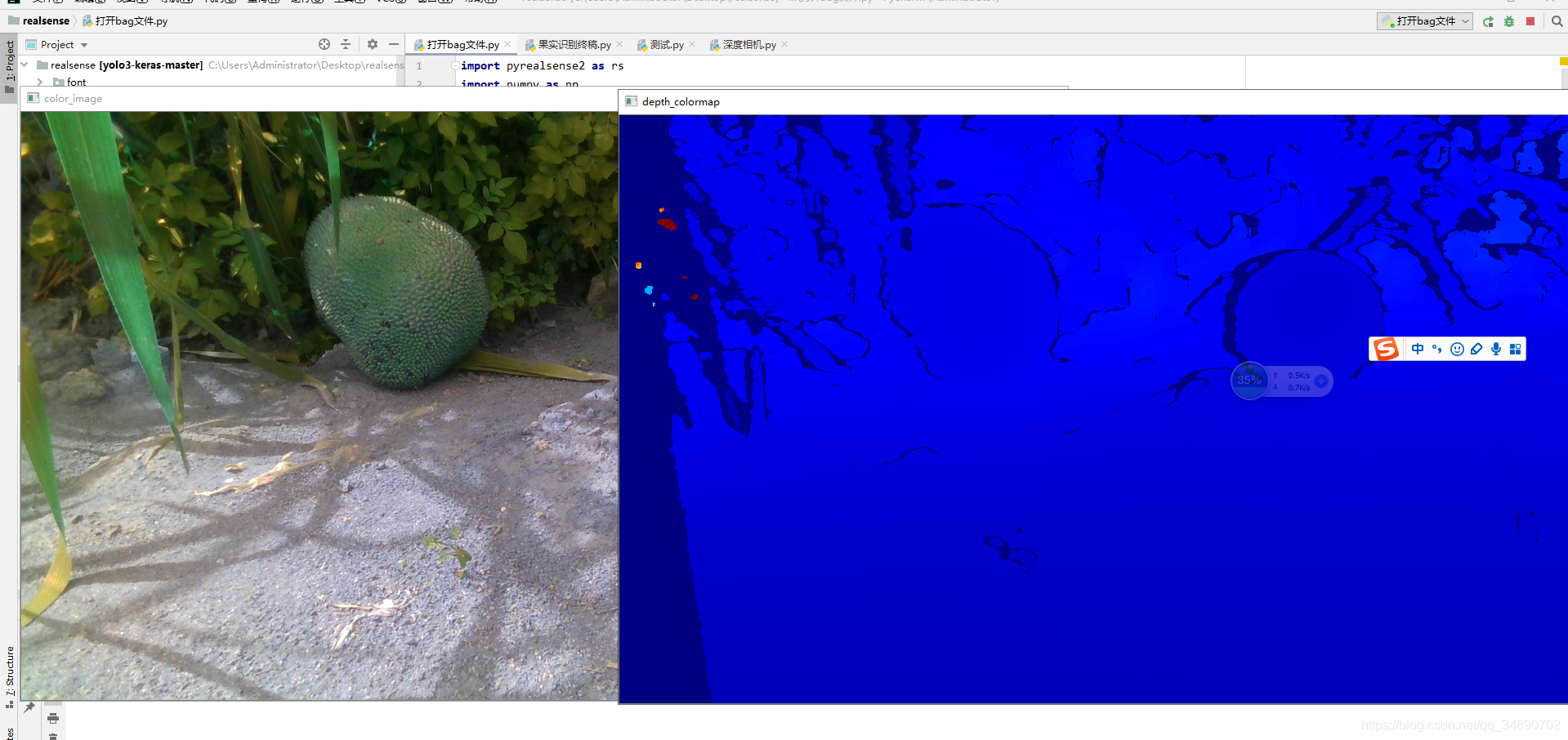
如何用Python打开realsenseD435相机
import pyrealsense2 as rs
import numpy as np
import cv2
if __name__ == "__main__":
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_device_from_file("666.bag")#这是打开相机录制的视频
# config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)这是打开相机
#config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
# Start streaming
pipeline.start(config)
try:
while True:
# Wait for a coherent pair of frames: depth and color
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
# Convert images to numpy arrays
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
# Apply colormap on depth image (image must be converted to 8-bit per pixel first)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)
# Stack both images horizontally
images = np.hstack((color_image, depth_colormap))
# Show images
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
key = cv2.waitKey(1)
# Press esc or 'q' to close the image window
if key & 0xFF == ord('q') or key == 27:
cv2.destroyAllWindows()
break
finally:
# Stop streaming
pipeline.stop()
如何用Python获取深度相机参数
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
pipeline.start(config)
# 创建对齐对象(深度对齐颜色)
align = rs.align(rs.stream.color)
try:
while True:
frames = pipeline.wait_for_frames()
# 获取对齐帧集
aligned_frames = align.process(frames)
# 获取对齐后的深度帧和彩色帧
aligned_depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
# 获取颜色帧内参
color_profile = color_frame.get_profile()
cvsprofile = rs.video_stream_profile(color_profile)
color_intrin = cvsprofile.get_intrinsics()
color_intrin_part = [color_intrin.ppx, color_intrin.ppy, color_intrin.fx, color_intrin.fy]
print(color_intrin_part)
# [318.48199462890625, 241.16720581054688, 616.5906372070312, 616.7650146484375]
if not aligned_depth_frame or not color_frame:
continue
finally:
pipeline.stop()

