基变换的原理:数据与一个基做内积运算,即为当前数据映射到新的基中所表示的结果。对原有的数据进行基变换,得到一种新的特征表达,而数据的主方向,就是特征幅值变更最大的方向。寻找一个一维基,使得所有数据变换为这个基的坐标表示后,方差最大。
 这里的c指的是点云的中心,在求解方差时需要对点云进行去中心化处理。
这里的c指的是点云的中心,在求解方差时需要对点云进行去中心化处理。
如果单纯只是选择方差最大的方向,后续方向应该会和方差最大的方向接近或重合,为了让两个字段尽可能表示更多的原始信息,可使其它们不存在相关性,即两个字段的协方差为0,表示两个字段完全独立,选择第二个基时只能在与第一个基正交的方向上选择,对点云进行去中心化处理后的协方差可以表示为:
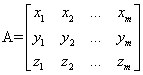
对于m个三维点云来说,其协方差矩阵可以表示为:

因为x,y,z 轴是正交轴,所以其则其两两之间的协方差矩阵都等于0,即上述协方差矩阵除对角线外其他的元素都化为0,并且在对角线将元素按大小从上到下排列。因此需要对协方差矩阵进行对角化,且对于实对称矩阵具有如下性质:
一个n行n列的是对称阵一定可以找到n个单位正交特征向量

对该实对称矩阵进行对角化可得: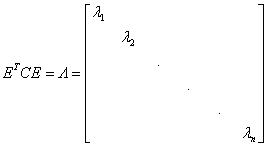
当然,这里的特征值计算既可以根据对称矩阵对角化的方法,也可以根据上文所说的SVD分解后求U的最后一列直接得出最小特征值。这里着重强调对方差的理解:方差越大,证明在点云在该轴上的投影分布越分散,包含的信息越多,特征值越大,此时最大特征值所对应的特征向量即为点云投影最分散时的向量。反之,最小特征值即为点云在特征向量方向上投影最密集的方向。
