这是一篇安装ROS踩坑后,解决问题的集合。
Ubuntu 18.04 安装ROS Melodic安装参考教程:https://blog.csdn.net/zhangrelay/article/details/80241758
问题1
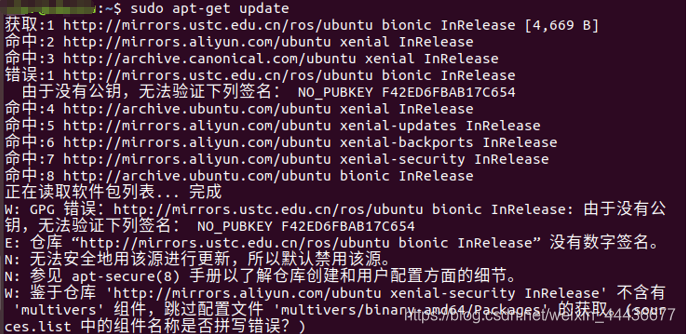
sudo apt-get update 报错
W: GPG 错误:https://mirrors.ustc.edu.cn/ros/ubuntu xenial InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
W: 仓库 “https://mirrors.ustc.edu.cn/ros/ubuntu xenial InRelease” 没有数字签名。
解决办法:
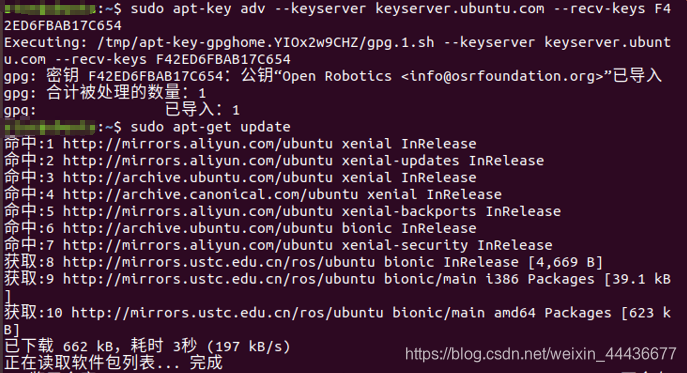
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654 (后面这串签名换成报错的签名)
然后再次执行更新命令 sudo apt-get update
参考:https://blog.csdn.net/suyunzzz/article/details/96717770
问题2
sudo apt-get update 报错/警告。忽视该警告的话会导致后面安装ROS时无法下载部分组件。
W: 鉴于仓库 'http://mirrors.aliyun.com/ubuntu xenial-security InRelease
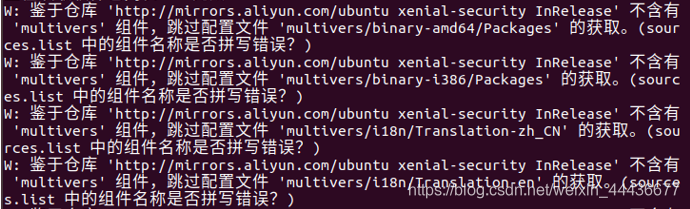
解决办法:换源!!!因为之前换源都是直接修改/etc/apt/sources.list,导致一段时间就要更新,也太麻烦了。后面发现可以从软件和更新里面换源比较省事。换源教程较多,在这就不赘诉了。可参看:https://blog.csdn.net/weixin_44436677/article/details/105152284
问题3
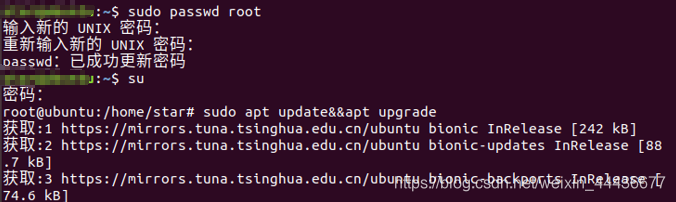
换源后,apt -update报错:(13:权限不够)。

解决办法:
udo passwd root重新设置一下密码。获得权限后,再输入apt update更新一下。
问题4
初始化rosdep报错
ModuleNotFoundError: No module named ‘rosdep2’
解决办法:
可能是因为默认python版本的问题。因为之前学习使用opencv,将Ubuntu18.04中python默认版本改成了python3.6。现在要将其改回python2的版本。
先使用命令:python --version查看python的版本。
我这显示了3.6版本,然后查找python2在哪儿,使用命令:whereis 2.7

使用命令: rm /user/bin/python删除原有的python连接文件。有可能会显示无法删除,权限不够等提示。则进入root模式,再次使用该命令。

然后建立python2.7的软连接:ln -s /usr/bin/python2.7 /usr/bin/python

最后把路径加入环境变量:PATH=/usr/bin:$PATH

再次查看python默认版本,修改成功。

