该项目是参加2019届全国大学生FPGA大赛的作品,系统主要实现视频任意角度旋转。利用国产的紫光同创公司的FPGA芯片作为开发平台,视频图像从摄像头实时采集,经过算法旋转后,通过hdmi接口显示。该项目最终晋级决赛,并获得紫光同创企业特别奖。
https://github.com/WayneGong/00_Image_Rotate
该项目的工程源代码,详细的文档说明,MATLAB仿真代码。
FPGA图像旋转的工程文件,请自行访问查看。
一,图像旋转原理
图像旋转是指图像按照某个位置转动一定角度的过程,旋转中图像仍保持这原始尺寸。图像旋转后图像的水平对称轴、垂直对称轴及中心坐标原点都可能会发生变换,因此需要对图像旋转中的坐标进行相应转换。
如图,原图像经过顺时针旋转角度为 θ 后,源图像的坐标为 P0 ( Xo, Yo ) 的点移动到了 P1(X1, Y1)。
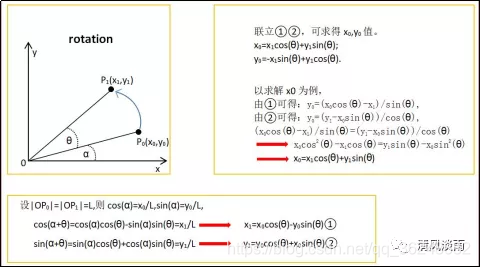
经过推导,可以得到上述的 P0 和P1 的坐标变换关系式。
二,MATLAB仿真
方案一:【正向预设】从原图映射到目标图像
在此方案中,实现代码的方式是正向的思路,将原图中的像素点的坐标进行坐标的旋转,然后直接幅值到输出的图像中,此方案旨在找到输入坐标与输出坐标之间的代数对应关系。
在该方法中,首先将原始坐标以及目标坐标放入了极坐标中,并且通过在极坐标中的关系,找到了同时满足X0,Y0,X1,Y1四个参量的方程组,以此来解出对应的坐标关系,并以此为基础得到了输入与输出之间的矩阵运算关系如下:

Matlab代码实现如下:
clear all
clc
% 读入图片
im = imread('1.jpg');
figure;
imshow(im);
% 求出旋转矩阵
a = 40 / 180 * pi;
R = [cos(a), -sin(a); sin(a), cos(a)];
% 求出图片大小 ch为通道数 h为高度 w为宽度
sz = size(im);
h = sz(1);
w = sz(2);
ch = sz(3);
c = [h; w] / 2;
% 初始化结果图像
im2 = uint8(zeros(h, w, 3));
for k = 1:ch
for i = 1:h
for j = 1:w
p = [i; j];
% round为四舍五入
pp = round(R*(p-c)+c);
if (pp(1) >= 1 && pp(1) <= h && pp(2) >= 1 && pp(2) <= w)
im2(pp(1), pp(2), k) = im(i, j, k);
end
end
end
end
% 显示图像
figure;
imshow(im2);
但在实际的测试中发现,这种方法所旋转得到的图像有着较为严重的失真现象,具体情况如下图所示:

 原图
原图
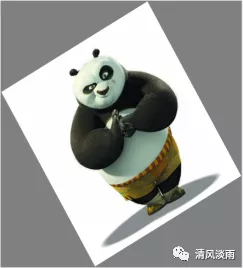
 旋转后的图像
旋转后的图像
很明显可以看到,在旋转之后这两张图片出现了较大的差别,首先是原图像被裁减了,其次是目标图像中有较多的瑕点(杂点)。究其原因在于,从原图旋转后得到的目标图像的像素位置在原图中找不到。另外就是边缘被裁剪的问题,由于在这个方案中约束了显示区域,因此在旋转的过程中,部分像素点就会由于超出边界而被裁剪。针对以上的两个问题,进行了如下改进。
方案二:【逆向预设】从目标图像映射到原图
由于在之前的方案中出现了杂点以及图像边缘裁剪的问题,因此在本方案中,我们采用了逆向思维,用目标图像的坐标去与原图的坐标进行坐标匹配,若在原图像中能找到匹配的图像,就显示该点旋转后的点坐标,若在原图中找不到该点,则不显示该点,通过这样就解决了杂点的问题。
其中,pp为旋转在后的坐标对应矩阵,在if语句中限定了原图的区域,用此区域则可以到原图中的坐标点,以此来排除不在区域中的坐标点,这样就可以解决杂点的问题。
在这种方案下,坐标的对应关系如下:

MATLAB仿真代码如下:
clear all
clc
% 读入图片
im = imread('1.jpg');
figure;
imshow(im);
% 求出旋转矩阵
a = 20 / 180 * pi;
R = [cos(a), sin(a); -sin(a), cos(a)];
% 求出图片大小 ch为通道数 h为高度 w为宽度
sz = size(im);
h = sz(1);
w = sz(2);
ch = sz(3);
c = [w;h] /2;
% 初始化结果图像
im2 = uint8(zeros(h, w, 3));
for k = 1:ch %遍历输出图像所有位置的像素
for i = 1:h
for j = 1:w
p = [j; i]; % p :输出图像的像素坐标
% round为四舍五入
pp = round(R*(p-c)+c); %pp :对应到输入图像的像素坐标
%逆向进行像素的查找
if (pp(1) >= 1 && pp(1) <= w && pp(2) >= 1 && pp(2) <= h)
im2(i, j, k) = im(pp(2), pp(1), k);
end
end
end
end
% 显示图像
figure;
imshow(im2);
这样,该旋转后的图像就有了较好的还原度,达到了相应的题目要求,具体的方案的效果如下图所示:
 原图
原图
 旋转后的图像
旋转后的图像
如图所示,相对方案一而言,图像的效果就好了很多,但图像边缘仍然存在边缘被切割的现象。
方案三:
考虑到未对旋转后的图像进行显示区域的划分,因此此类旋转只是对单一像素点的旋转,然后在原图像的显示区域上进行坐标点的重新组合,得到显示的图像。在解决的方法的思路上,采用目标显示区域的重新划分来解决该问题。
具体思路是,采用原图像的长宽作为基准,再用坐标转换的关系,将长和宽转换到旋转后的坐标系中,得到目标图像在旋转后坐标系中的显示区域,代码具体如下:
% 读入图片
im = imread('1.jpg');
figure;
imshow(im);
% 求出旋转矩阵
a = 30 / 180 * pi;
R = [cos(a), -sin(a); sin(a), cos(a)];
R = R'; % 求出旋转矩阵的逆矩阵进行逆向查找
% 计算原图大小
sz = size(im);
h = sz(1);
w = sz(2);
ch = sz(3);
c1 = [h; w] / 2;
% 计算显示完整图像需要的画布大小
hh = floor(w*sin(a)+h*cos(a))+1;
ww = floor(w*cos(a)+h*sin(a))+1;
c2 = [hh; ww] / 2;
% 初始化目标画布
im2 = uint8(ones(hh, ww, 3)*128);
for k = 1:ch
for i = 1:hh
for j = 1:ww
p = [i; j];
pp = (R*(p-c2)+c1);
mn = floor(pp);
ab = pp - mn;
a = ab(1);
b = ab(2);
m = mn(1);
n = mn(2);
% 线性插值方法
if (pp(1) >= 2 && pp(1) <= h-1 && pp(2) >= 2 && pp(2) <= w-1)
im2(i, j, k) = (1-a)*(1-b)*im(m, n, k) + a*(1-b)*im(m+1, n, k)...
+ (1-a)*b*im(m, n, k) + a*b*im(m, n, k);
end
end
end
end
% 显示图像
figure;
imshow(im2);
这样,就解决了图像边缘被裁剪的问题,是整个图像得以完整的显示,实际的效果如下
 原图
原图
 旋转后的图像
旋转后的图像
从图示的效果可以看出,边缘区域被裁剪的问题被解决了,但问题是图片加阴影的区域面积比原图大很多。
综合以上三种方案,结合实际需求,由于我们的显示是在一块固定大小的屏幕上进行显示,整个图像的显示范围有限,采用CORDIC算法进行坐标变换产生的延时太大。最终基于处理速度和资源占用的均衡考虑,最终选择方案二作为我们图像旋转的设计方案。
三,旋转坐标计算
在该设计中,要求图像拥有0到360的任意角度的旋转,坐标变换需要角度的正弦和余弦值。
利用matlab生成正余弦表,并将其扩大256倍,打印到文件中。利用得到的正余弦表数值,将其写入verilog代码中,生成正余弦查找表。通过输入角度值来索引其正余弦数值。Matlab生成正余弦列表的代码如下;
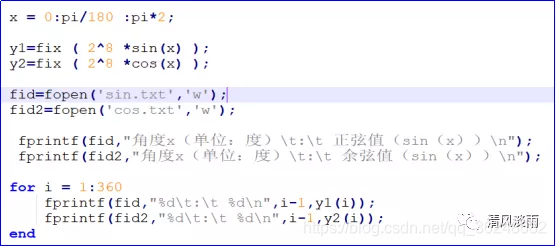
该正弦,余弦通过MATLAB计算得到,并预先储存到FPGA的片上储存空间中,在进行坐标变换时,读取对应角度的正弦,余弦值,进行坐标变换。由于计算得到的正弦和余弦值为浮点数,而FPGA擅长于进行整数运算。故要进行浮点数到整数的转换,具体的实现方法是,将计算得到的浮点正弦,余弦值乘上 256 后再取整,计算得到的结果于原结果相比被扩大了256倍,而在数字电路中,除法操作可以用移位来进行。结果右移8位即等效于除于256 。
坐标变换的核心代码如下:

将坐标变换计算模块封装为一个子模块,输入输出图像的坐标和旋转角度后,即可计算出对应的输入图像对应的像素的坐标。然后读取该坐标的像素值,写入到旋转重建的图像对应的坐标位置即可。
四,效果展示(Results show)
0.原图 (正常显示)

1,顺时针旋转22度

2,顺时针旋转90度

3,顺时针旋转270度

4,顺时针旋转341度

