1
图像分割技术基本原理
1.1
图像滤波
由于影像采集设备的工作原理以及设备制造技术的限制,在图像采集的过程中在图像中产生噪声是不可避免的;此外,使用者的操作水平也会对图像的质量造成影响,这些因素都导致最终的图像中会存在大量的噪声信号。设备采集到的每个点的值所代表的是这个点附近一个小区域的平均效应,在不同组织的交界处,这种机理不可避免地会造成边缘的模糊;因此,在执行分割算法之前,有必要对图像进行一些预处理以减少噪声。
图像滤波可以更改或者增强图像,通过滤波可以强调一些特征或者去除图像中一些不需要的部分。图像滤波既可以在实域进行,也可以在频域进行。滤波是一个邻域操作算子,利用给定像素周围的像素的值决定此像素的最终的输出值。图像滤波通过下式描述

其中,O是滤波后的图像,I是原始图像,K为滤波器,也称之为核。
常见的滤波由均值滤波、中值滤波、高斯滤波。均值滤波用其像素点周围像素的平均值代替元像素值,在滤除噪声的同时也会滤掉图像的边缘信息。中值滤波用测试像素周围邻域像素集中的中值代替原像素。中值滤波去除椒盐噪声和斑块噪声时,效果非常明显。高斯滤波的像素点离核的原点距离越近,得到的权重越高,越远离原点,得到的权重越小,类似于加权的均值滤波。
1.2
图像梯度
图像函数I(x,y)在点(x,y)的梯度是一个具有大小和方向的矢量,定义GX,GY分别表示x方向和y方向的梯度,梯度的方向是函数f(x,y)变化最快的方向,当图像中存在边缘时,一定有较大的梯度值,相反,当图像中有比较平滑的部分时,灰度值变化较小,则相应的梯度也较小。梯度矢量可以表示为
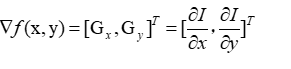
这个矢量的幅度为
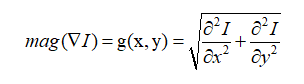
方向角为

对图像梯度而言,图像上灰度变化值大的地方表示有较大梯度值的地方。
1.3
图像分割
图像分割是将图像细分为构成它的子区域或对象,这些区域互不相交,每个区域都满足特性一致性。在医学领域,图像分割是从原始图像中把感兴趣的区域提取并显示出来,是病变区域提取、特定组织测量及三维重建的基础,为临床诊断治疗提供可靠信息。
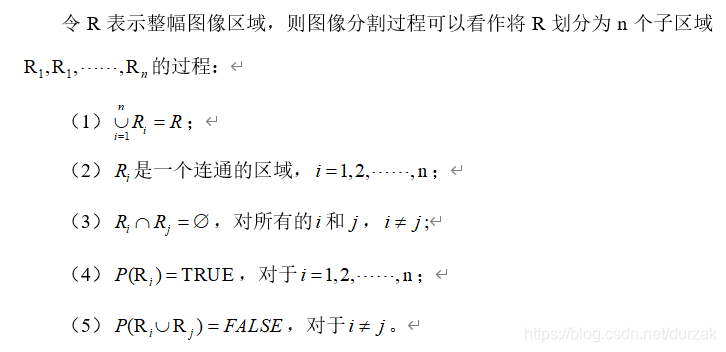
其中,P表示在同一分割区域内的像素必须满足的性质。
图像分割算法一般是基于亮度值的两个特性之一:不连续性和相似性。因此,图像分割算法可分为三类:
1)基于区域的分割算法,利用区域之间的相似度;
2)基于边缘的分割算法,利用区域之间的差异性;
3)将二者结合的分割算法。
阈值分割法
阈值分割法是最简单的一种图像分割方法,也是最常用的并行区域技术。由于阈值法的直观性和易于实现的性质,使它在图像分割应用中处于中心地位。阈值法的基本思想是用一个阈值(称为单阈值)或几个阈值(称为多阈值)将图像的灰度级分为几个部分,令属于同一部分的像素为同一目标,进而实现图像分割。
基于阈值分割法的优点是计算简单,运算速度快。对于灰度差异很大的不同目标和背景能有效分割。缺点是难以处理包含多个前景物体的图像或灰度值差异不明显的图像。由于阈值法一般只考虑像素本身的灰度值,而不考虑空间特征,因此对噪声比较敏感。在分割医学图像时,通常与其他方法结合使用。
基于边缘的分割算法
基于边缘的分割算法,利用区域之间的差异性检测出不同区域间的边缘,进而达到分割图像的目的。对于灰度级间断的检测,边缘检测是最普遍的检测方法,也是基于边界分割方法的第一步。边缘检测一般是借助于空间域微分算子进行的,通过将微分算子的模板与图像进行卷积来实现。常用的一阶微分算子有梯度算子、Robers 算子、Prewitt 算子和 Sobel 算子,二阶微分算子有 Laplacian 算子和Kirsh算子等。
两个具有不同灰度值的相邻区域之间总存在灰度边缘,这种灰度边缘是灰度值不连续的结果,而典型的随机噪声就是由灰度级的尖锐变化组成,所以当利用上述算子检测灰度边缘时,难以克服噪声的影响。因此这些算子对噪声敏感,不适合直接用于存在噪声污染且复杂的医学图像。针对此问题,拉普拉斯高斯算子和 Canny 算子是具有平滑功能的二阶和一阶微分算子,能够较好的抑制噪声干扰,边缘检测效果较好。此外,可以通过在使用边缘检测算法后接着使用连接过程,将检测结果组合成有意义的边缘。
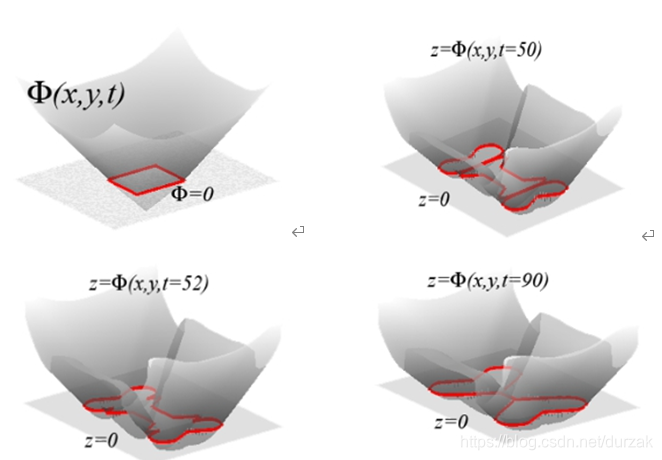
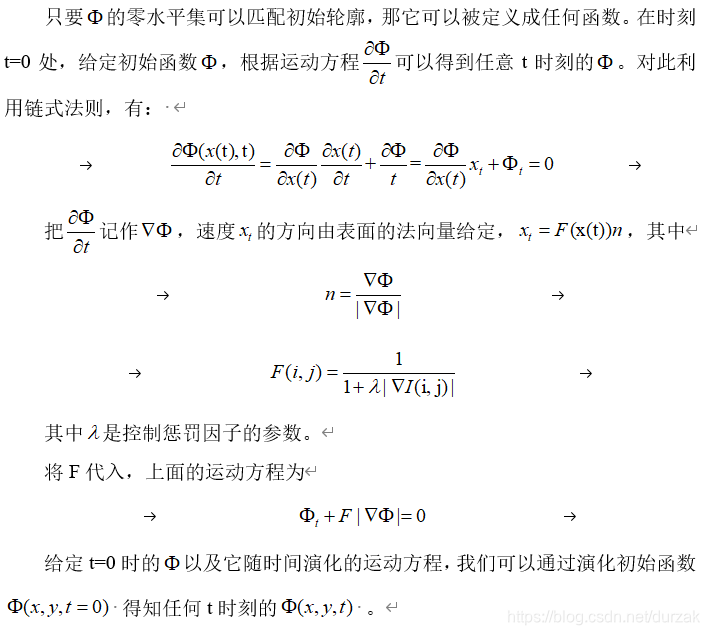
基于水平集的分割方法
水平集的本质是演化一个表面S,用隐式轮廓法得到的水前定义为这个表面S在高度h=0的所有点构成的集合。于是根据定义,水前曲线就是零水平集。点(x,y) 属于一个随着时间演化的曲线,x(t)为它在t时刻的位置。在任意时刻t,对于每一个点x(t)都是表面fhi在高度为0的曲线上的点,即