Datawhale 计算机视觉基础-图像处理(下)- Task01 Harris特征点检测器-兴趣点检测
1. 基础知识
1.1角点的介绍
在图像处理领域中,特征点又被称为兴趣点或者角点,它通常具有旋转不变性和光照不变性和视角不变性等优点,是图像的重要特征之一,常被应用到目标匹配、目标跟踪、三维重建等应用中。
点特征主要指图像中的明显点,如突出的角点、边缘端点、极值点等等,用于点特征提取的算子称为兴趣点提取(检测)算子,常用的有Harris角点检测、FAST特征检测、SIFT特征检测及SURF特征检测。
那么如何进行判断呢?
可以使用滑动窗口在图像中滑动:
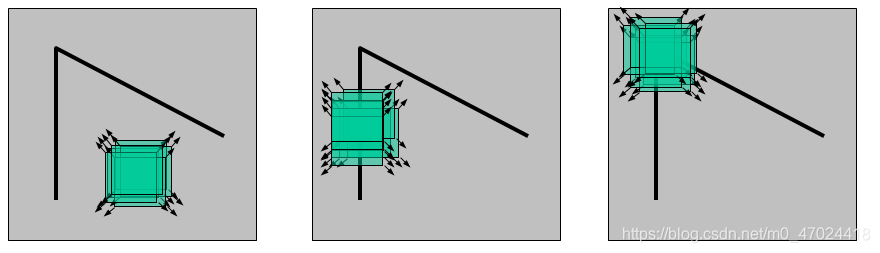
(1)如果沿着各个方向移动,窗口内像素值均没有太大变化,则它是平坦区域。
(2)如果沿着水平方向移动(梯度方向),像素值会发生跳变;沿着边缘移动(平行于边缘) ,像素值不会发生变化;则它表示一个边缘特征(Edges)。
(3)如果无论朝哪个方向移动,像素值都会发生很大变化,则它就是一个角。
下图中由左到右分别代表上述三种情况:
同时,角点也有多种类型,如下图所示:

2.Harris角点检测算法原理
2.1 算法核心思想
算法的核心是利用局部窗口在图像上进行移动,判断灰度是否发生较大的变化。如果窗口内的灰度值(在梯度图上)都有较大的变化,那么这个窗口所在区域就存在角点。
这样就可以将 Harris 角点检测算法分为以下三步:
当窗口(局部区域)同时向 x (水平)和 y(垂直) 两个方向移动时,计算窗口内部的像素值变化量
;
对于每个窗口,都计算其对应的一个角点响应函数
;
然后对该函数进行阈值处理,如果
,表示该窗口对应一个角点特征。
2.2 算法原理
第一步:是通过建立数学模型,确定哪些窗口会引起较大的灰度值变化。
第二步:是找到会引起较大的灰度值变化的那些窗口。
第三步:将这个窗口所在的区域划分为平面、边缘或角点
具体公式推理过程参考:https://github.com/datawhalechina/team-learning/blob/master/03%20%E8%AE%A1%E7%AE%97%E6%9C%BA%E8%A7%86%E8%A7%89/%E8%AE%A1%E7%AE%97%E6%9C%BA%E8%A7%86%E8%A7%89%E5%9F%BA%E7%A1%80%EF%BC%9A%E5%9B%BE%E5%83%8F%E5%A4%84%E7%90%86%EF%BC%88%E4%B8%8B%EF%BC%89/Task01%20Harris%E7%89%B9%E5%BE%81%E7%82%B9%E6%A3%80%E6%B5%8B.md
3.OpenCV实现
3.1 API
在opencv中有提供实现 Harris 角点检测的函数 cv2.cornerHarris,我们直接调用的就可以,非常方便。
函数原型:cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]])
对于每一个像素 (x,y),在 (blockSize x blockSize) 邻域内,计算梯度图的协方差矩阵 ,然后通过上面第二步中的角点响应函数得到结果图。图像中的角点可以为该结果图的局部最大值。
即可以得到输出图中的局部最大值,这些值就对应图像中的角点。
参数解释:
src - 输入灰度图像,float32类型
blockSize - 用于角点检测的邻域大小,就是上面提到的窗口的尺寸
ksize - 用于计算梯度图的Sobel算子的尺寸
k - 用于计算角点响应函数的参数k,取值范围常在0.04~0.06之间
3.2 代码示例
import cv2 as cv
from matplotlib import pyplot as plt
import numpy as np
# detector parameters
block_size = 3
sobel_size = 3
k = 0.06
image = cv.imread(r'D:\paper\shijue2\03.jpg')
print(image.shape)
height = image.shape[0]
width = image.shape[1]
channels = image.shape[2]
print("width: %s height: %s channels: %s" % (width, height, channels))
gray_img = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
# modify the data type setting to 32-bit floating point
gray_img = np.float32(gray_img)
# detect the corners with appropriate values as input parameters
corners_img = cv.cornerHarris(gray_img, block_size, sobel_size, k)
# result is dilated for marking the corners, not necessary
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))
dst = cv.dilate(corners_img, kernel)
# Threshold for an optimal value, marking the corners in Green
# image[corners_img>0.01*corners_img.max()] = [0,0,255]
for r in range(height):
for c in range(width):
pix = dst[r, c]
if pix > 0.05 * dst.max():
cv.circle(image, (c, r), 5, (0, 0, 255), 0)
image = cv.cvtColor(image, cv.COLOR_BGR2RGB)
plt.imshow(image)
plt.show()
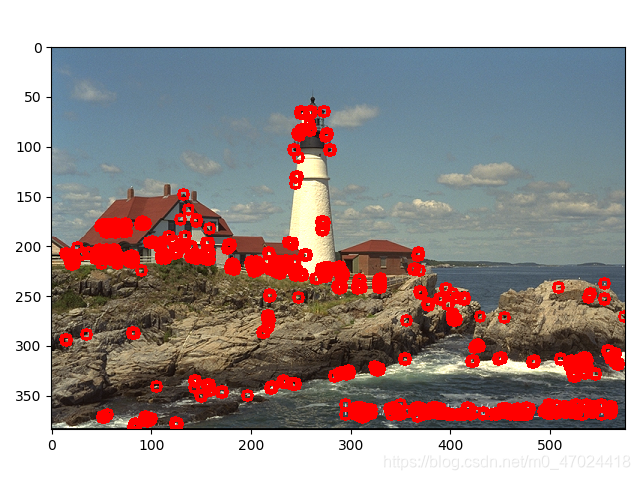
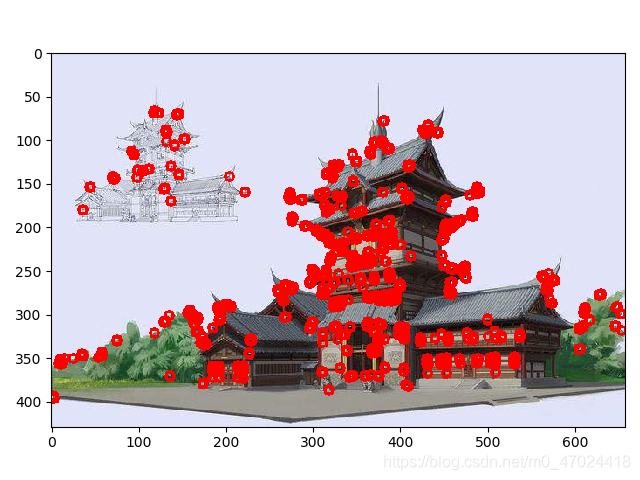
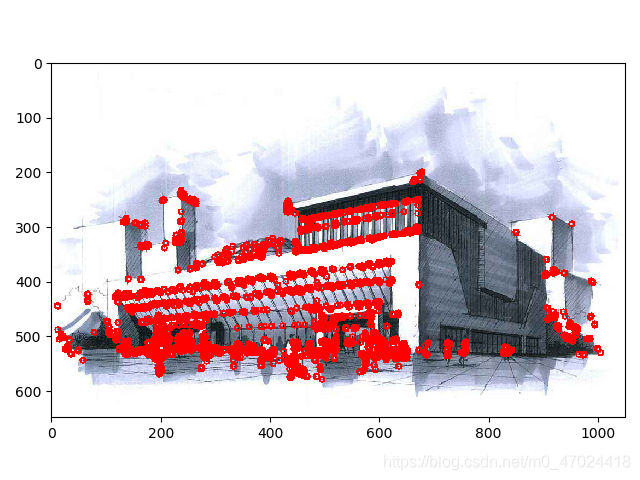
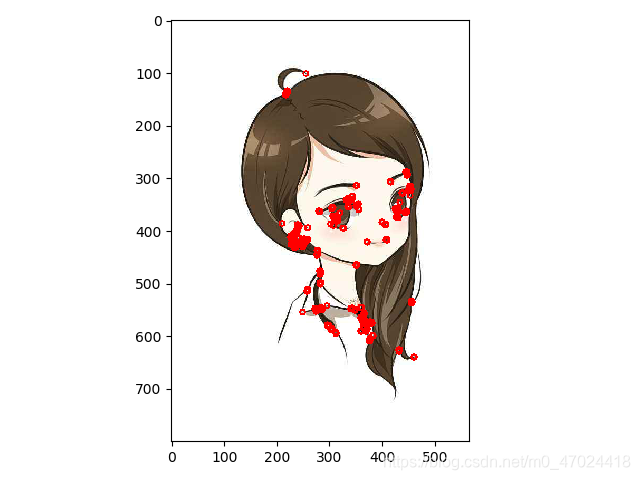
我对四张图进行读取角点,结果分别如下: