尺度的尺度参数,解决这个缩放参数是实现成功初始化的关键。推导过程:不过有一个疑问就是和
的关系是什么是逆的关系吗?

B. 视觉惯性对齐
1)陀螺仪偏置标定:考虑窗口连续两帧和
,我们从视觉sfM中得到旋转
和
,以及通过IMU预积分得到的相对约束
。我们将IMU预积分项线性化,使陀螺仪偏置最小,并将下列代价函数降到最小:

其中代表窗口中的所有帧。利用第四部分导出的偏置雅可比,给出了
对陀螺仪偏置的一阶近似。这样,我们得到了陀螺仪偏置
的初始校准。然后我们用新的陀螺仪偏置重新传播所有的imu预积分项

其中式(15)中陀螺仪的误差有两部分组成分别为:测量噪声和陀螺仪偏置,而视觉的误差就只有观测噪声,忽略噪声的话(因为很小)两者差值的绝对值是陀螺仪偏置,将整个滑动窗口的所有的旋转做差构成了一个最小化误差模型。由于四元数最小的值为,因此有:


只考虑虚步的话,得到上式子。其中: 表示相机从
到
的相对旋转,
表示陀螺仪从
到
的相对旋转。然后取最小二乘,当然也可以使用SVD分解等方法求解,得到了陀螺仪偏置
的初始校准。
2)速度、重力向量和米制尺度初始化:在陀螺仪偏置初始化后,我们继续初始化导航的其他基本状态,即速度、重力向量和度量尺度:

其中,当取第k帧图像时,是B帧中的速度,
是
帧中的重力向量,s将单目SfM缩放为度量单位。
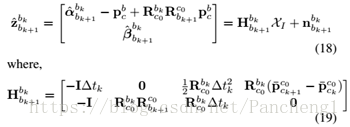
考虑窗口中两个连续的帧和
,那么(5)可以写成:

推导过程:

我们可以将(14)和(17)合并成以下线性测量模型:
可以看出,是从上尺度单目视觉
中得到的,
是两个连续帧之间的时间间隔。通过求解这个线性最小二乘问题:

我们可以得到窗口中每一帧的物体帧速度,视觉参照系中的重力向量,以及尺度参数。
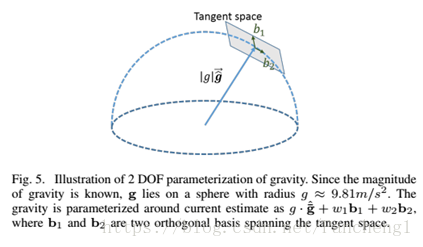
3)重力细化:通过约束量级,可以对原线性初始化步骤得到的重力向量进行细化。在大多数情况下,重力向量的大小是已知的。这导致重力向量只剩2自由度。因此,我们在其切线空间上用两个变量重新参数化重力。参数化将重力向量表示为 ,其中
是已知的重力大小,
是表示重力方向的单位向量,
和
是跨越切平面的两个正交基,如图5所示,
和
分别是
和
的对应位移。通过算法1的交叉乘积运算,可以找到一组
,
。然后用
代替(17)中的g,并与其它状态变量一起求解
和
。此过程迭代到
收敛为止。

4)完成初始化:经过对重力向量的细化,通过将重力旋转到z轴上,得到世界帧与摄像机帧之间的旋转
。然后我们将所有变量从参考框架
旋转到世界框架
。本体坐标系下的B帧的速度也将被旋转到世界框架。视觉SfM的转换组件将被缩放为公制单位。此时,初始化过程已经完成,所有这些度量值都将被输入到一个紧耦合的单目VIO中。

参考:
1.https://blog.csdn.nt/weixin_42905141/article/details/102782800