目标检测算法–anchor
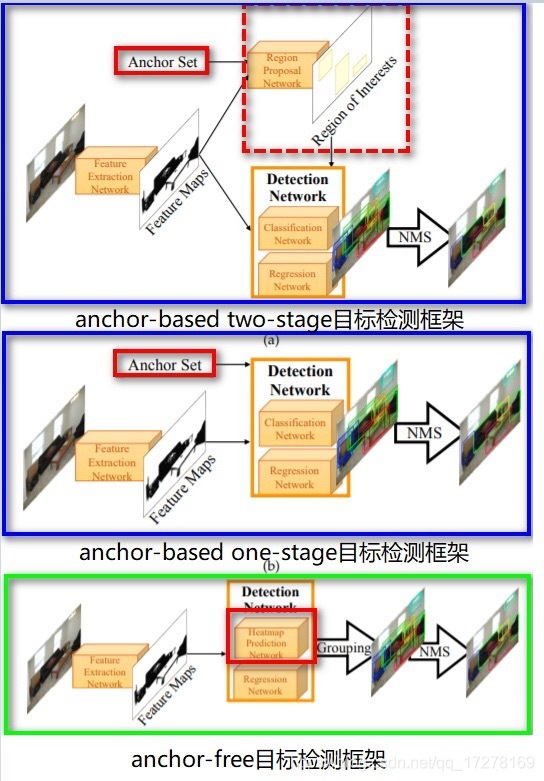
给目标检测算法分类,可以从好几个维度去看。例如我们常见的One-Stage和Two-Stage,这是从网络Stage数量上来分的。今天总结的方法,是根据是否有anchor来区分,所以在这个维度上,目标检测算法可以分为anchor based和anchor free,其实归根结底,都被称为Proposal Generation。其实anchor-free并不是一个新概念,大名鼎鼎的yolo应该是目标检测领域最早的anchor-free模型了。
Proposal Generation在目标检测中也是一个非常重要的角色,因为目标检测是需要定位的,定位准不准,全看proposal。一个Proposal生成器可以生成一系列的Bounding Box,这些BBox都是潜在的目标。我们将生成Proposal的方法分为四类:传统计算机视觉方法,anchor-based监督学习方法,anchor-free方法。不管是One-Stage还是Two-Stage算法都会生成Proposal,两者主要的区别是Two-Stage的算法生成的Proposal只有前景或者背景简单的二分类信息,具体类别和精细位置回归值由另一个stage的网络完成;然而One-Stage算法认为图像中每一个区域都是一个潜在的proposal,然后有根据地去预测出潜在目标的坐标和类别。
1、传统计算机视觉方法
这类的方法是使用传统计算机视觉的方法去生成Proposal,例如“边”,”角“,”颜色“,”连通域“之类的。从目标检测算法的发展路线中就可以看到,早期的目标检测算法就是通过一些传统视觉方法找到Proposal,例如大名鼎鼎的SS方法(Selective Search),在fast RCNN中被用来获取推选框的那个。这里涉及到一个概念叫做超像素(superpixels),超像素是一系列像素的集合,这些像素具有类似的颜色、纹理、、梯度等特征,并且距离相近,然后把这些像素归于一类。如下图所示

通过合并超级像素之后,可以很粗略地找到一些潜在的目标,然后再通过一系列分割的算法,最终生成一些Proposals。后来由于此种方法太耗时,逐渐被CNN取代,以至于现在基本上看不到传统算法做proposal了。
2、Anchor-based 方法
anchor-based方法在目标检测算法中占有半壁江山,这种说法绝不为过,此种方法是根据预先定义的anchor来生成Proposal。我是在Faster-RCNN中第一次接触到proposal,使用监督学习RPN网络去生成Proposal,这里引用下关于FasterRCNN的介绍
第一步是在一个滑动窗口上生成不同大小和长宽比例的anchor box,取定IoU的阈值来标定这些anchor box的正负。于是,传入RPN网络的样本数据被整理为anchor box(坐标)和每个anchor box是否有物体(二分类标签)。RPN网络将每个样本映射为一个概率值和四个坐标值,概率值反应这个anchor box有物体的概率,四个坐标值用于回归定义物体的位置。最后将二分类和坐标回归的损失统一起来,作为RPN网络的目标训练。由RPN得到Region Proposal在根据概率值筛选后经过类似的标记过程,被传入R-CNN子网络,进行多分类和坐标回归,同样用多任务损失将二者的损失联合。
后来SSD直接使用多尺度anchor去匹配目标,这一点跟RPN有一点类似,在预定义的acnhor上使用不同的aspect ratio,所以能够适应多尺度的目标检测。 SSD的思想和RPN不同之处在于,前者可以在每一个Anchor Proposal上输出具体的类别判断,后者只能输出是前景还是背景的概率值,具体的类别需要另一个stage的算法判断。
后面,不管是目标检测还是人脸检测,很多都是anchor-based的方法
3、anchor-free方法
anchor-free的方法提出的还挺早的,早在2015年DenseBox做人脸检测,yoloV1做目标检测,MTCNN做人脸检测,这些都是anchor-free的方法。这些可以被看成是anchor-free的早期探索吧,因为yolov2和yolov3后来都不使用anchor-free了。
-
基于关键点的方法
基于关键点的方法又可以被分为corner-based和center-based。最早的基于关键点的方法是CornerNet,是通过检测bbox的对角线来检测出目标,提出corner pooling,更好地定位bbox的角点。首先预测出两组heatmaps,一组为top-left角点,另一组为bottom-right角点,每一组heatmaps有C个通道,表示C个类别,尺寸为HxW。ExtremeNet通过预测上下左右四个极值点和一个中心点来检测目标,CenterNet是预测左上角点,右下角点和中心点三个值。从目前的目标检测效果来看CenterNet的性能还不错,正在持续跟进。
-
基于密集预测的方法
密集预测就是直接在特征图上回归出object的坐标,不同于角点检测。关于这一块的内容,我也实践的比较少,经常听说的几类方法有FCOS和FoveaBox,感兴趣的同学自己去看下原文吧。
从目前的检测算法文章来看,感觉anchor-free的方法更加的流行,新的文章层出不穷。应该去多花点时间学学新的东西了。
公众号:卡本特

