只是学习过程用于笔记记录。用于以后复习
机器人的一些应用
机器视觉
ROS中的图像数据
-
显示图像类型(二维图像)
-
roslaunch usb_cam usb_cam-test.launch
rostopic info /usb_cam/image_raw
使用rosmsg show sensor_msga/Imags 查看消息类型
-
Header :消息头,包含消息序号,时间戳和绑定坐标系
-
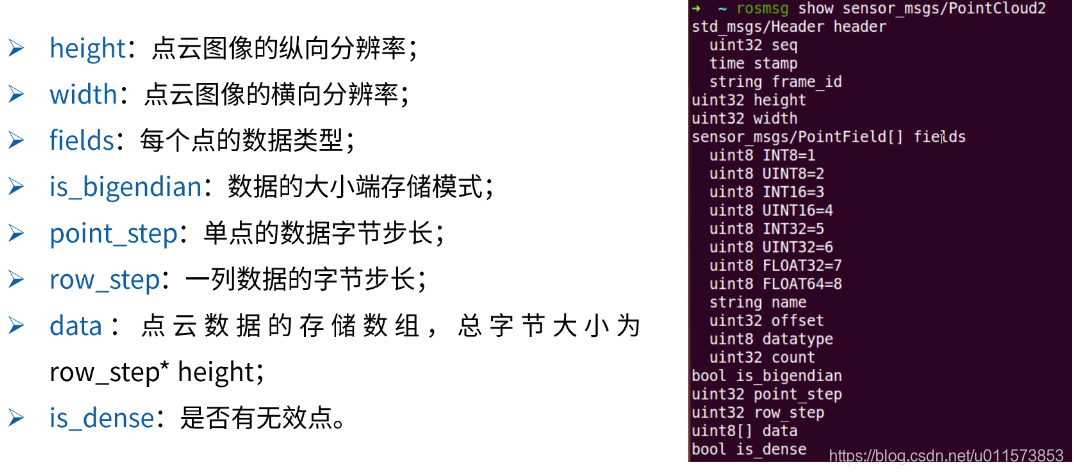
height:图像的纵向分辨率
-
width:图像的横向分辨率
-
encoding:图像的编码格式,包含RGB、YUV等常用格式,不涉及图像压缩码
-
is_bigendian:图像数据的大小端存储模式
-
step:一行图像数据的字节数量,作为数据步长参数
-
data:存储图像数据的数组,大小step×height个字节
-
1080720存储的图像数据的数组,大小为31080*720=2764800 个字节
-
std_msgs/ Header headerv
unit32 seq //消息序号
time stamp //时间戳
string fame_id //绑定的坐标系,手动设置
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
- 压缩数据的格式
rosmsg show sensor_msgs/CompressdImage
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string format //图像压缩的编码格式(jpeg png bmp)
uint8[] data //存储的图像数据数组
-
图像类型(三维图像)
显示点云类型:roslaunch freenect_launch freenect.launch
rostopic info /camera/depth_registered/points
查看点云消息
> rosmsg show sensor_msgs/PointCloud2
摄像头标定
摄像头为什么要标定
-
摄像头对光学器件的要求较高,由于摄像头内部与外部的一些原因,生成的物体图像往往会发生崎变,为避免数据源造成的误差,需要针对摄像头的参数进行标定。
-
安装标定功能包
-
$ sudo apt-get install ros-kinetic-camera-calibration
摄像头标定流程
-
启动摄像头
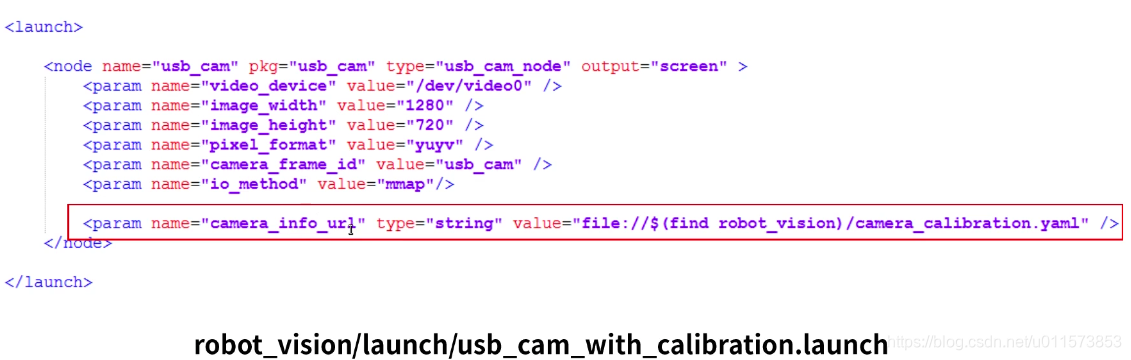
- roslaunch robot_vision usb_cam.launch
-
启动标定包
-
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
size:标定棋盘格的内部角点的个数,这里使用的棋盘一共6行,每行有8个内部角点;
square:这个参数对应每一个棋盘格的边长,单位为米
image和camera:设置摄像头发布的图像话题
X:标定靶在摄像头视野中的左右移动
Y:标定靶在摄像头视野中的上下移动
Size:标定靶在摄像头视野中前后移动
Skew:标定靶在摄像头视野的倾斜转动
-
Kinect标定流程
-
启动kinect
- roslaunch robot_vision freenect.launch
-
启动彩色摄像头
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/camera/rgb/image_raw camera:=/camera/rgb
-
标定红外摄像头
- rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/camera/ir/image_raw camera:=/camera/ir
摄像头如何使用标定文件

OpenCV
安装Opencv
sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv
测试案例
roslaunch robot_vision usb_cam.launch
rosrun robot_vision cv_bridge_test.py
rqt_image_view
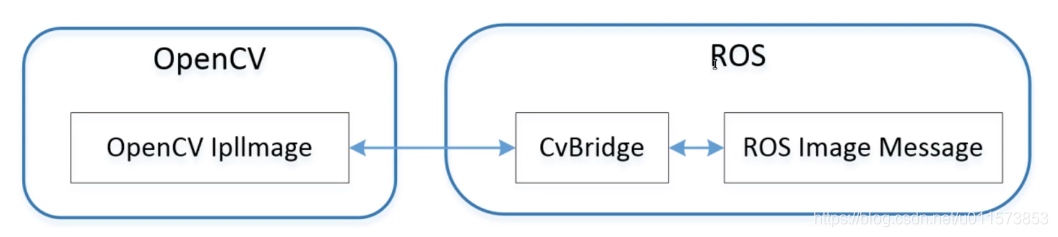
图像转换
imgmsg_to_cv2():将ROS图像消息装换成OpenCv图像数据
cv2_to_imgmsg():将OpenCV格式的图像数据转换成ROS图像消息
人脸识别
流程
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3Cz2GCJH-1574339788605)(/home/xj/笔记图片/5.5.png)]](https://img-blog.csdnimg.cn/20191121204114984.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTE1NzM4NTM=,size_16,color_FFFFFF,t_70)
-
启动人脸识别实例
roslaunch robot_vision usb_cam.launch
roslaunch robot_vision face_detector.launch
rqt_image_view
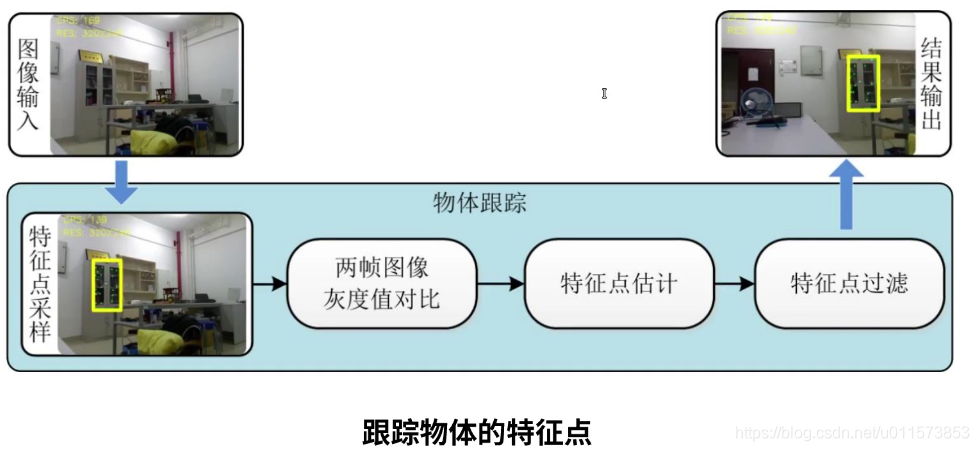
物体跟踪
流程
-
启动物体跟踪实例
roslaunch robot_vision usb_cam.launch
roslaunch robot_vision motion_detector.launch
rqt_image_view
-
初始化部分:完成ROS节点、图像、识别参数的设置
-
图像处理:将图像转换成OpenCV格式完成图像预处理之后开始针对两帧图像进行比较。基于图像差异识别到运动的物体,最后标识识别结果并发布
二维码识别
-
安装二维码识别功能
sudo apt-get install ros-kinetic-ar-track-alvar
-
创建二维码
rosrun ar_track_alvar createMarker
rosrun ar_track_alvar createMarker 0
-
启动
roslaunch robot_vision freenect.launch
roslaunch robot_vision ar_track_kinect.launch
物体识别与机器学习
Object Recognition Kitchen(ORK)框架
TensorFlow Object Detection API
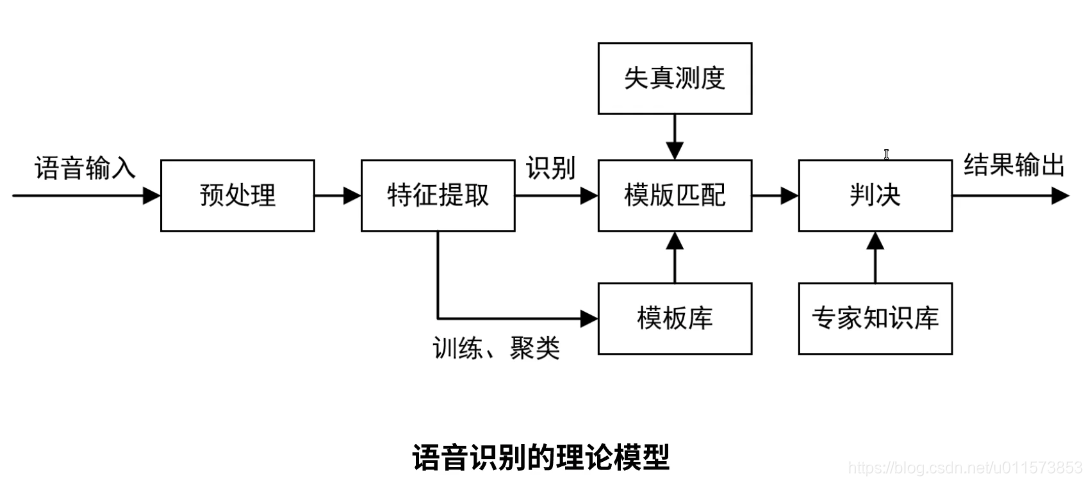
机器语音
- 流程
-
常用功能包
- pocketsphinx:集成CMU Sphinx和Festival开源项目中的代码,实现语言识别的功能
- audio-common:提供了文本转语音(Text-to-speech)的功能实现完成机器人说话
- AIML:人工智能标记语言,Aritificial Intelligence Markup Language,是一种创建自然语言软件代理的XML语言
-
参考书:《ROS ROBOTICS PROJECTS》
科大讯飞SDK
- 下载SDK
- 使用SDK :将libmsc.so 拷贝到系统目录下 sudo cp libmsc.so /usr/lib/libmsc.so
- 注意:SDK带有ID号,每个人每次下载后的ID都不相同,更换SDK之后要修改代码中的APPID
编译注意
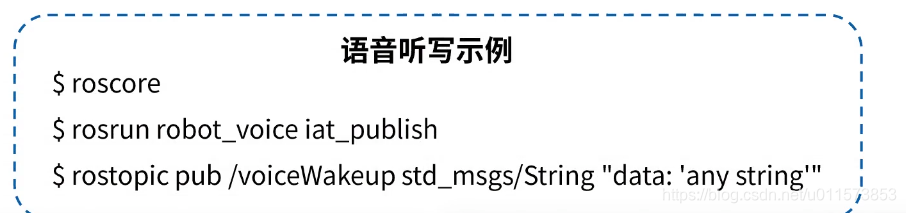
语音合成
- main函数声明了一个订阅voiceWords话题的subscriber,接受输入的语音字符串
- 回调函数voiceWordsCallback中使用SDK接口将字符串转换成中文语音
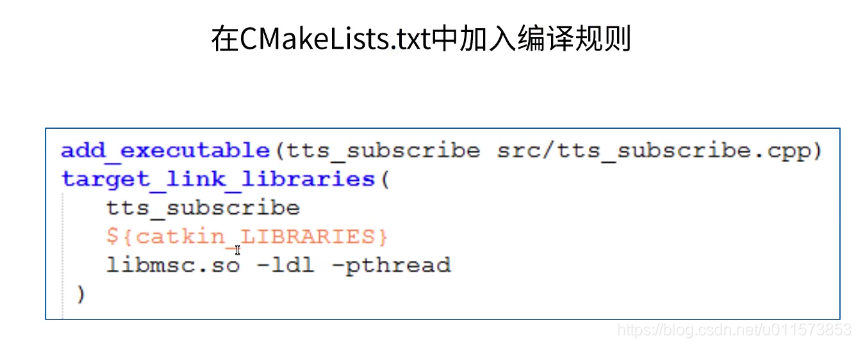
在编译功能包出现alsa/

语言助手
扩展阅读

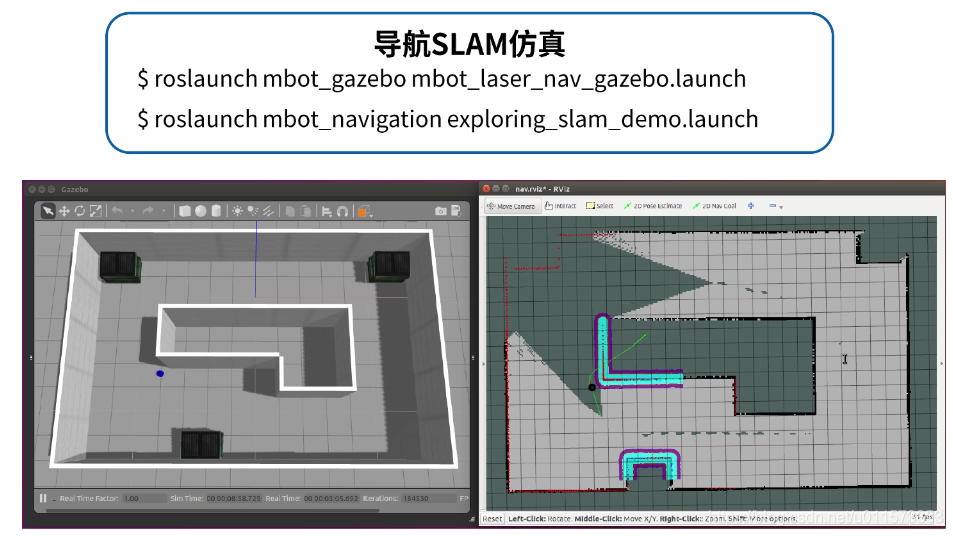
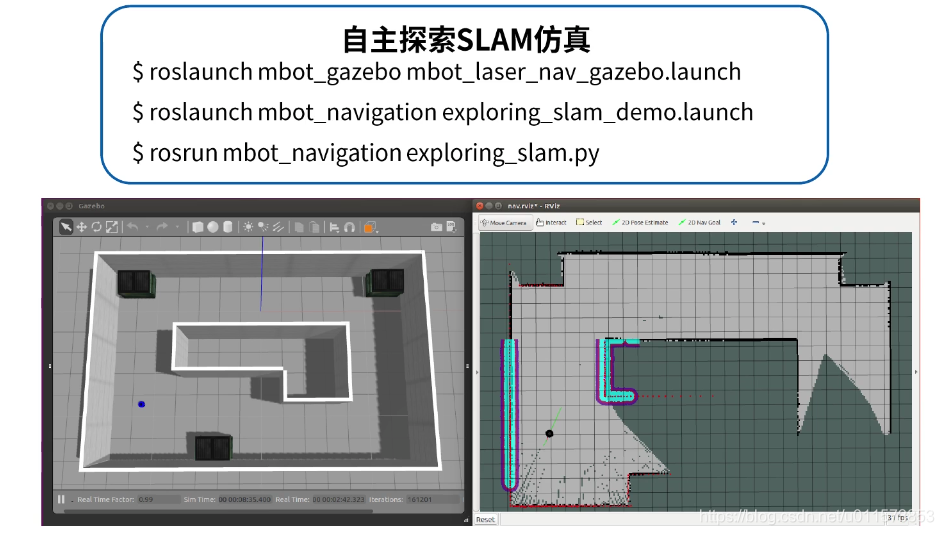
SLAM导航
机器人必备条件
- 硬件要求
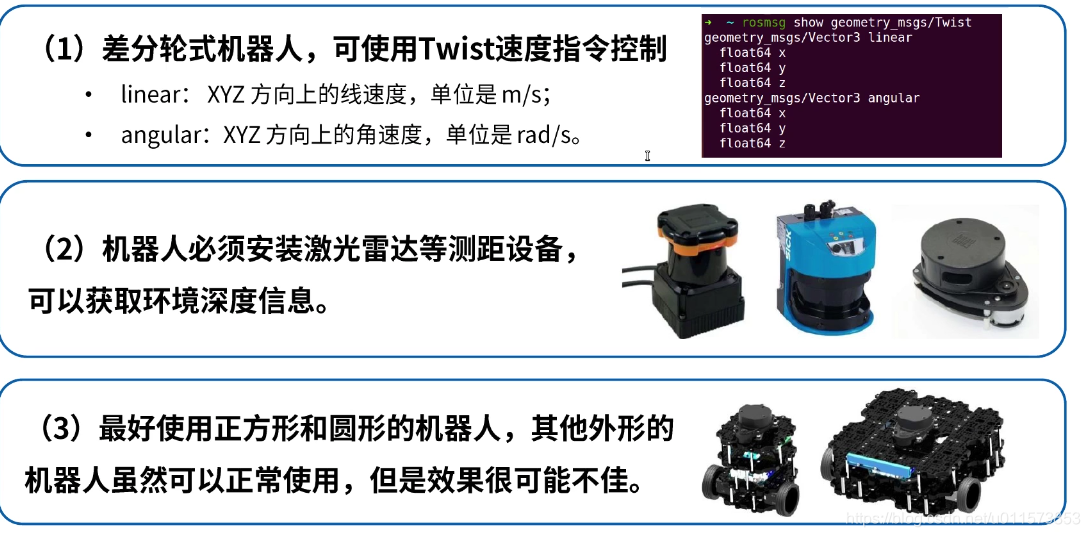
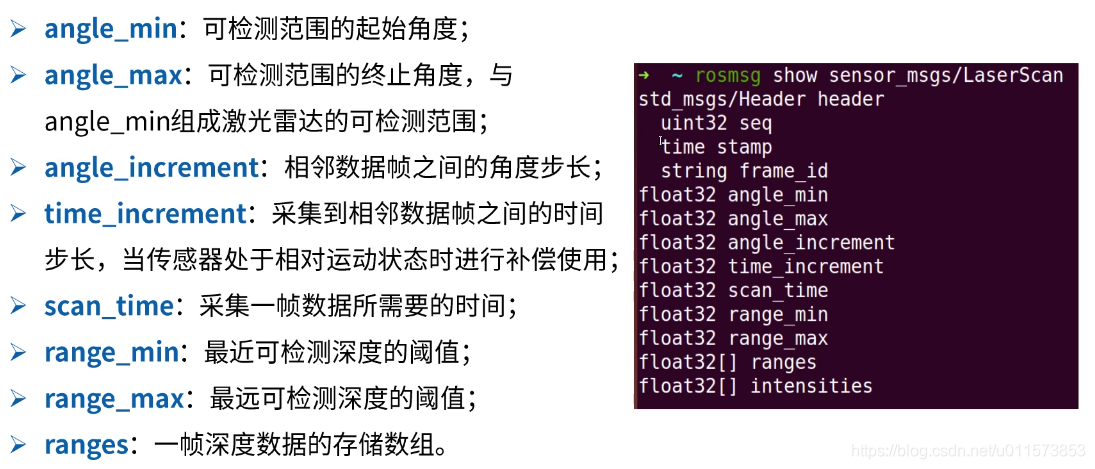
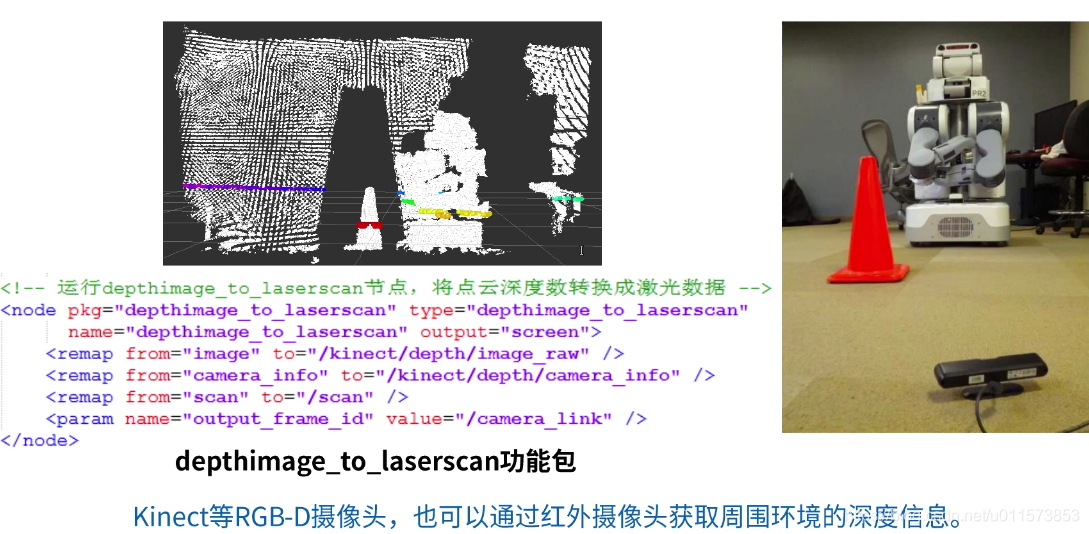
- 深度信息
- 里程计信息
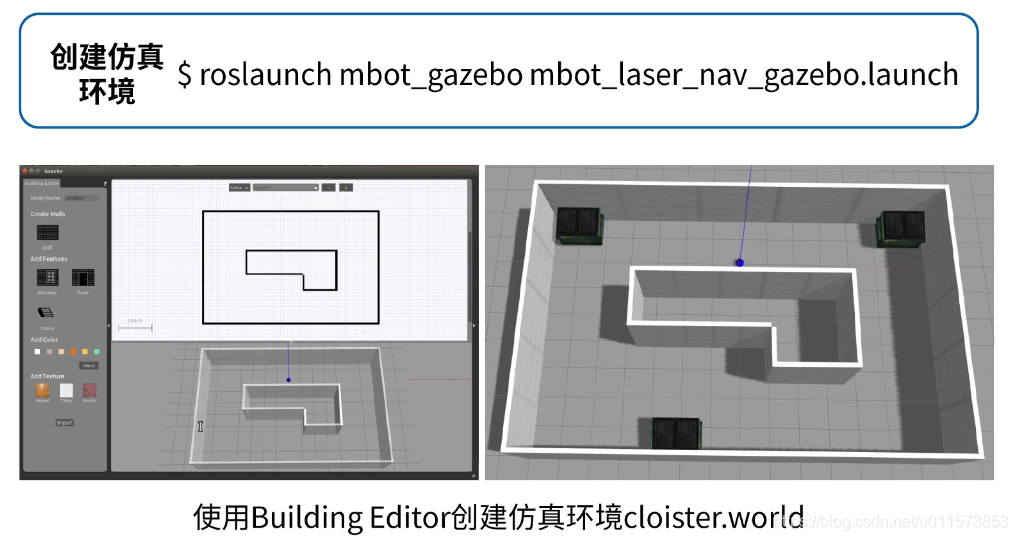
- 仿真环境
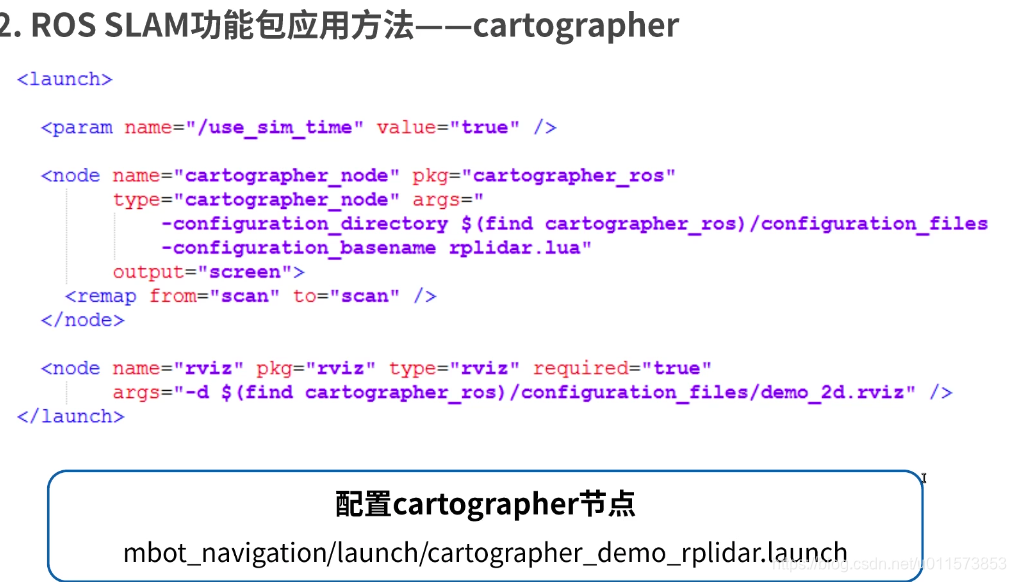
ROS SLAM功能包应用的方法
-
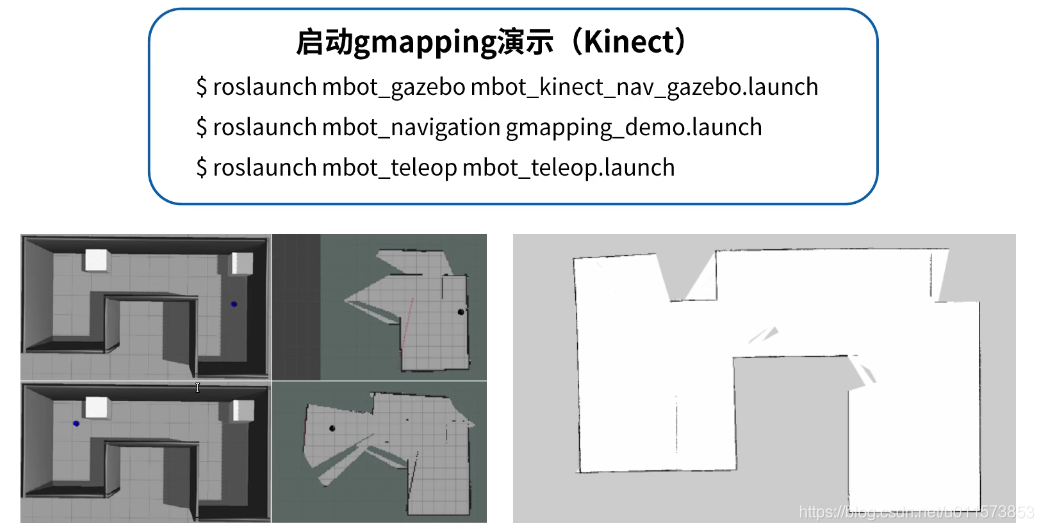
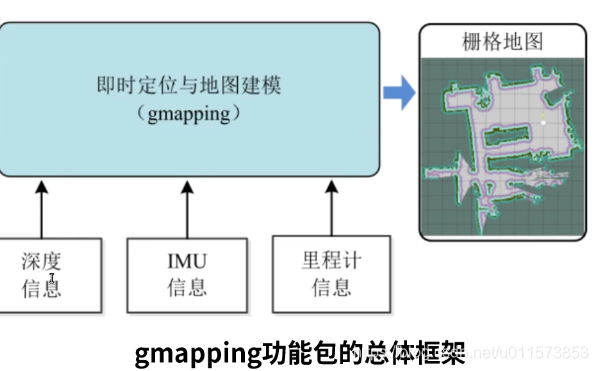
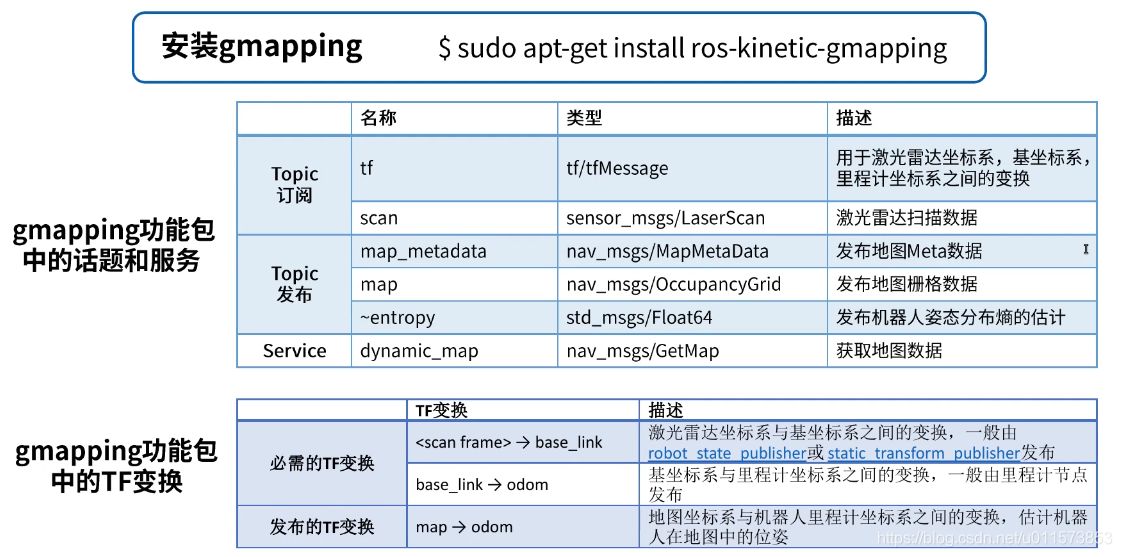
gmapping功能包
- 基于激光雷达
- Rao-Blackwellized粒子波算法
- 二维栅格地图
- 需要机器人提供里程计信息
- OpenSlam开源算法
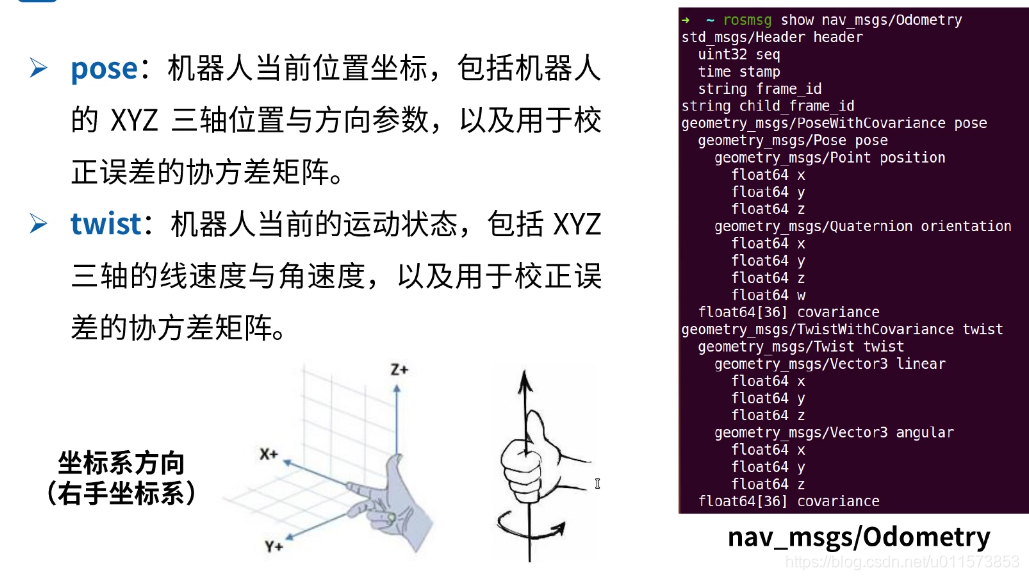
- 输出地图话题:nav_msgs/OccupancyGrid
- 论文参考:http://openslam.org/gmapping.html

-
保存地图:rosrun map_server map_saver -f cloister_gmapping
-
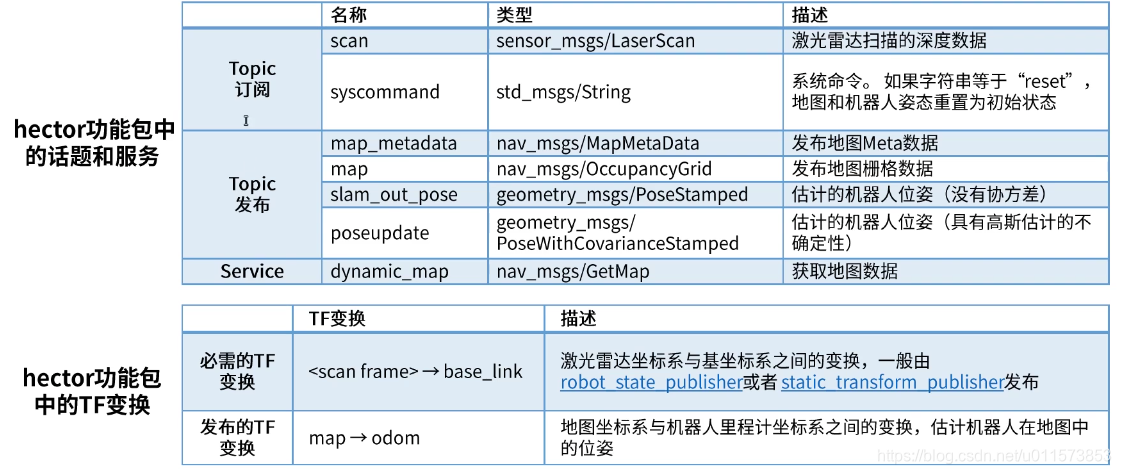
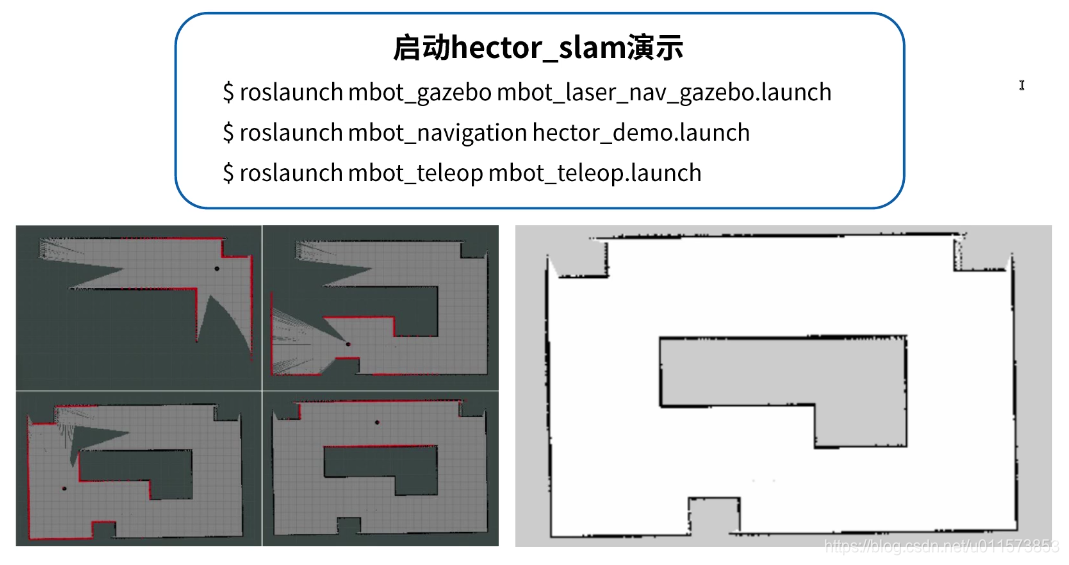
hector_slam
-
基于激光雷达
-
高斯牛顿方法
-
二位栅格地图
-
不需要里程计数据
-
输出地图话题:nav_msgs/OccupancyGrid
-
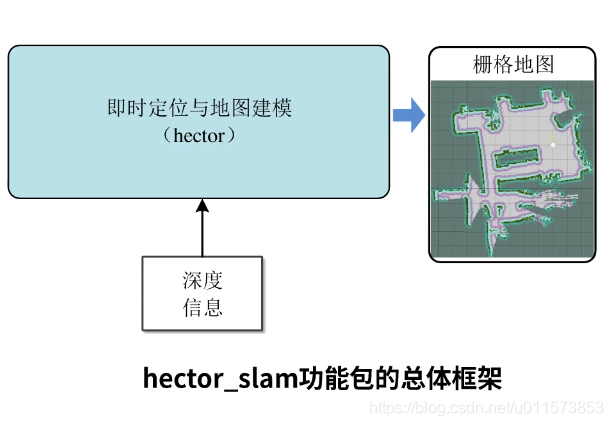
- 安装:sudo apt-get install ros-kinetic-hector-slam

-
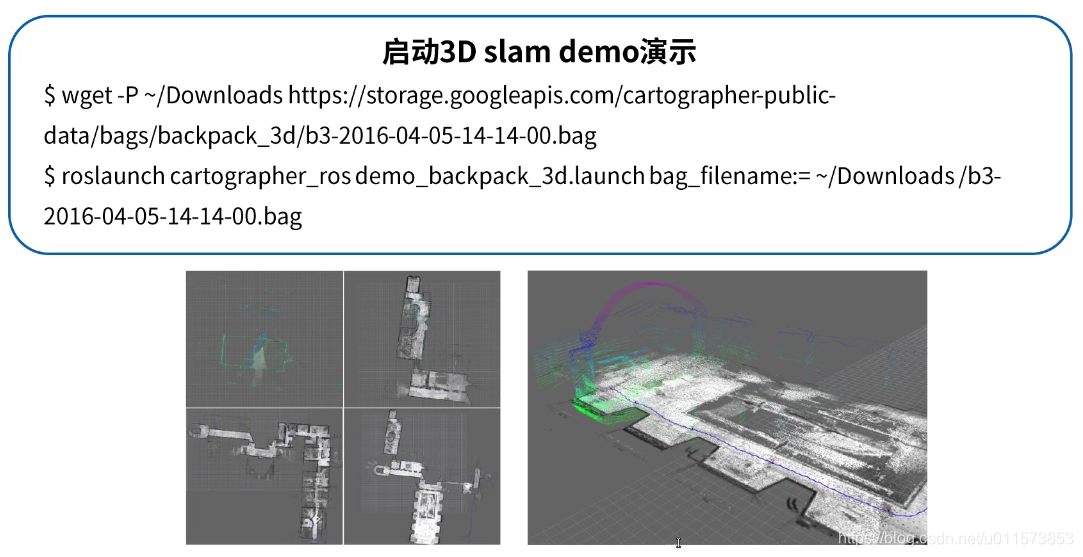
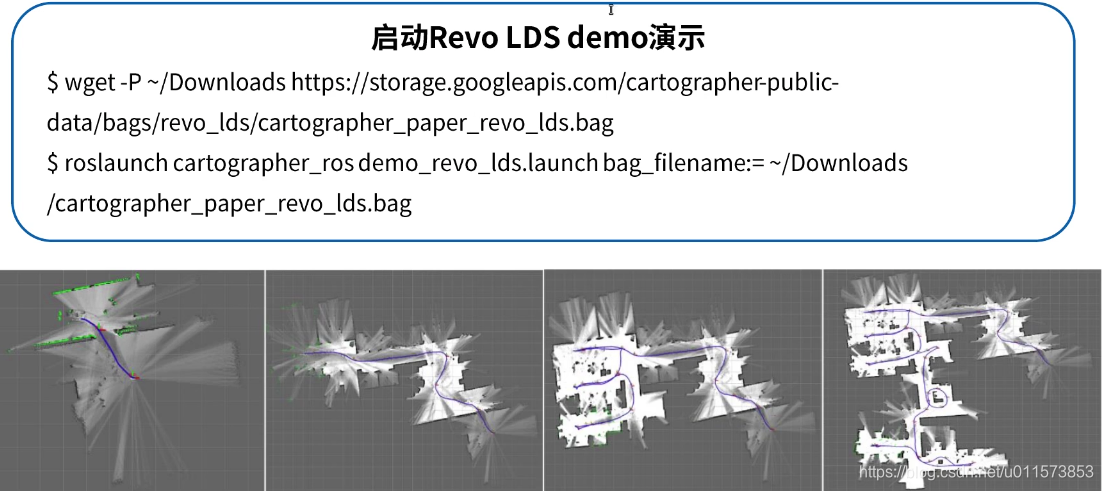
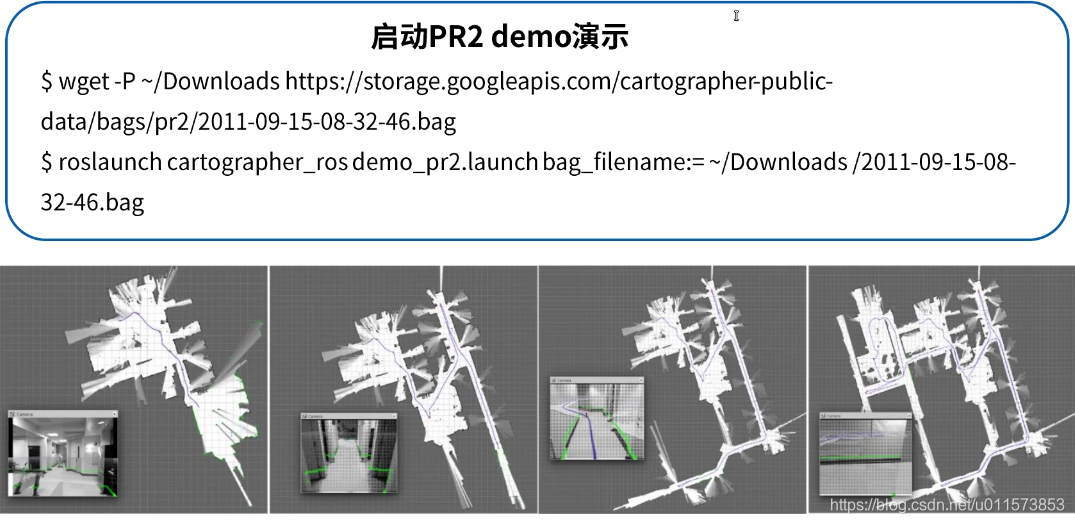
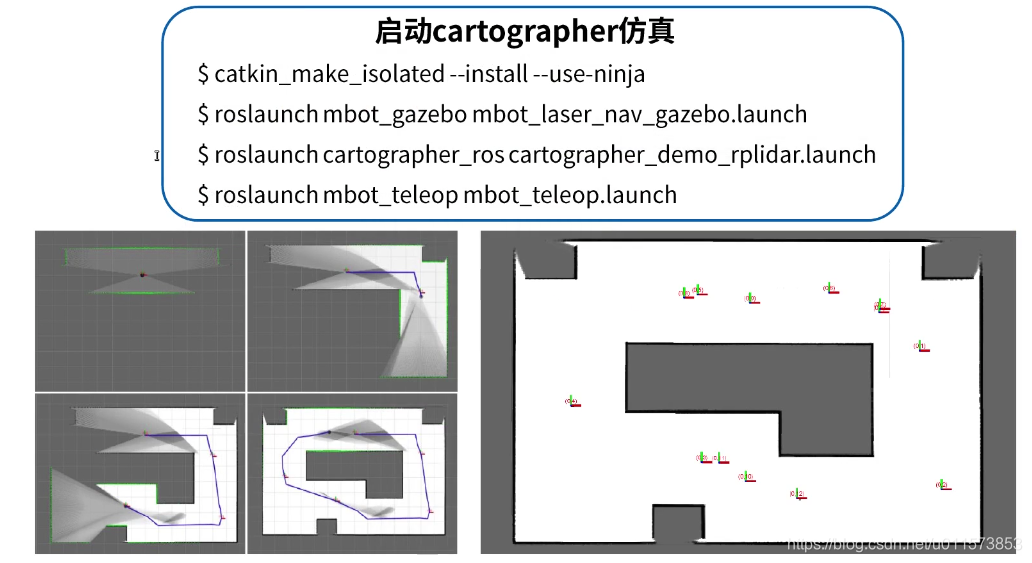
cartographer
-
2016年google开源
-
基于图网络的优化方法
-
二维或三维条件下的定位及建图功能
-
设计目的是在计算资源有限的情况下,实时获取相对高精度的2D地图
-
主要基于激光雷达
-
支持更多传感器和机器人平台
-
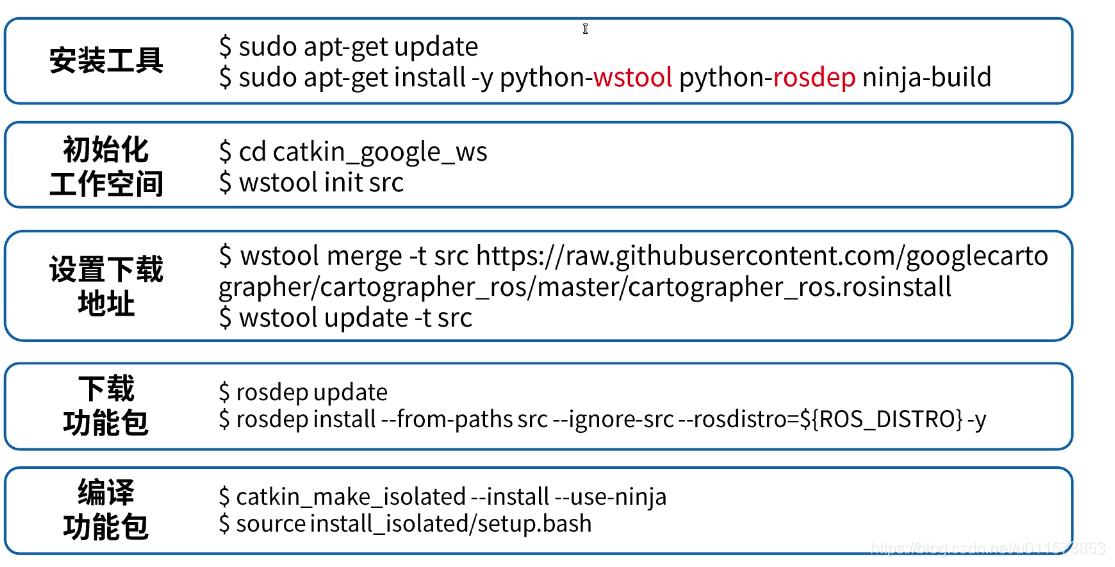
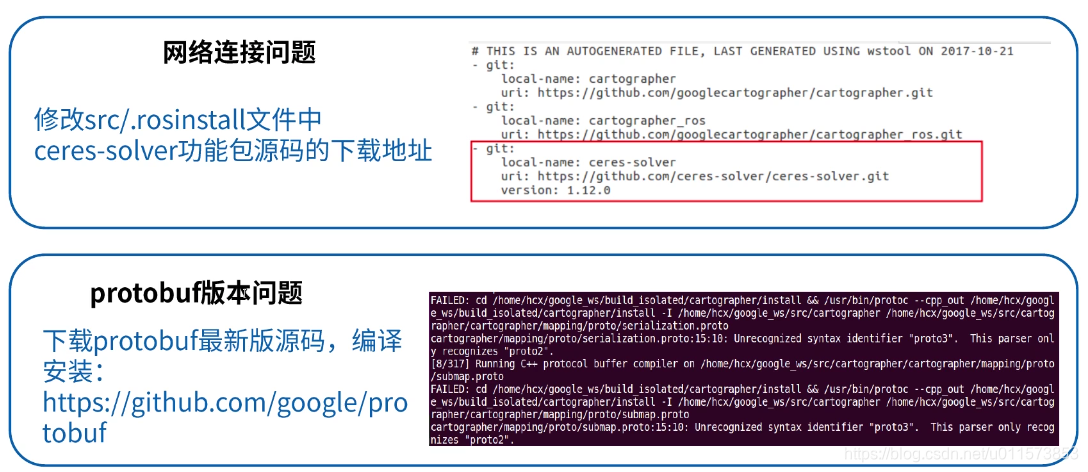
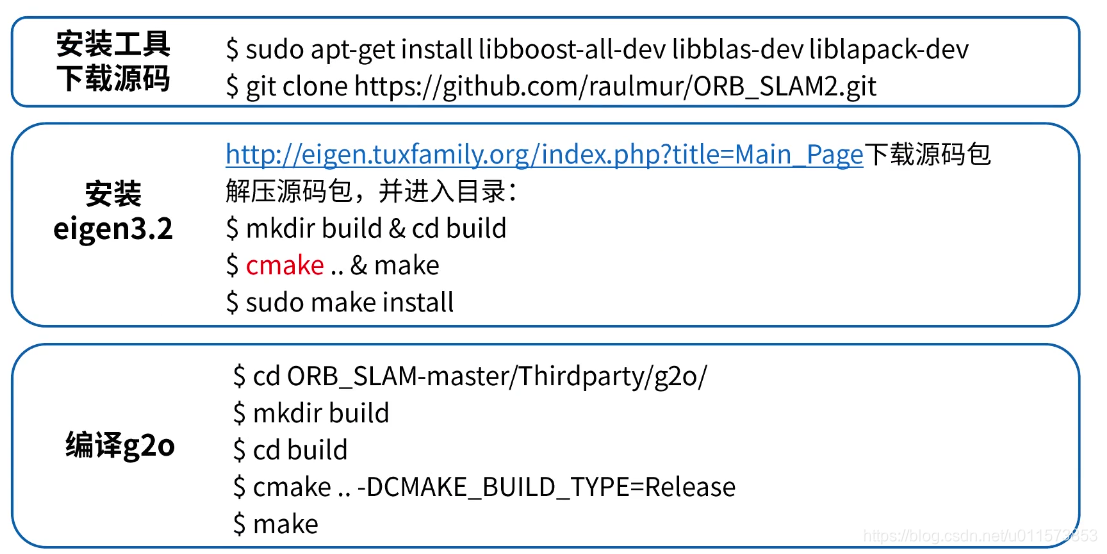
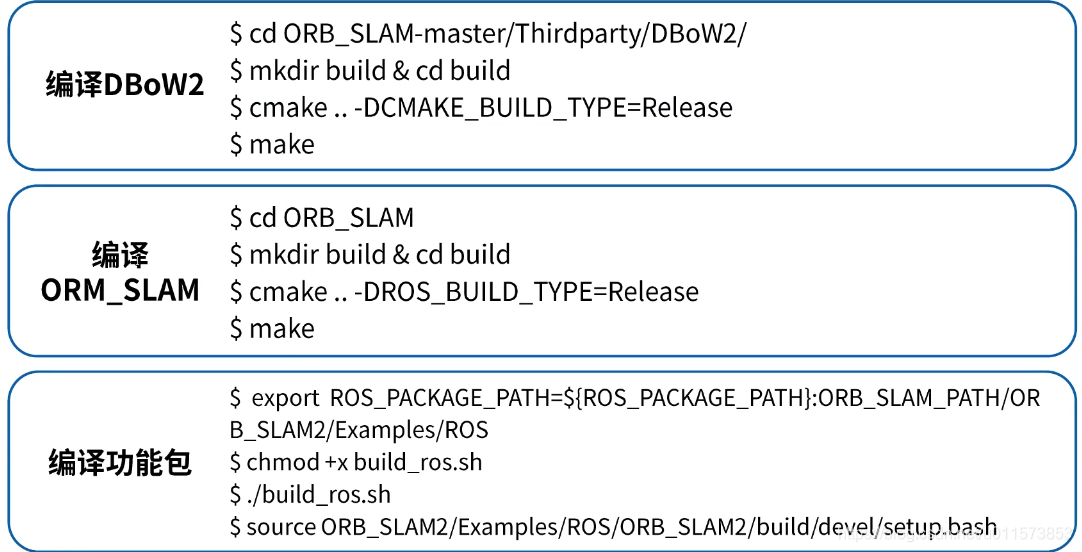
- 配置cartographer
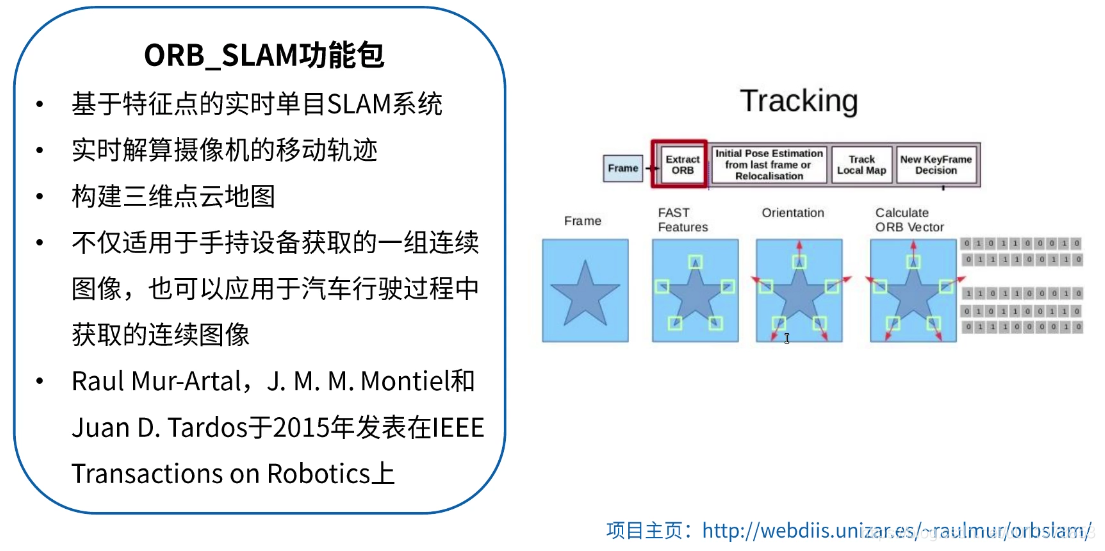
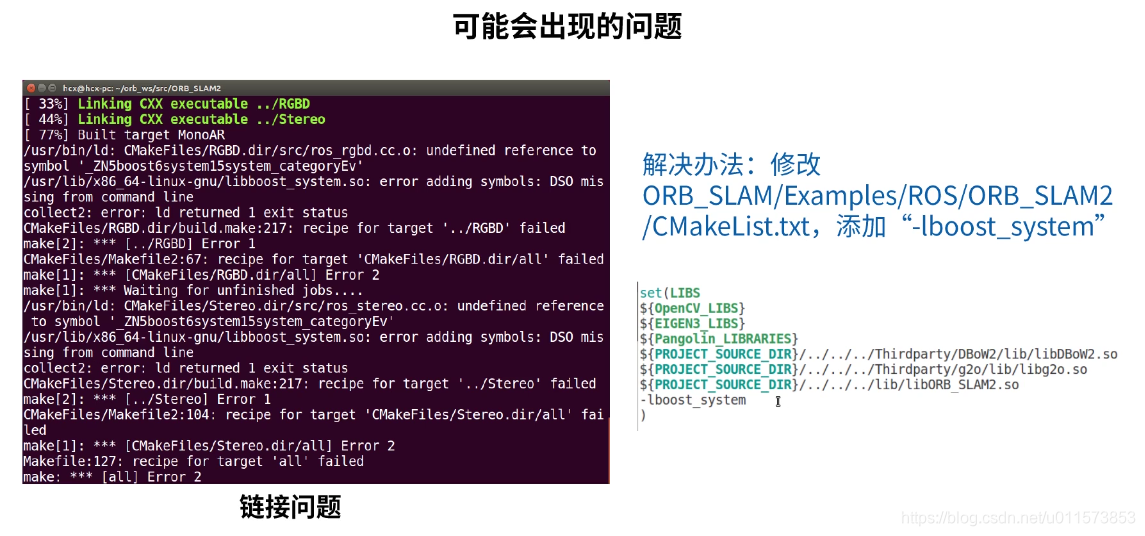
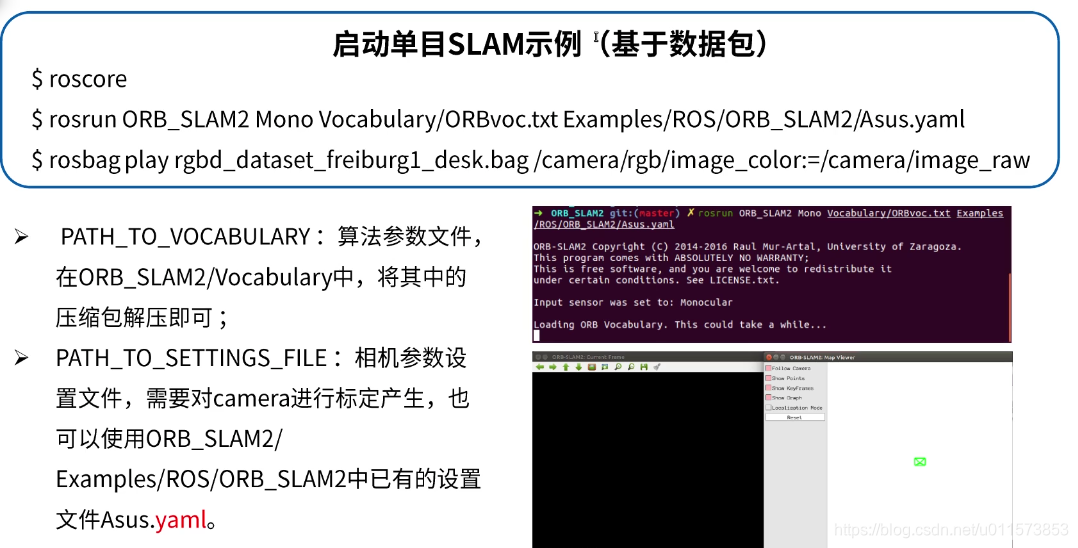
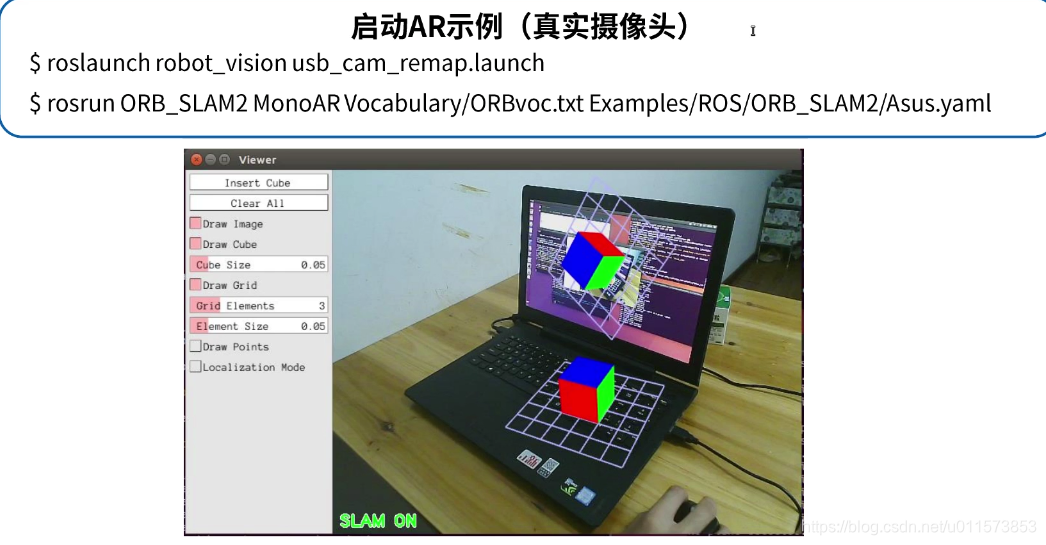
- ORB_SLAM
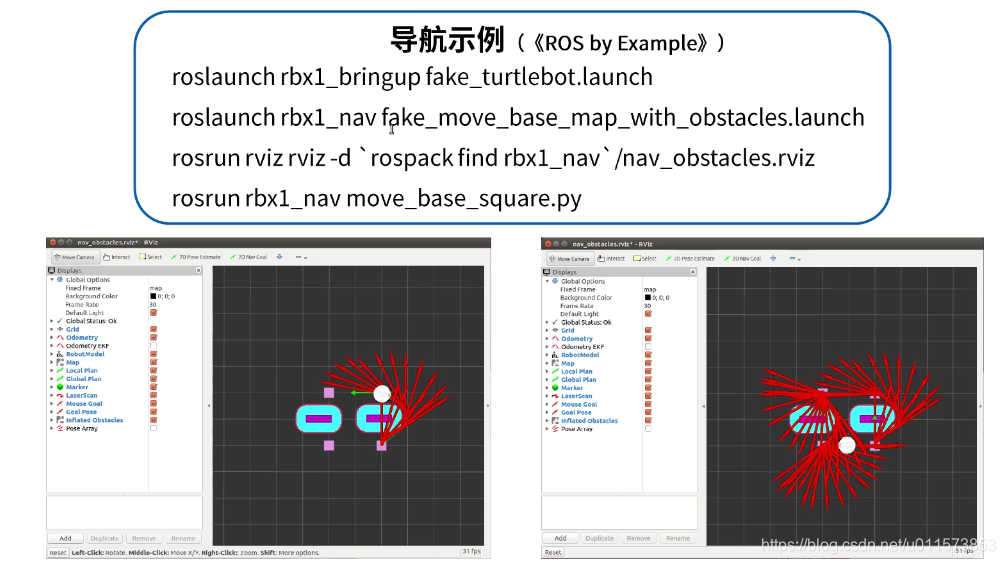
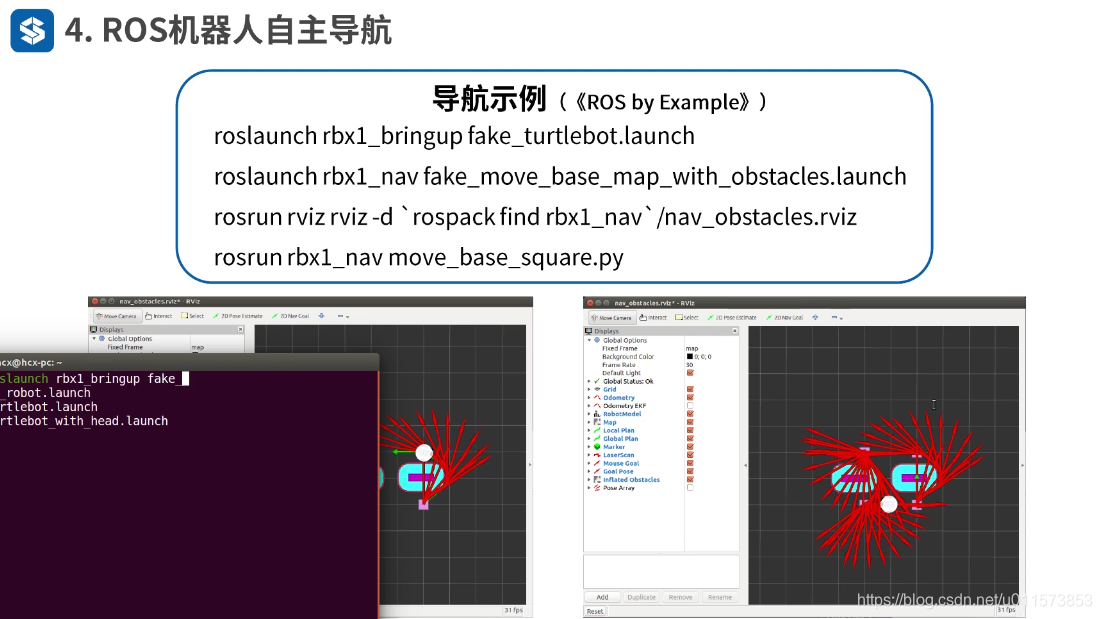
ROS 中的导航框架
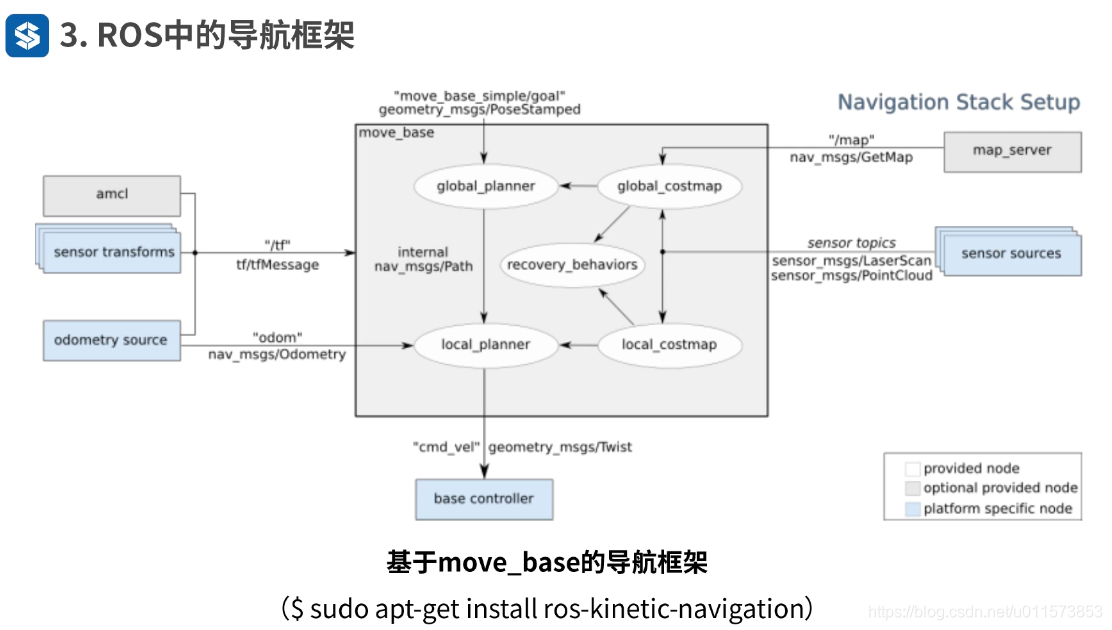
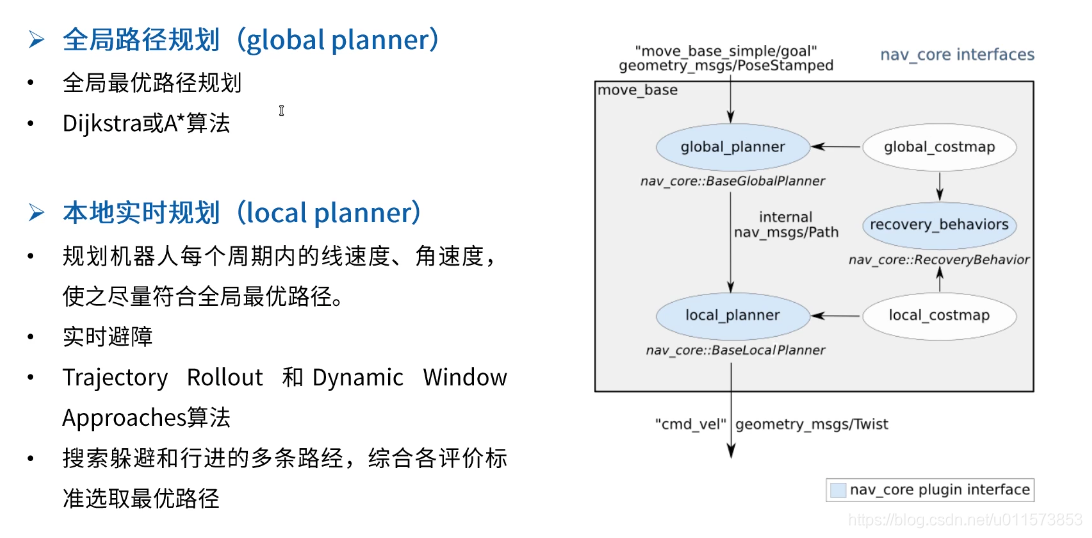
ROS自主导航