读书笔记:SLAM:现在与未来
终于到本书最后一章了。也到了此系列博客的最后一篇! 我们前面的内容介绍了一个SLAM 系统中的各个模块的工作原理,这是研究者们多年的工作的结晶。目前,除了这些理论框架之外,我们也积累了许多优秀的开源SLAM 方案。不过,由于它们大部分实现都比较复杂,不适合初学者做为上手的材料,所以我们放到了本书的最后加以介绍。相信读者通过阅读之前的章节,应该能明白它们的基本原理。
当前的开源方案
| 方案名称 | 传感器形式 | 地址 |
|---|---|---|
| MonoSLAM | 单目 | https://github.com/hanmekim/SceneLib2 |
| PTAM | 单目 | http://www.robots.ox.ac.uk/~gk/PTAM/ |
| ORB-SLAM | 单目为主 | http://webdiis.unizar.es/~raulmur/orbslam/ |
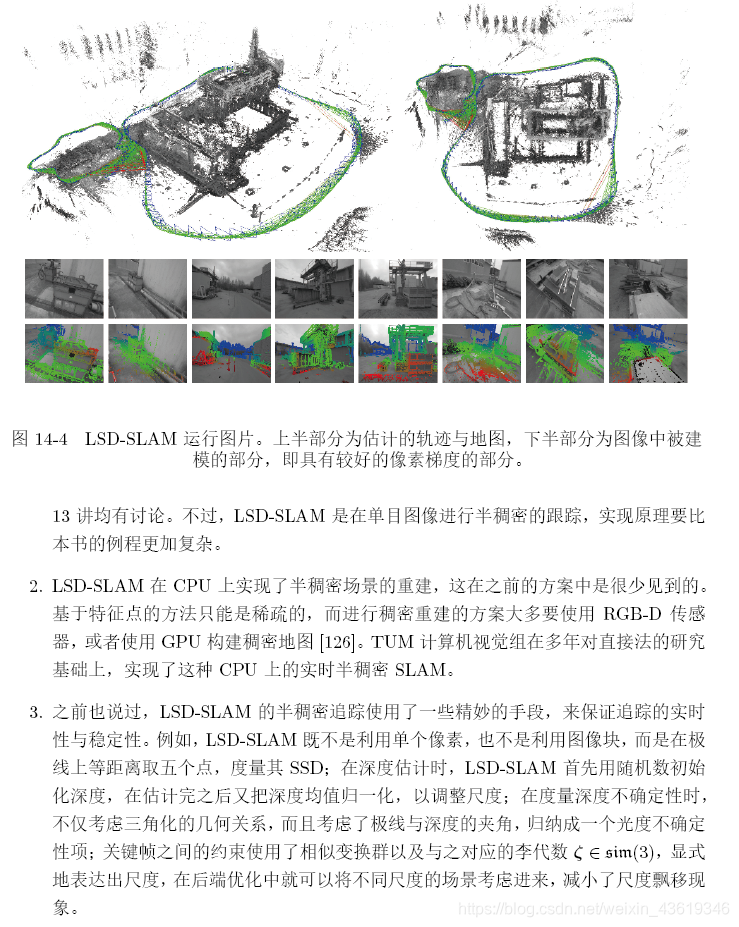
| LSD-SLAM | 单目为主 | http://vision.in.tum.de/research/vslam/lsdslam |
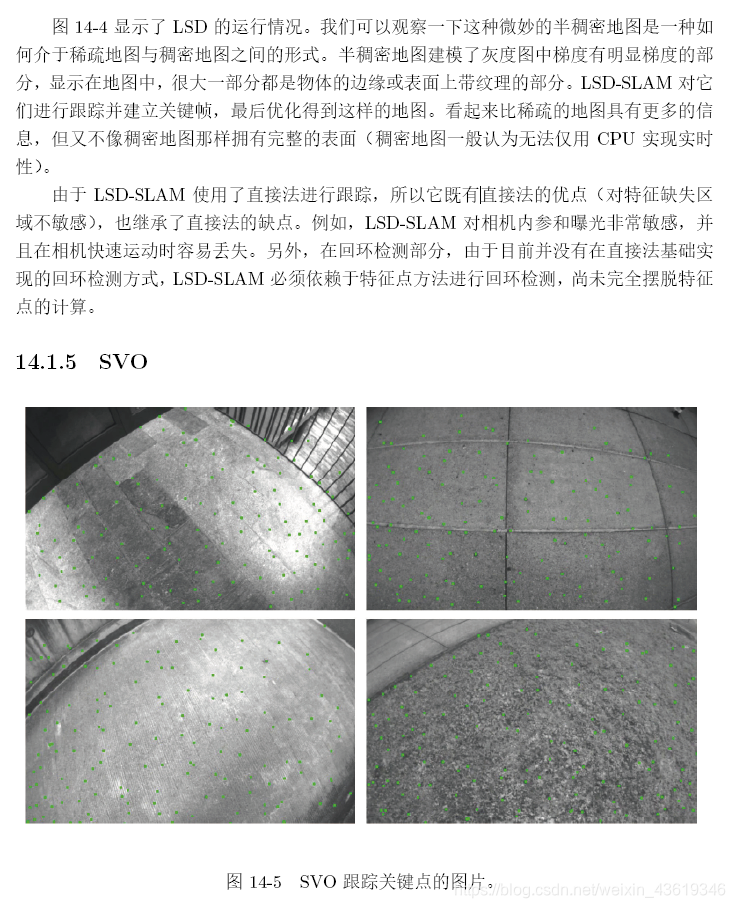
| SVO | 单目 | https://github.com/uzh-rpg/rpg_svo |
| DTAM | RGB-D | https://github.com/anuranbaka/OpenDTAM |
| DVO | RGB-D | https://github.com/tum-vision/dvo_slam |
| DSO | 单目 | https://github.com/JakobEngel/dso |
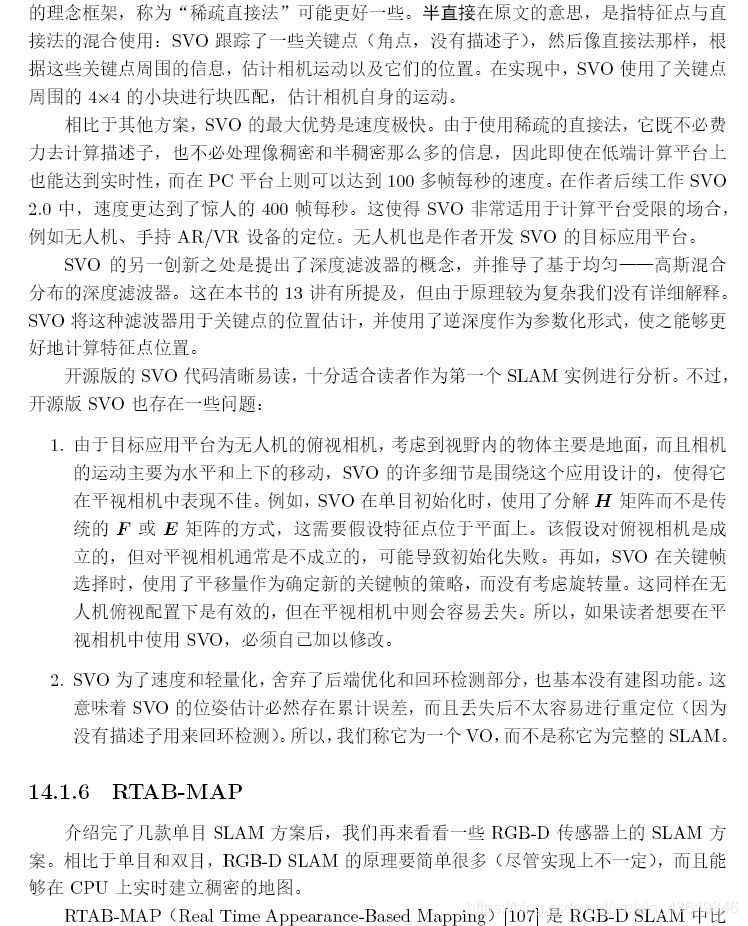
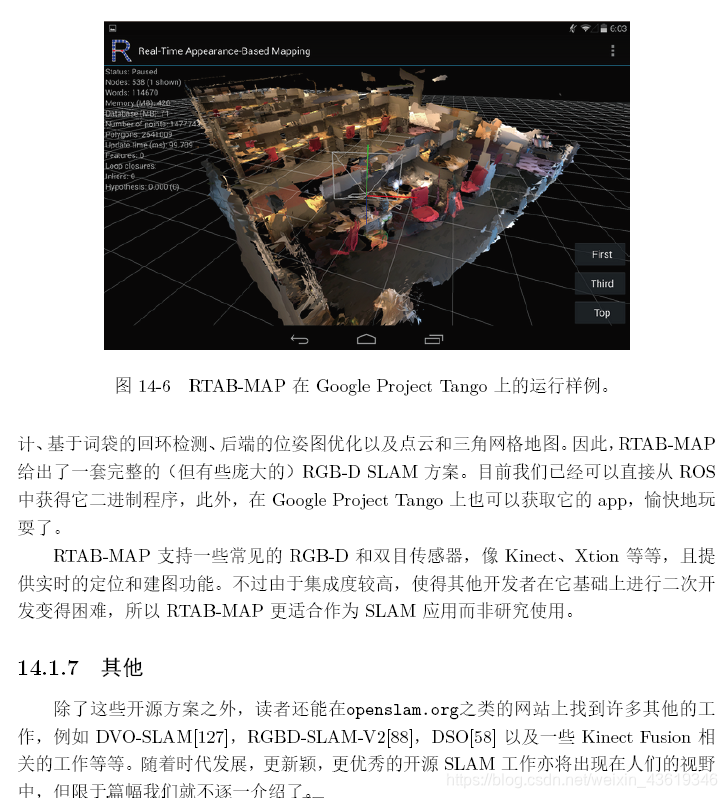
| RTAB-MAP | 双目/RGB-D | https://github.com/introlab/rtabmap |
| RGBD-SLAM-V2 | RGB-D | https://github.com/felixendres/rgbdslam_v2 |
| Elastic Fusion | RGB-D | https://github.com/mp3guy/ElasticFusion |
| Hector SLAM | 激光 | http://wiki.ros.org/hector_slam |
| GMapping | 激光 | http://wiki.ros.org/gmapping |
| OKVIS | 多目+IMU | https://github.com/ethz-asl/okvis |
| ROVIO | 单目+IMU | https://github.com/ethz-asl/rovio |



未来的SLAM 话题
大体来说,SLAM 将来的发展趋势一共有两个大类:一是往轻量级、小型化方向发展,让SLAM 能够在嵌入
式或手机等小型设备上良好的运行,然后考虑以它为底层功能的应用。毕竟大部分场合中,我们的真正目的都是实现机器人、AR/VR 设备的功能,比如说运动、导航、教学、娱乐,而SLAM 是为上层应用提供自身的一个位姿估计。在这些应用中,我们不希望SLAM 占据所有计算资源,所以对SLAM 的小型化和轻量化有非常强烈的要求。另一个方面,则是利用高性能计算设备,实现精密的三维重建、场景理解等功能。在这些应用中,我们的目的是完美地重建场景,而对于计算资源和设备的便携性则没有多大限制。由于可以利用GPU,这个方向和深度学习亦有结合点。
视觉+ 惯导SLAM
语义SLAM

课后习题
1. 选择本讲提到的任意一个开源SLAM 系统,在你的机器上编译运行它,直观体验一 下它的过程。
已运行过ORB-SLAM2以及cartographer。
2. 你应该已经能够看懂绝大多数SLAM 相关论文了。拿起纸和笔,开始你的研究吧!
确实,开始吧!
