前言
1.OpenCV没有内置的矩形检测的函数,如果想检测矩形,要自己去实现。
2.我这里使用的OpenCV版本是3.30.
矩形检测
1.得到原始图像之后,代码处理的步骤是:
(1)滤波增强边缘。
(2)分离图像通道,并检测边缘。
(3) 提取轮廓。
(4)使用图像轮廓点进行多边形拟合。
(5)计算轮廓面积并得到矩形4个顶点。
(6)求轮廓边缘之间角度的最大余弦。
(7)画出矩形。
2.代码
//检测矩形
//第一个参数是传入的原始图像,第二是输出的图像。
void findSquares(const Mat& image,Mat &out)
{
int thresh = 50, N = 5;
vector<vector<Point> > squares;
squares.clear();
Mat src,dst, gray_one, gray;
src = image.clone();
out = image.clone();
gray_one = Mat(src.size(), CV_8U);
//滤波增强边缘检测
medianBlur(src, dst, 9);
//bilateralFilter(src, dst, 25, 25 * 2, 35);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
//在图像的每个颜色通道中查找矩形
for (int c = 0; c < image.channels(); c++)
{
int ch[] = { c, 0 };
//通道分离
mixChannels(&dst, 1, &gray_one, 1, ch, 1);
// 尝试几个阈值
for (int l = 0; l < N; l++)
{
// 用canny()提取边缘
if (l == 0)
{
//检测边缘
Canny(gray_one, gray, 5, thresh, 5);
//膨脹
dilate(gray, gray, Mat(), Point(-1, -1));
imshow("dilate", gray);
}
else
{
gray = gray_one >= (l + 1) * 255 / N;
}
// 轮廓查找
//findContours(gray, contours, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
findContours(gray, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
vector<Point> approx;
// 检测所找到的轮廓
for (size_t i = 0; i < contours.size(); i++)
{
//使用图像轮廓点进行多边形拟合
approxPolyDP(Mat(contours[i]), approx, arcLength(Mat(contours[i]), true)*0.02, true);
//计算轮廓面积后,得到矩形4个顶点
if (approx.size() == 4 &&fabs(contourArea(Mat(approx))) > 1000 &&isContourConvex(Mat(approx)))
{
double maxCosine = 0;
for (int j = 2; j < 5; j++)
{
// 求轮廓边缘之间角度的最大余弦
double cosine = fabs(angle(approx[j % 4], approx[j - 2], approx[j - 1]));
maxCosine = MAX(maxCosine, cosine);
}
if (maxCosine < 0.3)
{
squares.push_back(approx);
}
}
}
}
}
for (size_t i = 0; i < squares.size(); i++)
{
const Point* p = &squares[i][0];
int n = (int)squares[i].size();
if (p->x > 3 && p->y > 3)
{
polylines(out, &p, &n, 1, true, Scalar(0, 255, 0), 3, LINE_AA);
}
}
imshow("dst",out);
}
static double angle(Point pt1, Point pt2, Point pt0)
{
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
return (dx1*dx2 + dy1*dy2) / sqrt((dx1*dx1 + dy1*dy1)*(dx2*dx2 + dy2*dy2) + 1e-10);
}
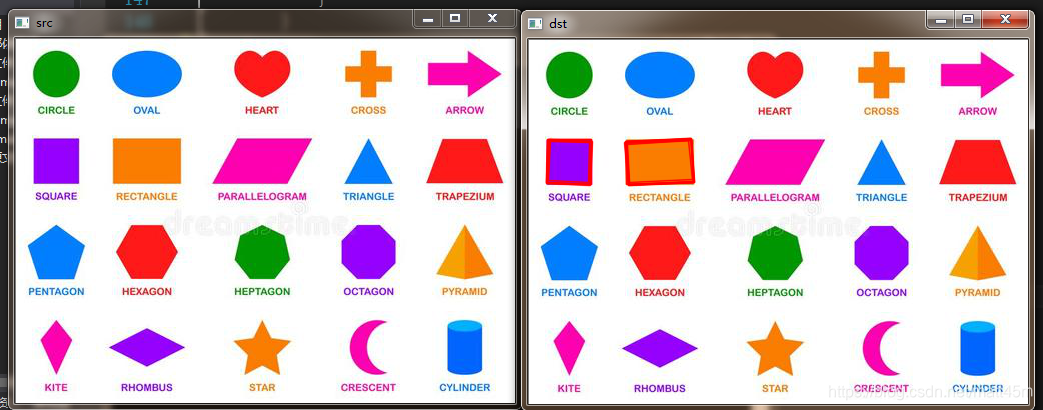
3.运行结果