1. RTK简介
RTK(Real Time Kinematic)可将GPS精度提高到厘米级。 它使用信号载波相位的测量值,而不是信号的信息内容,并依靠单个参考站提供实时校正,提供高达厘米级的定位精度。
一般是将一台接收机置于基准站上,另一台或几台接收机置于载体(称为移动站)上,基准站和移动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。然后将这个改正值通过无线电数据链电台及时传递给共视卫星的移动站精化其GPS观测值,从而得到经差分改正后移动站较准确的实时位置。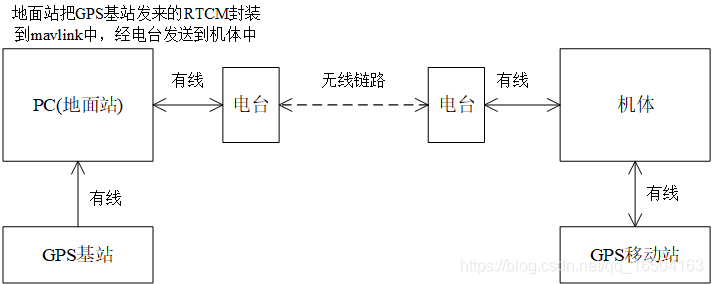
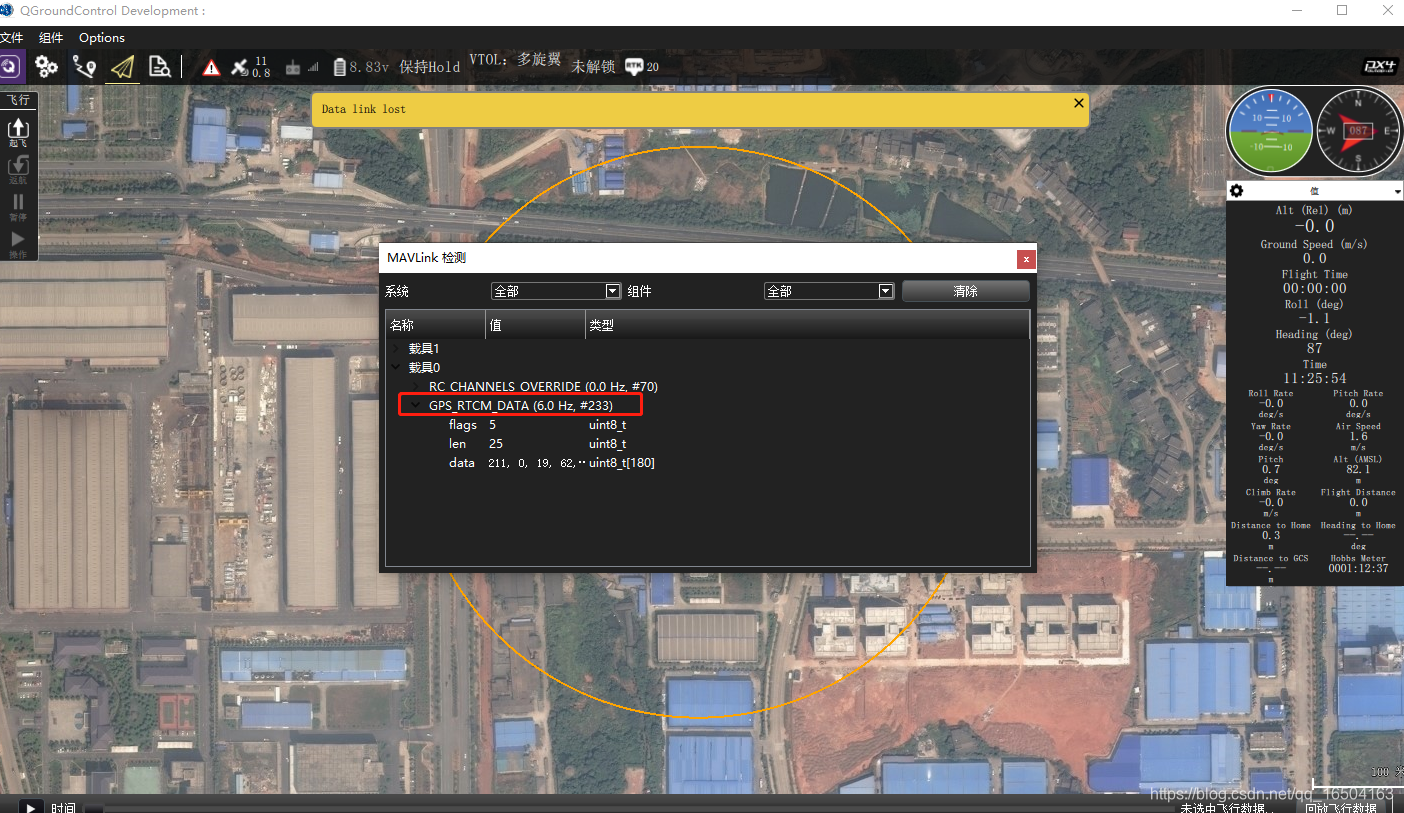
需要两个M8P GPS模块和数据链路才能使用PX4设置RTK。地面上的GPS称为基站(Base),空中的GPS单元称为移动站(Rover)。基站连接到QGroundControl(通过USB),并使用数据链路向飞行器传输RTCM校正数据(使用MAVLink传过来的 GPS_RTCM_DATA消息)。在自驾仪上,MAVLink数据包被解包并发送到机载GNSS单元,在那里进行处理以获得RTK解决方案。
2. RTK在QGC(GGroundControl)地面站中配置
本质上即插即用的,但是如果不行,请看以下配置:
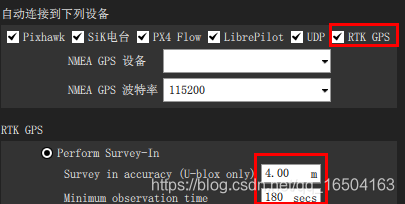
①. RTK GPS是否勾选
②. 搜索精度可以适当降低
③. 搜索时间可以适当延长
④ .在参数中看看是否为mavlink2,搜索MAV_PROTO_VER参数。
3. 还连接不上的问题
苦逼的我在网上搜索,官网、QQ群、论坛、室外测试,都不管用。在mission planner中能行,就已经证明硬件(ubx的m8p)没问题了,但是在QGC上死活不好使,于是乎搭建环境下载源码开始分析代码。关于RTKGPS在地面站中的配置和运行流程之后会贴上,反正结论就是在GQC源码中不支持串口的接入,只能用USB的方式接入。知道真相的我眼泪带下来…
4. 连接测试
把串口的连接换成USB后,所有硬件接好,结果如下
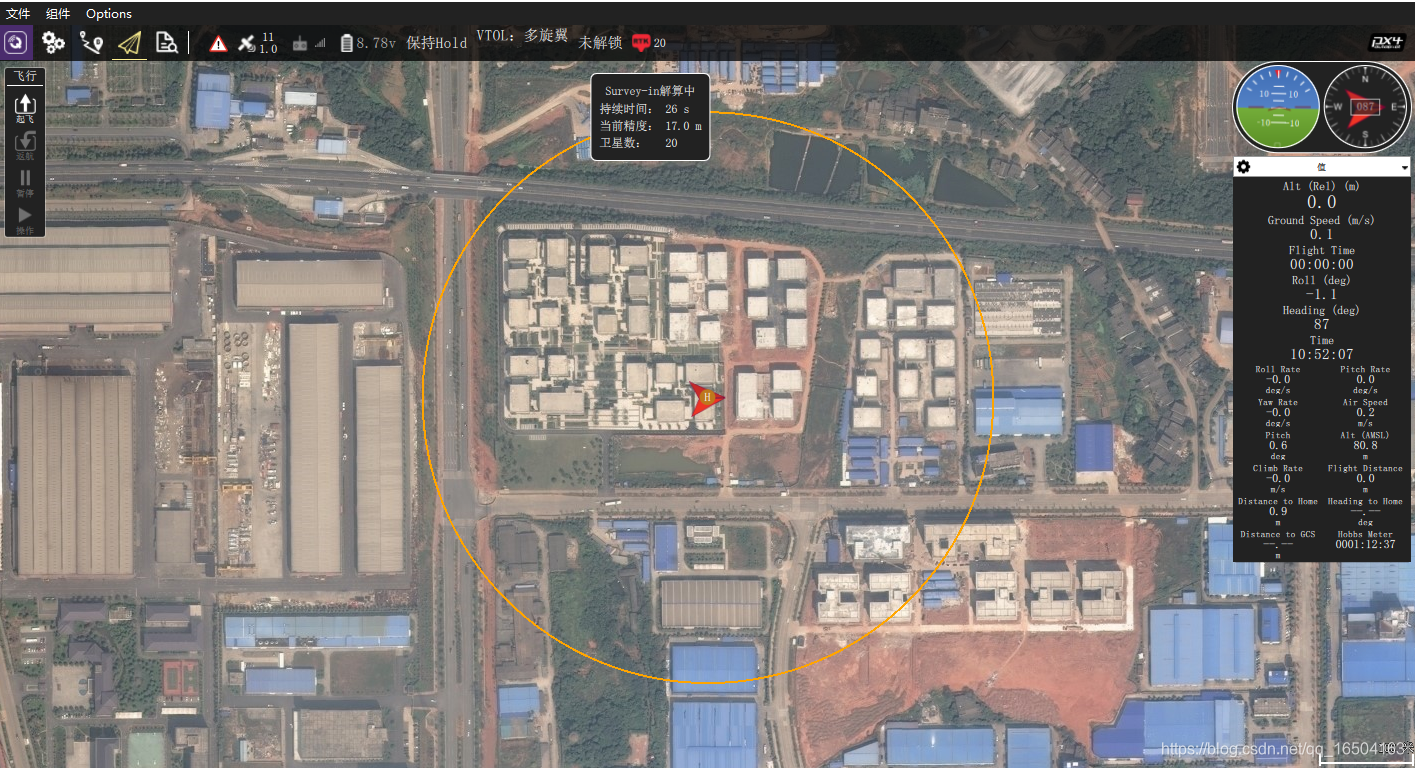
勘测模式下:
勘测后:
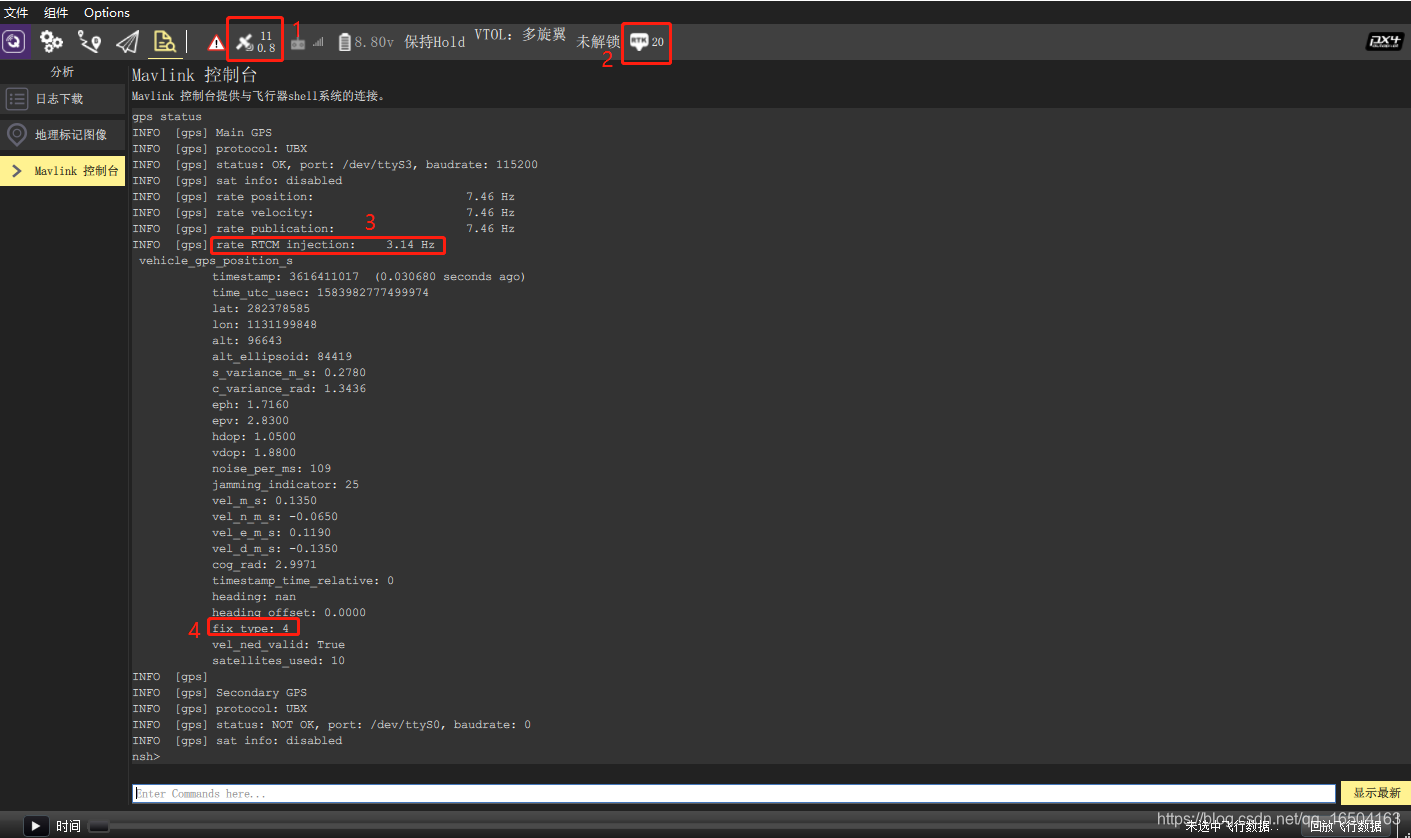 因为信号不太好,没有收到RTK,但是也通过地面站转发成功了。
因为信号不太好,没有收到RTK,但是也通过地面站转发成功了。
4中4代表 3D with DGPS.
0-1: no fix, 2: 2D fix, 3: 3D fix. 4: 3D with DGPS. 5: 3D with RTK</field>
当然不通过地面站转发也是可以的,这是我同事做的,通过硬件转发。这是截获的数据包:
参考:
链接1: 官网中RTK GPS配置.
链接2: 雷讯中RTK GPS配置
