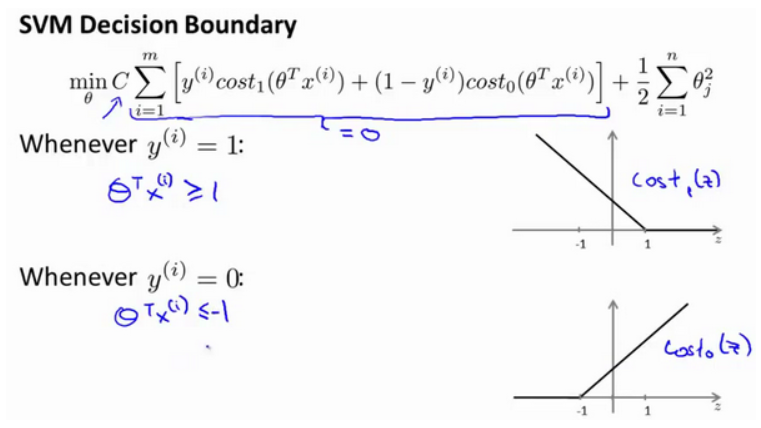
支持向量机模型的代价函数:

如果有一个正样本 ,其实仅仅要求 大于等于0,就能将该样本恰当分出,这是因为如果 >0 的话,代价函数值为0;类似地,如果有一个负样本,则仅需要 <=0 就会将负例正确分离。但是,支持向量机的要求更高,不仅仅要能正确分开输入的样本,即不仅仅要求 >0,它需要的是比0值大很多,比如大于等于1,或者比0小很多,比如小于等于-1,这就相当于在支持向量机中嵌入了一个额外的安全因子,或者说安全的间距因子。
支持向量机的决策边界:
假设将常数 设为一个非常大的值,观察支持向量机会给出什么结果?
如果 非常大,则最小化代价函数的时候,我们将会很希望找到一个使第一项为0的最优解。
在代价项为0的情形下,将有如下约束:如果
= 1,
;如果
= 0,
。
这样当最小化这个关于变量
的函数的时候,你会得到一个非常有趣的决策边界:
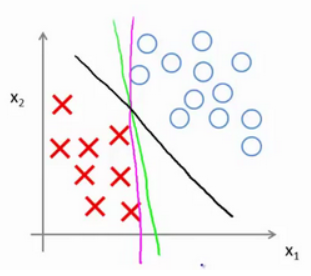
三条决策边界中,黑线看起来是更稳健的决策界。在分离正样本和负样本上它显得更好。从数学上来讲,这条黑线有更大的距离,这个距离叫做间距(margin)。
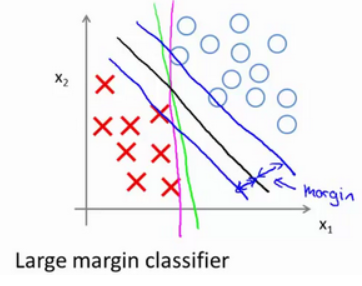
当画出两条额外的蓝线,黑色的决策界和训练样本之间有更大的最短距离,这个距离叫做支持向量机的间距,而这是支持向量机具有鲁棒性的原因,因为它努力用一个最大间距来分离样本。因此支持向量机有时被称为大间距分类器。
对代价函数的条件更严格而产生的决策边界
在让代价函数最小化的过程中,我们希望找出在 和 两种情况下都使得代价函数中左边一项尽量为零的参数。如果我们找到了这样的参数,则我们的最小化问题便转变成:

事实上,支持向量机要比上述大间距分类器体现得更成熟,尤其是当你使用大间距分类器的时候,你的学习算法会受异常点(outlier) 的影响,比如加入一个额外的正样本:

仅仅基于一个异常值,仅仅基于一个样本,就将决策界从这条黑线变到这条粉线,这实在是不明智的。
实际上应用支持向量机的时,当 不是非常非常大的时候,它可以忽略掉一些异常点的影响,得到更好的决策界。甚至当你的数据不是线性可分的时候,支持向量机也可以给出好的结果。
C较大时,可能会导致过拟合,高方差。
C较小时,可能会导致低拟合,高偏差。
