针孔相机模型:
照片记录了真实世界在平面上的投影。
丢失了距离上的信息。
普通相机可以用针孔模型近似。
针孔相机模型:
点P通过相机光心,在成相平面成了一个像P’。

我们可以通过相似三角形原理,得出:

上图中[图5-1中]我们得到的是倒立的像,但在实际生活中,我们一般会把这个像翻转过来,所以翻转到前面后,我们可以得到新的公式:

整理两个公式,我们可以得到:

物理成相平面的中心并不一定在该平面的中心,同时,在成像过程中还存在着一定的缩放,所以我们得到新的关系:

我们将上方的式子,带到原有的公式:
得到新的关系:

用矩阵表达出来是这样的:

中间的矩阵叫做内参数矩阵,我们认为,相机出场时内参就是固定的,右边的[X,Y,Z]T是非其次坐标。
如果你对图像进行了剪裁、缩放、平移等等操作的话,那么内参矩阵会发生一些变化。

P从世界矩阵变化到相机坐标:

这里 R, t 或 T 称为外参,外参也是SLAM估计的目标。
右侧式子隐含了一次非齐次到齐次的变换。
个人见解:上式中,相机内参矩阵描述了因相机的缩放、平移等操作对实际的影响,而R、t矩阵,也就是旋转平移矩阵T,描述的是相机姿态、方位对相机坐标系下的点的坐标与世界坐标系下点的坐标的影响。真实世界的坐标,在经过两次矩阵变换后,映射到了相机平面内,被刻画到相机坐标系中。
畸变

原本小孔成像模型中,我们的光线都是沿着直线传播的,但是由于相机的结构中存在着一些光学透镜,导致成像后的图像发生了扭曲,原本直立的高楼变得扭曲,上面的图片就是广角镜头产生畸变时的效果。

除了这两种畸变外,还有一种切向畸变

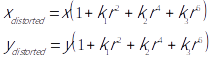
径向畸变可以用归一化坐标的变换来描述:
切向畸变:
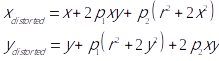
放在一起,可以保留各项系数:

小结
1.首先,世界坐标下有一个固定的点P,世界坐标为
2.由于相机在运动,他的运动由R、t或变换矩阵T来描述,P的相机坐标为:
3.这时的P‘c有三个量,把他们投影到归一化平面Z=1上,得到P的归一化相机坐标:Pc=[X/Z,Y/Z,1]
4.对归一化的坐标进行畸变处理
5.最后,对应到他的像素坐标:
双目相机
左右相机中心距离称为基线

左右像素的几何关系:

整理得到:

RGB-D相机:物理手段测量深度
ToF或结构光两种主要原理
通常能得到与RGB图对应的深度图

