分水岭算法主要用于图像分段,通常是把一副彩色图像灰度化,然后再求梯度图,最后在梯度图的基础上进行分水岭算法,求得分段图像的边缘线。
下面左边的灰度图,可以描述为右边的地形图,地形的高度是由灰度图的灰度值决定,灰度为0对应地形图的地面,灰度值最大的像素对应地形图的最高点。
")

我们可以自己编程实现灰度图的地形图显示,工程FirstOpenCV6就实现了简单的这个功能,比如上边的灰度图,显示为:

对灰度图的地形学解释,我们我们考虑三类点:
1. 局部最小值点,该点对应一个盆地的最低点,当我们在盆地里滴一滴水的时候,由于重力作用,水最终会汇聚到该点。注意:可能存在一个最小值面,该平面内的都是最小值点。
2. 盆地的其它位置点,该位置滴的水滴会汇聚到局部最小点。
3. 盆地的边缘点,是该盆地和其它盆地交接点,在该点滴一滴水,会等概率的流向任何一个盆地。

假设我们在盆地的最小值点,打一个洞,然后往盆地里面注水,并阻止两个盆地的水汇集,我们会在两个盆地的水汇集的时刻,在交接的边缘线上(也即分水岭线),建一个坝,来阻止两个盆地的水汇集成一片水域。这样图像就被分成2个像素集,一个是注水盆地像素集,一个是分水岭线像素集。
下面的gif图很好的演示了分水岭算法的效果:
")
")
在真实图像中,由于噪声点或者其它干扰因素的存在,使用分水岭算法常常存在过度分割的现象,这是因为很多很小的局部极值点的存在,比如下面的图像,这样的分割效果是毫无用处的。


为了解决过度分割的问题,可以使用基于标记(mark)图像的分水岭算法,就是通过先验知识,来指导分水岭算法,以便获得更好的图像分段效果。通常的mark图像,都是在某个区域定义了一些灰度层级,在这个区域的洪水淹没过程中,水平面都是从定义的高度开始的,这样可以避免一些很小的噪声极值区域的分割。
下面的gif图很好的演示了基于mark的分水岭算法过程:



上面的过度分段图像,我们通过指定mark区域,可以得到很好的分段效果:


下面利用分水岭算法进行硬币个数的检测:
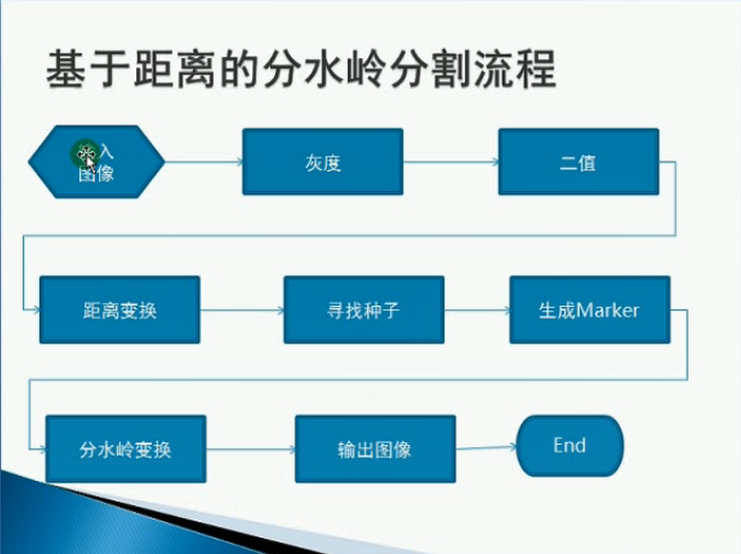
分水岭分割实现的步骤:
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("coins.jpg");
if (!src.data)
{
printf("could not load image...\n");
return -1;
}
imshow("src", src);
Mat Gray, shifted, binary;
//均值漂移Meanshift
pyrMeanShiftFiltering(src, shifted, 21, 51);
imshow("shifted", shifted);
//转换成灰度图像
cvtColor(shifted, Gray, CV_BGR2GRAY);
imshow("Gray", Gray);
//使用OTSU阈值算法进行二值化
threshold(Gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary", binary);
//距离变换
Mat DisTranMat(binary.rows, binary.cols, CV_32FC1);
distanceTransform(binary, DisTranMat, DistanceTypes::DIST_L2, 3);
//归一化
normalize(DisTranMat, DisTranMat, 0.0, 1.0, NORM_MINMAX);
imshow("DisTranMat", DisTranMat);
//在进行阈值化分割
threshold(DisTranMat, DisTranMat, 0.4, 1, THRESH_BINARY);
imshow("TDisTranMat", DisTranMat);
//归一化统计图像到0-255
normalize(DisTranMat, DisTranMat, 0.0, 255.0, NORM_MINMAX);
DisTranMat.convertTo(DisTranMat, CV_8UC1);
imshow("NorDisTranMat", DisTranMat);
//进行计算标记的分割块
vector<vector<Point>> contours;//vector<Point>点的集合,一系列的点组成轮廓的集合
vector<Vec4i> hierarchy;
findContours(DisTranMat, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t t = 0; t < contours.size(); t++)
{
drawContours(markers, contours, static_cast<int>(t), Scalar::all(static_cast<int>(t) + 1), -1);//这里填充的颜色是从1开始
}
circle(markers, Point(5, 5), 3, Scalar(255), -1);
//imshow("markers", markers*10000);
//形态学腐蚀操作
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(src, src, MORPH_ERODE, k);
//完成分水岭算法
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
//取反
bitwise_not(mark, mark);
imshow("mark", mark);
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++)
{
for (int col = 0; col < markers.cols; col++)
{
index = markers.at<int>(row, col);//读取每一个部分的颜色的值
if (index > 0 && index <= contours.size())
{
dst.at<Vec3b>(row, col) = colors[index - 1];
}
else
{
dst.at<Vec3b>(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("Final Result", dst);
printf("number of objects : %d\n", contours.size());
waitKey(0);
return 0;
}
原图:

效果图:

检测到的硬币的个数:

参考的博客:
https://www.cnblogs.com/mikewolf2002/p/3304118.html
http://blog.csdn.net/iracer/article/details/49225823
https://www.cnblogs.com/wjy-lulu/p/7056466.html
http://blog.csdn.net/tangketan/article/details/39757513