一.简介
通过前面几节的介绍,大家可以直观的感受到:对于大部分机器学习模型,我们通常会将其转化为一个优化问题,由于模型通常较为复杂,难以直接计算其解析解,我们会采用迭代式的优化手段,用数学语言描述如下:
这里目标函数为\(f(x)\),当前优化变量为\(v^k\),目标即是找到一个\(v^k\)对当前的\(x^k\)进行更新,使得函数值尽可能的降低,如果目标函数一阶可微,对其作一阶泰勒展开即可得到如下梯度下降的更新公式:
二.梯度下降
对目标函数作一阶泰勒展开:
所以要使得\(f(x^k+v^k)<f(x^k)\)只需要使\(\triangledown f(x^k)^Tv^k<0\)即可,而如果取:
则一定能使\(\triangledown f(x^k)^Tv^k<0\),所以,我们就得到了梯度下降的更新公式:

这里\(\lambda_k\)一般可以设置一个较小的定值,或者初始设置一个定值并使其随着迭代次数增加而递减;另外更好的做法是利用一维搜索:\(min_{\lambda_k}f(x^k-\lambda_k\triangledown f(x^k))\)求一个最优的\(\lambda_k\),接下来我们想一下下面两个问题:
(1)梯度下降法一定能使得函数值下降吗?
(2)若它能使函数值下降,则它是最优的方向吗?
对于第一个问题,泰勒展开其实是有一个条件的,那就是\(v^k\rightarrow 0\),再结合上面的更新公式,如果\(\lambda_k\)取得过大时,我们是不能省略泰勒展开后面的项的,而且后面项的取值也不一定能保证小于0,所以有时我们设置的学习率\(\lambda_k\)较大时,函数值反而会上升。
所以,当\(v^k\)的取值大到不能忽略后面的项时,泰勒展开的二阶项取值就必须要考虑其中了,所以这时梯度下降法未必时最优的方向,接下来我们看下二阶展开的情况:
三.牛顿法
对其作二阶泰勒展开:
这里为了方便,记\(g_k=g(x^k)=\triangledown f(x^k),H_k=H(x^k)=\triangledown^2 f(x^k)\),\(H_k\)表示Hessian矩阵在\(x^k\)处的取值,Hessian矩阵的定义:
对于大部分机器学习模型,通常目标函数是凸的,所以\(H(x)\)半正定,即对于\(\forall v^k\),都有\({v^k}^TH_kv^k\geq0\),此时,\(f(x^k)+g_k^Tv^k+\frac{1}{2}{v^k}^TH_kv^k\)是关于\(v^k\)的凸二次规划问题,所以最优的\(v^k\)在其梯度为0处取得:
可以发现牛顿法对比梯度下降法,其实牛顿法是对梯度法的方向进行了一个改变\(H_k^{-1}\),所以,我们可以得到牛顿法的更新公式:
这里记\(p_k=-H_k^-1g_k\);
可以发现牛顿法的复杂有点高,因为要求解\(H_k^{-1}\),那么有没有方便一点的方法呢?比如构建一个矩阵去近似\(H_k\)或者\(H_k^{-1}\),这便是拟牛顿法的基本思想
四.拟牛顿条件
上面说到了利用一个矩阵去近似Hessian矩阵或者Hessian矩阵的逆,那么这个近似矩阵需要满足怎样的条件呢?我们还是从二阶泰勒展开出发,稍微变换一下:
两边对\(x^{k+1}\)求偏导可得:
这便是拟牛顿条件,为了方便,记\(y_k=g_{k+1}-g_k,\delta_k=x^{k+1}-x^k\),所以:
所以,拟牛顿法也要满足和\(H_k\)一样的性质:
(1)正定性;
(2)满足拟牛顿条件
接下来,简单证明一下如果满足性质(1):正定性,更新时可以满足函数值下降,假设\(G_k\)去近似\(H_k^{-1}\),所以:\(G_k\succ 0\),那么迭代公式为:
将其带入二阶泰勒展开式中:
通常\(\lambda_k^2<<\lambda_k\),所以可以省略第三项,而第二项由于\(G_k\succ 0\),所以\(-\lambda_kg_k^TG_kg_k< 0\),所以\(f(x^{k+1})<f(x^k)\)
五.DFP算法
DFP算法便是利用\(G_k\)近似\(H_k^{-1}\)的一种算法,它的构造很tricky,它假设每一步迭代中矩阵\(G_{k+1}\)是由\(G_k\)加上两个附加项构成的,即:
这里\(P_k,Q_k\)是待定项,由于需要满足拟牛顿条件,所以:
这里做一个tricky的假设:
这样的\(P_k,Q_k\)不难找到:
所以,矩阵\(G_{k+1}\)的迭代公式:
可以证明,只要初始矩阵\(G_0\)正定对称,则迭代过程中的每个矩阵\(G_k\)均正定对称,接下来对其进行代码实现:
import numpy as np
"""
DPF拟牛顿法,封装到ml_models.optimization模块,与梯度下降法配合使用
"""
class DFP(object):
def __init__(self, x0, g0):
"""
:param x0: 初始的x
:param g0: 初始x对应的梯度
"""
self.x0 = x0
self.g0 = g0
# 初始化G0
self.G0 = np.eye(len(x0))
def update_quasi_newton_matrix(self, x1, g1):
"""
更新拟牛顿矩阵
:param x1:
:param g1:
:return:
"""
# 进行一步更新
y0 = g1 - self.g0
delta0 = x1 - self.x0
self.G0 = self.G0 + delta0.dot(delta0.T) / delta0.T.dot(y0)[0][0] - self.G0.dot(y0).dot(y0.T).dot(self.G0) / y0.T.dot(
self.G0).dot(y0)[0][0]
def adjust_gradient(self, gradient):
"""
对原始的梯度做调整
:param gradient:
:return:
"""
return self.G0.dot(gradient)
应用到LogisticRegression
我们试一试将DFP算法应用到LogisticRegression,修改的地方如下:
fit函数追加如下的一个判断:
elif self.solver == 'dfp':
self.dfp = None
self._fit_sgd(x, y)
_fit_sgd函数中,在梯度更新前做如下调整:
if self.solver == 'dfp':
if self.dfp is None:
self.dfp = optimization.DFP(x0=self.w, g0=dw)
else:
# 更新一次拟牛顿矩阵
self.dfp.update_quasi_newton_matrix(self.w, dw)
# 调整梯度方向
dw = self.dfp.adjust_gradient(dw)
"""
梯度下降和DFP做一下对比
"""
from sklearn.datasets import make_classification
import matplotlib.pyplot as plt
%matplotlib inline
data, target = make_classification(n_samples=200, n_features=2, n_classes=2, n_informative=1, n_redundant=0,
n_repeated=0, n_clusters_per_class=1)
target = target.reshape(200, 1)
import os
os.chdir('../')
from ml_models.linear_model import LogisticRegression
sgd_model = LogisticRegression(epochs=50)
sgd_model.fit(data, target)
dfp_model = LogisticRegression(solver='dfp',epochs=50)
dfp_model.fit(data,target)
#损失函数对比
plt.plot(range(0, len(sgd_model.losses)), sgd_model.losses,'b')
plt.plot(range(0, len(dfp_model.losses)), dfp_model.losses,'r')
[<matplotlib.lines.Line2D at 0x169fb529588>]
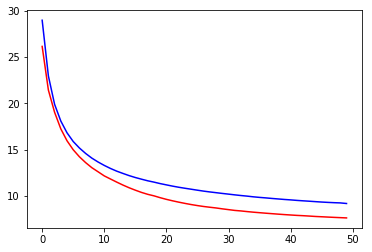
可以发现,大部分情况下DFP比SGD收敛的更快,且收敛效果更好
#分类效果对比
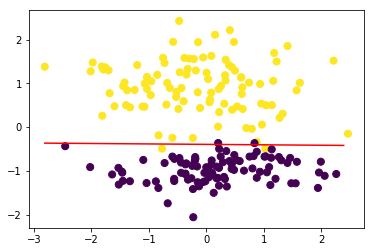
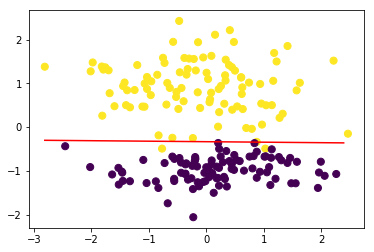
sgd_model.plot_decision_boundary(data,target)
dfp_model.plot_decision_boundary(data,target)
六.BFGS算法
BFGS算法是用一个矩阵\(B_k\)去模拟海瑟矩阵\(H_k\),它的更新公式同样假设有两个附加项:
当然,它需要满足拟牛顿条件:
所以:
考虑,使\(P_k\)和\(Q_k\)满足下面两个条件:
可以得到满足条件的解:
所以更新公式:
同样可以证明,如果\(B_0\)正定对称,那么迭代过程中的每个矩阵\(B_k\)都是正定对称的,由于这里是对\(H_k\)的近似,所以每次更新梯度时,还需要对\(B_k\)做求逆计算,我们可以使用两次如下的Sherman-Morrison公式:
得到BFGS算法关于\(G_k\)的迭代公式:
接下来,进行代码实现:
"""
BFGS拟牛顿法,封装到ml_models.optimization模块,与梯度下降法配合使用
"""
class BFGS(object):
def __init__(self, x0, g0):
"""
:param x0: 初始的x
:param g0: 初始x对应的梯度
"""
self.x0 = x0
self.g0 = g0
# 初始化B0
self.B0 = np.eye(len(x0))
def update_quasi_newton_matrix(self, x1, g1):
"""
更新拟牛顿矩阵
:param x1:
:param g1:
:return:
"""
# 进行一步更新
y0 = g1 - self.g0
delta0 = x1 - self.x0
self.B0 = self.B0 + y0.dot(y0.T) / y0.T.dot(delta0)[0][0] - self.B0.dot(delta0).dot(delta0.T).dot(self.B0) / \
delta0.T.dot(self.B0).dot(delta0)[0][0]
def adjust_gradient(self, gradient):
"""
对原始的梯度做调整
:param gradient:
:return:
"""
return np.linalg.pinv(self.B0).dot(gradient)
应用到LogisticRegression
fit函数追加如下的一个判断:
elif self.solver == 'bfgs':
self.bfgs = None
self._fit_sgd(x, y)
_fit_sgd函数中,在梯度更新前做如下调整:
if self.solver == 'bfgs':
if self.bfgs is None:
self.bfgs = optimization.BFGS(x0=self.w, g0=dw)
else:
# 更新一次拟牛顿矩阵
self.bfgs.update_quasi_newton_matrix(self.w, dw)
# 调整梯度方向
dw = self.bfgs.adjust_gradient(dw)
#训练模型
bfgs_model = LogisticRegression(solver='bfgs',epochs=50)
bfgs_model.fit(data,target)
#损失函数对比
plt.plot(range(0, len(sgd_model.losses)), sgd_model.losses,'b')
plt.plot(range(0, len(dfp_model.losses)), dfp_model.losses,'r')
plt.plot(range(0, len(bfgs_model.losses)), bfgs_model.losses,'y')
[<matplotlib.lines.Line2D at 0x169fd6e7b38>]
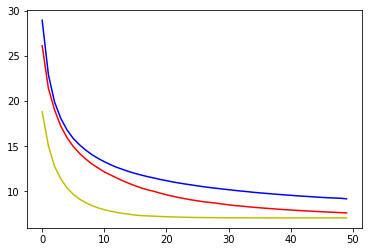
可以发现大部分情况下BFGS会比DFS收敛更快
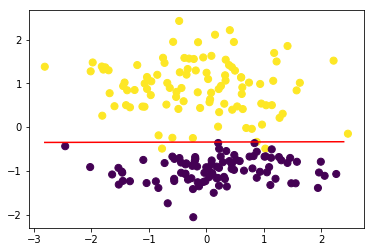
#查看效果
bfgs_model.plot_decision_boundary(data,target)