Matlab:图像平移算法的原理实现,缺陷分析及优化
文章目录
1.怎么样确定平移之后新的图片的模板呢?
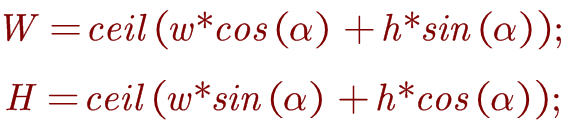
这里,我们主要通过转换公式来实现:
W,H代表平移后的图片模块大小;而ceil()代表上取整,w,h代表原来图片的大小,Apha为旋转角度。经代码实现后,我们可以得到新的图片模板:
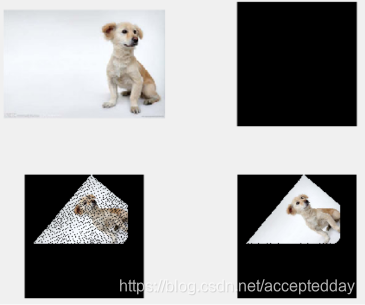
img=imread('pet.jpg'); subplot(2,2,1),imshow(img); [h,w,k]=size(img); a=80; a=a*pi/180; w_new=ceil(w*cos(a)+h*sin(a)); h_new=ceil(w*sin(a)+h*cos(a)); img_new=zeros(h_new,w_new,k); %旋转 subplot(2,2,2),imshow(img_new);如图所示:

2.图像中的坐标平移转换是如何实现的呢?
在实现平移算法之前,我们首先来了解平移算法的背景知识:
以逆时针旋转为例:
如图,旋转前的坐标为:
而旋转后的坐标为:
通过以上的计算,我们可以得到平移矩阵:
这个时候,如果你对图像处理有一定的了解的话,你会发现这里的坐标采用的是数学里面的笛卡尔坐标系,而并不是我们的图像的坐标系。所以,为了实现坐标的转换,我们首先得实现坐标系的统一。


那么我们如何将图像坐标系转换为笛卡尔坐标系(也就是我们熟悉的数学坐标系)呢?
坐标系平移:
设图像宽度为W,高度为H,通过坐标系原点之间的位置关系,我们不难发现,由坐标系Ⅰ平移到Ⅱ的变换矩阵为:
而其逆矩阵为:
而我们得到图像平移的设计思路如下:
- 将像素所在的图像坐标系转换为笛卡尔坐标系。
- 将笛卡尔坐标系下的像素进行平移变换。
- 将像素所在的笛卡尔坐标系转换为图像坐标系。
coordination_shift=[1 0 -0.5*w;0 -1 0.5*h;0 0 1];%坐标系转换转换矩阵 rotation=[cos(a) -sin(a) 0; sin(a) cos(a) 0;0 0 1];%旋转矩阵 shift_back=[1 0 0.5*w_new;0 -1 0.5*h_new; 0 0 1];%还原坐标系矩阵 for y=1:h for x=1:w xy_position=coordination_shift*[x;y;1];%将像素所在的图像坐标系转换为笛卡尔坐标系。 xy_rotation=rotation*xy_position;%将笛卡尔坐标系下的像素进行平移变换。 xy_new=round(shift_back*xy_rotation);%将像素所在的笛卡尔坐标系转换为图像坐标系。 img_new(xy_new(2),xy_new(1),:)=img(y,x,:); end end end subplot(2,2,3),imshow(uint8(img_new));



通过如上的算法及代码实现,我们可以得到基于图像平移算法的实现操作。
3.上述步骤实现的图像平移算法的缺陷及优化
问题一,当旋转角度过大时,无法实现图像平移?
原因分析:
当角度过大时,图像的像素位置经过笛卡尔坐标系下的旋转后,还原为图像坐标系后可能会发生越界情况,导致无法实现其平移。
解决方法:
当经过旋转后还原为图像坐标系的像素点发生越界情况后,舍弃这些像素点:
xy_new=round(shift_back*xy_rotation);%将像素所在的笛卡尔坐标系转换为图像坐标系。 if xy_new(2)>0&&xy_new(2)<h+1&&xy_new(1)>0&&xy_new(1)<w+1 img_new(xy_new(2),xy_new(1),:)=img(y,x,:);
问题二,经过平移后的图像内部会存在大量黑点?
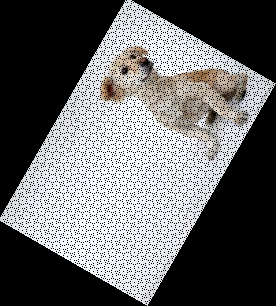
原因分析:
因为旋转的计算采用了sin(),cos()三角函数计算,经过ceil()变化后,像素点会存在精度上的缺失。
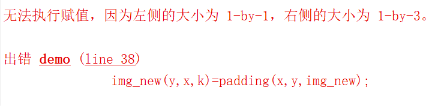
解决方法:
这里,我采用的是当像素缺失点(x,y)的“四领域”均存在像素值时,该点填充像素点(x+1,y)的像素值。
for y=2:h_new-1 for x=2:w_new-1%这里需要注意的是,防止越界。 if img_new(y,x,:)==0 img_new(y,x,:)=padding(x,y,img_new); end end end subplot(2,2,4),imshow(uint8(img_new)); %自定义判定函数 function [result]=padding(x,y,img) result=0; if img(y-1,x,:)>0 if img(y,x-1,:)>0 if img(y+1,x,:)>0 if img(y,x+1,:)>0 result=img(y,x+1,:); else result=0; end end end end end效果展示:
问题三,如何更好地优化填充算法呢?
其实经过上述的填充算法,当旋转角度小于90°时,填充的效果较好;当旋转角度大于90时,如何更好地优化填充算法呢?这是留给笔者和阅读这篇文章的读者值得思考的问题。(。◕ˇ∀ˇ◕)