LeNet5里包含了卷积层,池化层以及全连接层,相比DNN只有全连接层来说,稍微复杂了一些,但是效果却要比DNN好。下面我们来分析一下。
DNN网络:
-
网络结构不够灵活
图片的大小决定了输入层的节点个数,假如图片大小是1616,那么输入层有256个节点,但是如今的图片越来越大,换成100100大小的图片来做相同的任务,只有通过增加每层的神经元个数或者增加网络的层数来完成。 -
网络中参数太多
还是刚刚的例子,输入一个大小为1616的图片,输入层为256个节点,隐藏层每层1000个节点,输出层10个。假设共5层,则共需要学习:(256103+106+106+104 )个w再加( 1000+ 1000+ 1000+10 )个b
换成更大的图片时,这个参数是非常庞大的
因此,为了解决以上问题,卷积神经网络就诞生了:

- 卷积层:

左边是一张66大小的单通道图片,它跟一个33的过滤器filter卷积,其过程是(默认步长为1):

因为步长为1,所以下一步是这样的:

最终,一张6 * 6的图片会变成一张4 * 4的输出
如果卷积核的个数为3,那么你将获得三个特征的输出:

换句话说,一个卷积核可以提取图像的一种特征,多个卷积核可以提取多种特征
- 池化层:
我们知道,一张图片,不管放大还是缩小,都不影响我们判断这张图表达的含义:


就像这两张图,虽然第一张图比第二张图小了很多,但是我们都认得出这两张图是苹果
因此,Pooling层的作用就是缩减输出的尺寸,这一步也叫做下采样
池化层大小为2*2,步长为2时:

池化有两种方法,一种是取最大值,另一种是取平均值
3.全连接层:
最后通过全连接层,输出结果,这里需要注意的是:
- input_dim要等于矩阵的列数
- output_dim等于标签数
下面一起来看一下代码:
#定义LeNet5网络
class MyLeNet(fluid.dygraph.Layer):
def __init__(self):
super(MyLeNet,self).__init__()
self.hidden1_1 = Conv2D(num_channels=1, num_filters=28, filter_size=5, act='relu')
self.hidden1_2 = Pool2D(pool_size=2, pool_stride=1, pool_type='max')
self.hidden2_1 = Conv2D(num_channels=28, num_filters=32, filter_size=3, act='relu')
self.hidden2_2 = Pool2D(pool_size=2, pool_stride=1, pool_type='max')
self.hidden3 = Conv2D(num_channels=32, num_filters=32, filter_size=3, act='relu')
self.hidden4 = Linear(input_dim=32*10*10, output_dim=65, act='softmax')
def forward(self,input):
# print(input.shape)
x = self.hidden1_1(input)
# print(x.shape)
x = self.hidden1_2(x)
# print(x.shape)
x = self.hidden2_1(x)
# print(x.shape)
x = self.hidden2_2(x)
# print(x.shape)
x = self.hidden3(x)
# print(x.shape)
x = fluid.layers.reshape(x, shape=[-1, 32*10*10])
# print(x.shape)
y = self.hidden4(x)
# print(y.shape)
return y
把print输出的注释取消可以看到图片的shape:
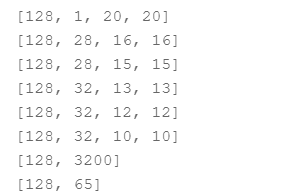
这里详细解释一下:
- 输入的图片是[128,1,20,20],128是batch_size,即一个批量放128张图片,1指的是单通道,即灰白图片,两个28是图片的大小是20*20
- 进入了卷积层(num_channels=1, num_filters=28, filter_size=5)后,变成了[128,28,16,16],128图片是不会少的,所以128在接下来的层中是一直不变的,num_filters是卷积核的个数,有多少个卷积核就提取多少个特征,因此这里的28指的是特征数,卷积核的大小是5*5,步长默认为1,因此,输出了20-5+1=16,不会算的话,画出来就知道了,另外,由于这张图是单通道的,因此num_channels=1
- 下面是池化层(pool_size=2, pool_stride=1, pool_type=‘max’),从池化层输出的shape是[128,28,15,15],池化层不会改变原有特征,因此128和28都不变,池化层大小pool_size为2,步长为1,通过计算16-2+1=15,因此图片变成了15*15
- 经过三个卷积层,两个池化层后,不难算出此时图片的shape变成了[128,32,10,10],为了输入全连接层(input_dim=32 * 10 * 10, output_dim=65),这里做了一个矩阵变换:x = fluid.layers.reshape(x, shape=[-1, 32 * 10 * 10]),因此图片的shape变成了[128,3200]
- 图片经过output_dim=65的全连接层后,3200就变成了标签总数,即65
下面是程序的完整代码:
#导入需要的包
import numpy as np
import paddle as paddle
import paddle.fluid as fluid
from PIL import Image
import cv2
import matplotlib.pyplot as plt
import os
from multiprocessing import cpu_count
from paddle.fluid.dygraph import Pool2D,Conv2D
# from paddle.fluid.dygraph import FC
from paddle.fluid.dygraph import Linear
# 生成车牌字符图像列表
data_path = '/home/aistudio/data'
character_folders = os.listdir(data_path)
label = 0
LABEL_temp = {}
if(os.path.exists('./train_data.list')):
os.remove('./train_data.list')
if(os.path.exists('./test_data.list')):
os.remove('./test_data.list')
for character_folder in character_folders:
with open('./train_data.list', 'a') as f_train:
with open('./test_data.list', 'a') as f_test:
if character_folder == '.DS_Store' or character_folder == '.ipynb_checkpoints' or character_folder == 'data23617':
continue
print(character_folder + " " + str(label))
LABEL_temp[str(label)] = character_folder #存储一下标签的对应关系
character_imgs = os.listdir(os.path.join(data_path, character_folder))
for i in range(len(character_imgs)):
if i%10 == 0:
f_test.write(os.path.join(os.path.join(data_path, character_folder), character_imgs[i]) + "\t" + str(label) + '\n')
else:
f_train.write(os.path.join(os.path.join(data_path, character_folder), character_imgs[i]) + "\t" + str(label) + '\n')
label = label + 1
print('图像列表已生成')
# 用上一步生成的图像列表定义车牌字符训练集和测试集的reader
def data_mapper(sample):
img, label = sample
img = paddle.dataset.image.load_image(file=img, is_color=False)
img = img.flatten().astype('float32') / 255.0
return img, label
def data_reader(data_list_path):
def reader():
with open(data_list_path, 'r') as f:
lines = f.readlines()
for line in lines:
img, label = line.split('\t')
yield img, int(label)
return paddle.reader.xmap_readers(data_mapper, reader, cpu_count(), 1024)
# 用于训练的数据提供器
train_reader = paddle.batch(reader=paddle.reader.shuffle(reader=data_reader('./train_data.list'), buf_size=512), batch_size=128)
# 用于测试的数据提供器
test_reader = paddle.batch(reader=data_reader('./test_data.list'), batch_size=128)
#定义LeNet5网络
class MyLeNet(fluid.dygraph.Layer):
def __init__(self):
super(MyLeNet,self).__init__()
self.hidden1_1 = Conv2D(num_channels=1, num_filters=28, filter_size=5, act='relu')
self.hidden1_2 = Pool2D(pool_size=2, pool_stride=1, pool_type='max')
self.hidden2_1 = Conv2D(num_channels=28, num_filters=32, filter_size=3, act='relu')
self.hidden2_2 = Pool2D(pool_size=2, pool_stride=1, pool_type='max')
self.hidden3 = Conv2D(num_channels=32, num_filters=32, filter_size=3, act='relu')
self.hidden4 = Linear(input_dim=32*10*10, output_dim=65, act='softmax')
def forward(self,input):
# print(input.shape)
x = self.hidden1_1(input)
# print(x.shape)
x = self.hidden1_2(x)
# print(x.shape)
x = self.hidden2_1(x)
# print(x.shape)
x = self.hidden2_2(x)
# print(x.shape)
x = self.hidden3(x)
# print(x.shape)
x = fluid.layers.reshape(x, shape=[-1, 32*10*10])
# print(x.shape)
y = self.hidden4(x)
# print(y.shape)
return y
with fluid.dygraph.guard():
model=MyLeNet() #模型实例化
model.train() #训练模式
opt=fluid.optimizer.SGDOptimizer(learning_rate=0.001, parameter_list=model.parameters())#优化器选用SGD随机梯度下降,学习率为0.001.
epochs_num=20 #迭代次数为2
for pass_num in range(epochs_num):
for batch_id,data in enumerate(train_reader()):
images=np.array([x[0].reshape(1,20,20) for x in data],np.float32)
# print(images)
labels = np.array([x[1] for x in data]).astype('int64')
labels = labels[:, np.newaxis]
image=fluid.dygraph.to_variable(images)
label=fluid.dygraph.to_variable(labels)
# print(image.shape)
predict=model(image)#预测
loss=fluid.layers.cross_entropy(predict,label)
avg_loss=fluid.layers.mean(loss)#获取loss值
acc=fluid.layers.accuracy(predict,label)#计算精度
if batch_id!=0 and batch_id%50==0:
print("train_pass:{},batch_id:{},train_loss:{},train_acc:{}".format(pass_num,batch_id,avg_loss.numpy(),acc.numpy()))
avg_loss.backward()
opt.minimize(avg_loss)
model.clear_gradients()
fluid.save_dygraph(model.state_dict(),'MyLeNet')#保存模型
#模型校验
with fluid.dygraph.guard():
accs = []
model=MyLeNet()#模型实例化
model_dict,_=fluid.load_dygraph('MyLeNet')
model.load_dict(model_dict)#加载模型参数
model.eval()#评估模式
for batch_id,data in enumerate(test_reader()):#测试集
images=np.array([x[0].reshape(1,20,20) for x in data],np.float32)
labels = np.array([x[1] for x in data]).astype('int64')
labels = labels[:, np.newaxis]
image=fluid.dygraph.to_variable(images)
label=fluid.dygraph.to_variable(labels)
predict=model(image)#预测
acc=fluid.layers.accuracy(predict,label)
accs.append(acc.numpy()[0])
avg_acc = np.mean(accs)
print(avg_acc)
# 对车牌图片进行处理,分割出车牌中的每一个字符并保存
license_plate = cv2.imread('./车牌.png')
gray_plate = cv2.cvtColor(license_plate, cv2.COLOR_RGB2GRAY)
ret, binary_plate = cv2.threshold(gray_plate, 175, 255, cv2.THRESH_BINARY)
result = []
for col in range(binary_plate.shape[1]):
result.append(0)
for row in range(binary_plate.shape[0]):
result[col] = result[col] + binary_plate[row][col]/255
character_dict = {}
num = 0
i = 0
while i < len(result):
if result[i] == 0:
i += 1
else:
index = i + 1
while result[index] != 0:
index += 1
character_dict[num] = [i, index-1]
num += 1
i = index
for i in range(8):
if i==2:
continue
padding = (170 - (character_dict[i][1] - character_dict[i][0])) / 2
ndarray = np.pad(binary_plate[:,character_dict[i][0]:character_dict[i][1]], ((0,0), (int(padding), int(padding))), 'constant', constant_values=(0,0))
ndarray = cv2.resize(ndarray, (20,20))
cv2.imwrite('./' + str(i) + '.png', ndarray)
def load_image(path):
img = paddle.dataset.image.load_image(file=path, is_color=False)
img = img.astype('float32')
img = img[np.newaxis, ] / 255.0
return img
#将标签进行转换
print('Label:',LABEL_temp)
match = {'A':'A','B':'B','C':'C','D':'D','E':'E','F':'F','G':'G','H':'H','I':'I','J':'J','K':'K','L':'L','M':'M','N':'N',
'O':'O','P':'P','Q':'Q','R':'R','S':'S','T':'T','U':'U','V':'V','W':'W','X':'X','Y':'Y','Z':'Z',
'yun':'云','cuan':'川','hei':'黑','zhe':'浙','ning':'宁','jin':'津','gan':'赣','hu':'沪','liao':'辽','jl':'吉','qing':'青','zang':'藏',
'e1':'鄂','meng':'蒙','gan1':'甘','qiong':'琼','shan':'陕','min':'闽','su':'苏','xin':'新','wan':'皖','jing':'京','xiang':'湘','gui':'贵',
'yu1':'渝','yu':'豫','ji':'冀','yue':'粤','gui1':'桂','sx':'晋','lu':'鲁',
'0':'0','1':'1','2':'2','3':'3','4':'4','5':'5','6':'6','7':'7','8':'8','9':'9'}
L = 0
LABEL ={}
for V in LABEL_temp.values():
LABEL[str(L)] = match[V]
L += 1
print(LABEL)
#构建预测动态图过程
with fluid.dygraph.guard():
model=MyLeNet()#模型实例化
model_dict,_=fluid.load_dygraph('MyLeNet')
model.load_dict(model_dict)#加载模型参数
model.eval()#评估模式
lab=[]
for i in range(8):
if i==2:
continue
infer_imgs = []
infer_imgs.append(load_image('./' + str(i) + '.png'))
infer_imgs = np.array(infer_imgs)
infer_imgs = fluid.dygraph.to_variable(infer_imgs)
result=model(infer_imgs)
lab.append(np.argmax(result.numpy()))
# print(lab)
display(Image.open('./车牌.png'))
print('\n车牌识别结果为:',end='')
for i in range(len(lab)):
print(LABEL[str(lab[i])],end='')
来看一下效果:

