Bush
此软件主要来向机器人传编译好的代码,以及部分Config目录下的文件

图中的上面一排1-6的编号为Player,是机器人在Game中的号码,不同于机器人穿的队服上的编号,其中1号必为守门员且必须上场,其余不限。将需要传输代码的机器人打勾后,确认上面Device是否与机器人状态相同,图中绿色为机器人此时通过Wlan连接,后面为延迟181ms,power为电量百分比。logs为机器人的日志部分,一般deploy一次后logs+1,当日志文件太多时,deploy时会报错,此时delete logs之后可再次传输代码
ssh用来连接机器人,一般直接在终端中使用,参考链接:https://blog.csdn.net/qq_34062822/article/details/80333101
simulator用来连接实体机器人,可以查看实体机器人的信息。对应simrobot的remoterobot.ros2环境,在此系列的机器人校准这一篇博客介绍
GameController
首先在github上搜索bhuman,进入主目录,可以看到GameController,参考链接:https://github.com/bhuman
可点进去下载,将其解压后放置在电脑上bhuman目录下,此时无build目录
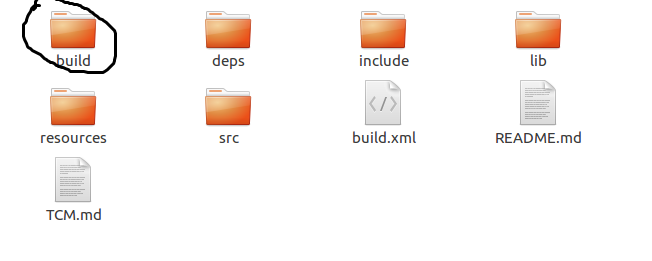
首先要下载ant模块,连接互联网,打开终端 sudo apt install ant

然后在Gamecontroller目录下邮右键打开终端,输入 ant

这样就会生成build目录,进入build/jar/config/spl,添加自己队伍的图片,以队号命名,如图所示
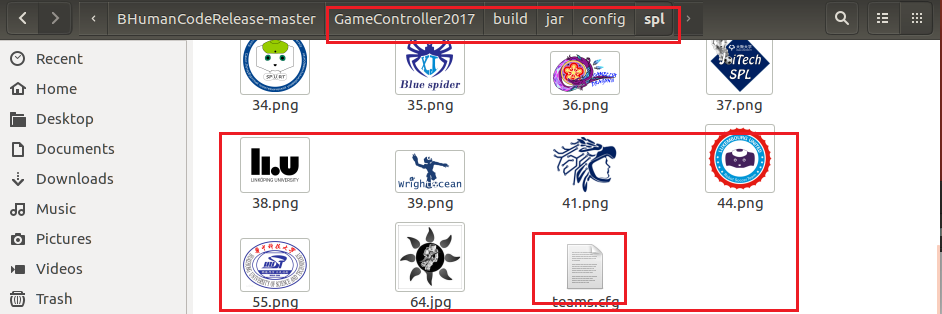
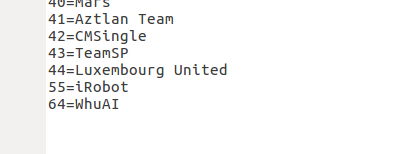
然后打开teams.cfg文件添加自己队伍信息,如下图所示
然后确认自己队伍的端口号是否一致,修改位置参考:https://blog.csdn.net/qq_34062822/article/details/80326273

这样通过游戏控制器才能连接到机器人
进入build的jar目录,右键打开终端,输入如图所示指令,即可打开游戏控制器

选择比赛队伍信息
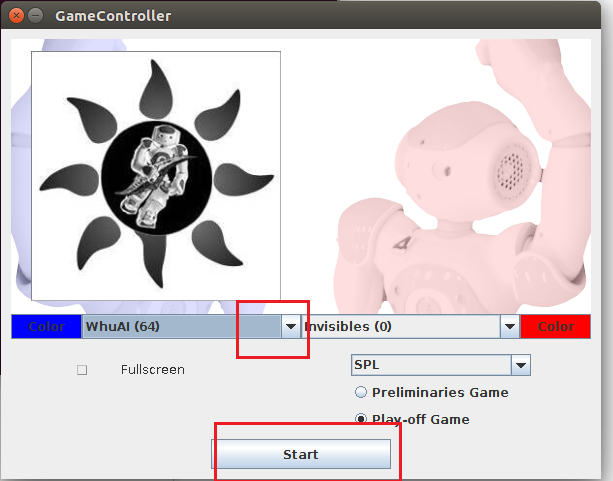

比赛时,由于人手不够,参赛队伍需要出人做裁判,届时会有培训,有使用此软件的细则