101 HOG特征描述子—多尺度检测
代码
import cv2 as cv
if __name__ == '__main__':
src = cv.imread("../images/pedestrian.png")
cv.imshow("input", src)
hog = cv.HOGDescriptor()
hog.setSVMDetector(cv.HOGDescriptor_getDefaultPeopleDetector())
# Detect people in the image
(rects, weights) = hog.detectMultiScale(src,
winStride=(4, 4),
padding=(8, 8),
scale=1.25,
useMeanshiftGrouping=False)
for (x, y, w, h) in rects:
cv.rectangle(src, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv.imshow("hog-detector", src)
cv.waitKey(0)
cv.destroyAllWindows()
实验结果
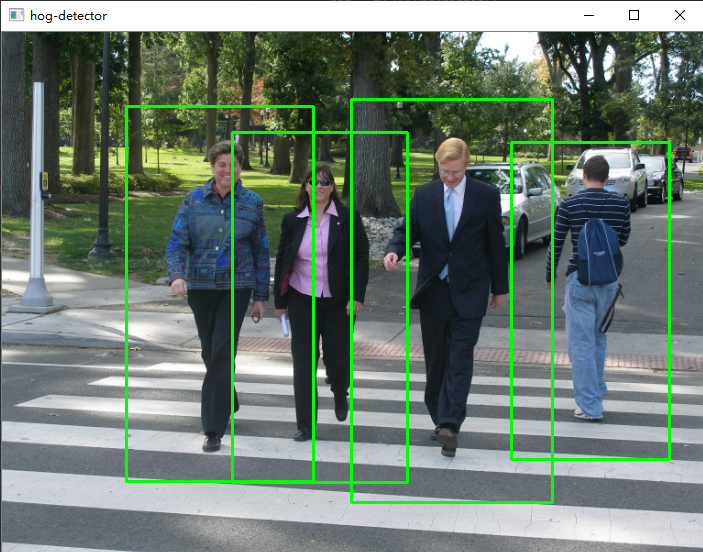
解释
HOG(Histogram of Oriented Gradient)特征本身不支持旋转不变性,通过金字塔可以支持多尺度检测实现尺度空间不变性,OpenCV中支持HOG描述子多尺度检测的相关API如下:
virtual void cv::HOGDescriptor::detectMultiScale(
InputArray img,
std::vector< Rect > & foundLocations,
double hitThreshold = 0,
Size winStride = Size(),
Size padding = Size(),
double scale = 1.05,
double finalThreshold = 2.0,
bool useMeanshiftGrouping = false
)
foundLocations = cv.HOGDescriptor.detectMultiScale(img, hitThreshold, winStride, padding, scale, finalThreshold, useMeanshiftGrouping)
foundLocations表示发现对象矩形框img表示输入图像hitThreshold表示SVM距离度量,默认0表示,表示特征与SVM分类超平面之间winStride表示窗口步长padding表示填充scale表示尺度空间finalThreshold最终阈值,默认为2.0useMeanshiftGrouping不建议使用,速度太慢拉
这个其中窗口步长与Scale对结果影响最大,特别是Scale,小的尺度变化有利于检出低分辨率对象,同事也会导致FP发生,高的可以避免FP但是会产生FN(有对象漏检)。窗口步长是一个或者多个block区域,关于Block区域可以看第一张图:

所有内容均来源于贾志刚老师的知识星球——OpenCV研习社,本文为个人整理学习,已获得贾老师授权,有兴趣、有能力的可以加入贾老师的知识星球进行深入学习。

