(1)打开qt_ros:
$ qtcreator-ros(2)采用前面导入ROS工程的方法(导入方法1和导入方法2)导入一个工程;
(3)在该工程中添加beginner_tutorials包(参照qt_ros的初步使用);
(4)手动在beginner_tutorials文件夹下新建一个launch文件夹,与src文件夹并列,如下图所示:

(5)在qt_ros界面下,选中beginner_tutorials下的launch文件夹(如果launch文件夹没有显示出来可以重启下qt_ros),右键点击Add New...,在弹出的框中选择ROS->Basic launch file,点击choose,如下图所示:

(6)Name处填写chatter(则会生成一个chatter.launch文件),Path这一栏点保持不变,如下图所示:

(7)点击Next和Finish,可以看到在launch文件夹下生成了一个chatter.launch文件;
(8)打开chatter.launch文件,添加如下代码:
<launch>
<node pkg="beginner_tutorials" name="talker" type="talker" />
</launch>这个代码的意思和rosrun beginner_tutorials talker一致,如果想把talker节点发布的信息打印到屏幕上,可以添加可选参数output="screen"(直接添加在type="talker"后面即可),即:
<launch>
<node pkg="beginner_tutorials" name="talker" type="talker" output="screen" />
</launch>(9)切换到Projects界面下,选中Build & Run下面的Desktop/Run,即Run Settings,如下图所示:

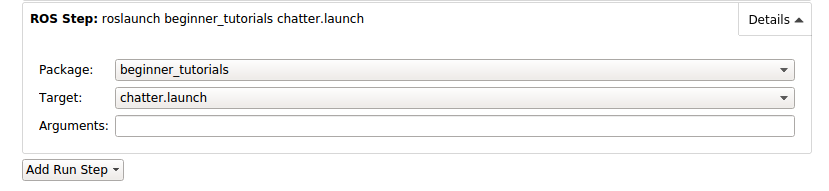
(10)选择Add Run Step下面的ROS Launch Step,在Arguments一栏填写beginner_tutorials chatter.launch,前面为包名,后面为launch文件名;或者直接在Package和Target下分别找到包名和launch文件名,如下图所示:
(11)选中catkin_ws右键点击Run运行(或者左下角的绿色三角![]() ),便可以在ROS Terminals下看到talker节点运行的结果:
),便可以在ROS Terminals下看到talker节点运行的结果:

启动launch文件后,节点talker相当于启动了,这时候运行$ rosrun beginner_tutorials listener便可以收到talker节点发过来的消息。
PS:这里并不需要另外开启$ roscore终端(这是为啥?)
(12)当然如果不另外开启终端运行listener节点,查看listener节点的接收情况,则需要修改chatter.launch文件,如下:
<launch>
<node pkg="beginner_tutorials" name="talker" type="talker" output="screen" />
<node pkg="beginner_tutorials" name="listener" type="listener" output="screen" />
</launch>运行之后结果如下:
