教程 https://zhuanlan.zhihu.com/p/74597564
目录
一 图像变换与平面坐标系的关系
二 平面坐标系与齐次坐标系
三 单应性变换

一 图像变换与平面坐标系的关系
- 旋转:

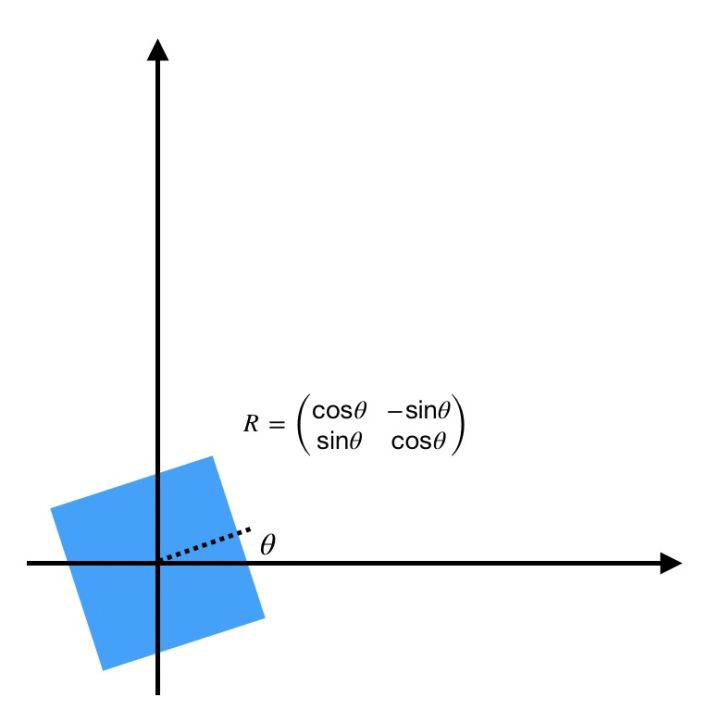
写成矩阵乘法形式:

- 平移:


但是现在遇到困难了,平移无法写成和上面旋转一样的矩阵乘法形式。所以引入齐次坐标 ,再写成矩阵形式:

其中 表示单位矩阵,而
表示平移向量。
那么就可以把把旋转和平移统一写在一个矩阵乘法公式中,即刚体变换:

而旋转矩阵 是正交矩阵(
)。

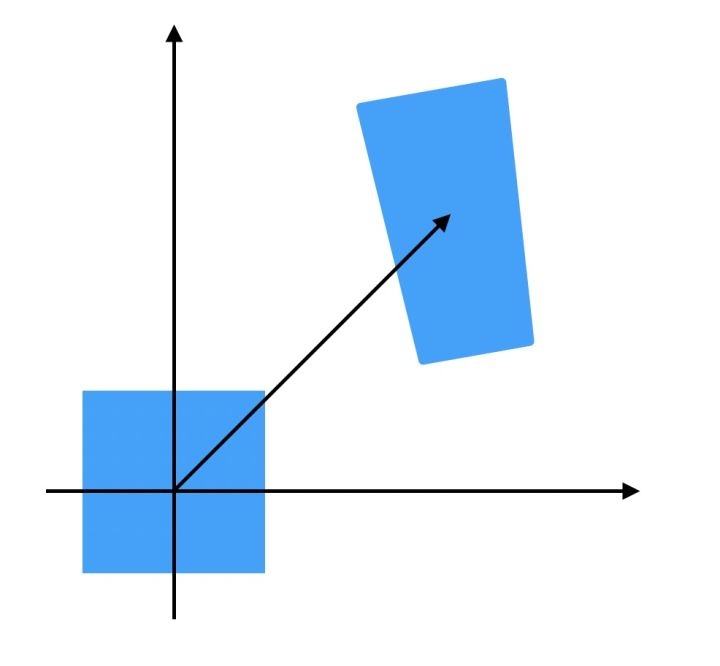
刚体变换:旋转+平移(正方形-正方形)
作用:z轴距离不变 x y 和原来相等
仿射变换
作用:z轴距离不变 x y 各自被比例拉伸

其中 可以是任意2x2矩阵(与
一定是正交矩阵不同)。

仿射变换(正方形-平行四边形)
可以看到,相比刚体变换(旋转和平移),仿射变换除了改变目标位置,还改变目标的形状,但是会保持物体的“平直性”。
不同 和
矩阵对应的各种基本仿射变换:
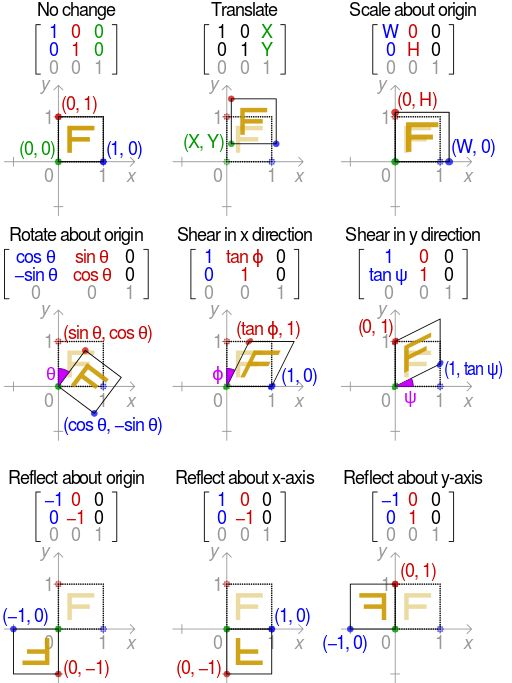
仿射变换(正方形-平行四边形)
可以看到,相比刚体变换(旋转和平移),仿射变换除了改变目标位置,还改变目标的形状,但是会保持物体的“平直性”。
不同 和
矩阵对应的各种基本仿射变换:

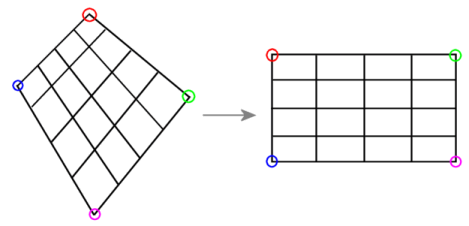
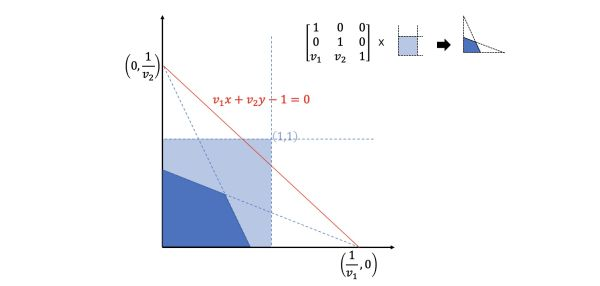
- 投影变换(单应性变换)
投影变换(单应性变换)
作用:z轴距离被拉伸 x y 被比例拉伸 z

投影变换(正方形-任意四边形)
总结一下:
- 刚体变换:平移+旋转,只改变物体位置,不改变物体形状 x y z等于原来
- 仿射变换:改变物体位置和形状,但是保持“平直性” z不变 x y 被比例拉伸
- 投影变换:彻底改变物体位置和形状 z x y 都被比例拉伸

注:上图“投影变换”应该是“任意四边形”
我们来看看完整投影变换矩阵各个参数的物理含义:

其中 代表仿射变换参数
代表平移变换参数
表示一种“变换后边缘交点“关系,如:
至于 则是一个与
相关的缩放因子。
一般情况下都会通过归一化使得 (原因见下文)。
二 平面坐标系与齐次坐标系
问题来了,齐次坐标到底是什么?
齐次坐标系 与常见的三维空间坐标系
不同,只有两个自由度:
而 (其中
)对应坐标
和
的缩放尺度。当
时:
特别的当 时,对应无穷远:
三 单应性变换
- 单应性是什么?
此处不经证明的给出:同一个 [无镜头畸变] 的相机从不同位置拍摄 [同一平面物体] 的图像之间存在单应性,可以用 [投影变换] 表示 。
注意:单应性成立是有条件的!

简单说就是:
其中 是Left view图片上的点,
是Right view图片上对应的点。
- 那么这个
单应性矩阵如何求解呢?
更一般的,每一组匹配点 有
由平面坐标与齐次坐标对应关系 ,上式可以表示为:
进一步变换为:
写成矩阵 形式:
也就是说一组匹配点 可以获得2组方程。
- 单应性矩阵8自由度
注意观察:单应性矩阵 与
其实完全一样(其中
),例如:
即点 无论经过
还是
映射,变化后都是
。
如果使 ,那么有:
所以单应性矩阵 虽然有9个未知数,但只有8个自由度。
在求 时一般添加约束
(也有用
约束),所以还有
共8个未知数。由于一组匹配点
对应2组方程,那么只需要
组不共线的匹配点即可求解
的唯一解。

可以看到:
- 红框所在平面上内容基本对齐,但受到镜头畸变影响无法完全对齐;
- 平面外背景物体不符合单应性原理,偏离很大,完全无法对齐。
- 传统方法估计单应性矩阵
一般传统方法估计单应性变换矩阵,需要经过以下4个步骤:
- 提取每张图SIFT/SURF/FAST/ORB等特征点
- 提取每个特征点对应的描述子
- 通过匹配特征点描述子,找到两张图中匹配的特征点对(这里可能存在错误匹配)
- 使用RANSAC算法剔除错误匹配
- 求解方程组,计算Homograph单应性变换矩阵