83 角点检测—亚像素级别角点检测
代码
import numpy as np
import cv2 as cv
def process(image, opt=1):
# Detecting corners
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
corners = cv.goodFeaturesToTrack(gray, 100, 0.05, 10)
print(len(corners))
for pt in corners:
print(pt)
b = np.random.random_integers(0, 256)
g = np.random.random_integers(0, 256)
r = np.random.random_integers(0, 256)
x = np.int32(pt[0][0])
y = np.int32(pt[0][1])
cv.circle(image, (x, y), 5, (int(b), int(g), int(r)), 2)
# detect sub-pixel
winSize = (5, 5)
zeroZone = (-1, -1)
criteria = (cv.TERM_CRITERIA_EPS + cv.TermCriteria_COUNT, 40, 0.001)
# Calculate the refined corner locations
corners = cv.cornerSubPix(gray, corners, winSize, zeroZone, criteria)
# display
for i in range(corners.shape[0]):
print(" -- Refined Corner [", i, "] (", corners[i, 0, 0], ",", corners[i, 0, 1], ")")
return image
src = cv.imread("../images/box.bmp")
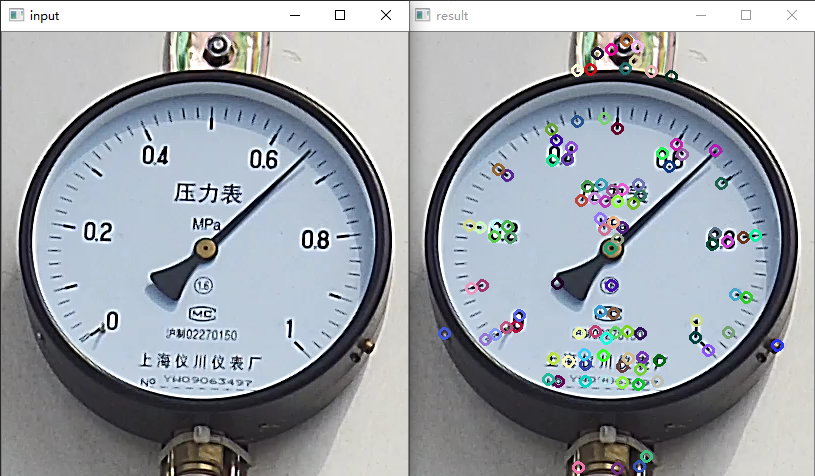
cv.imshow("input", src)
result = process(src)
cv.imshow('result', result)
cv.waitKey(0)
cv.destroyAllWindows()
实验结果
解释
OpenCV中角点检测的结果实际不够精准,因为真实的计算中有些位置可能是在浮点数的空间内才最大值,这样就需要我们通过给定的响应值,在像素邻域空间进行拟合,实现亚像素级别的角点检测。OpenCV中相关API与解释如下:
corners = cv.cornerSubPix(image, corners, winSize, zeroZone, criteria)
image单通道输入图像,八位或者浮点数corners是输入输出的关键点坐标集合winSize表示插值计算时候窗口大小zeroZone表示搜索区域中间的dead region边长的一半,有时用于避免自相关矩阵的奇异性。如果值设为(-1,-1)则表示没有这个区域。criteria角点精准化迭代过程的终止条件
所有内容均来源于贾志刚老师的知识星球——OpenCV研习社,本文为个人整理学习,已获得贾老师授权,有兴趣、有能力的可以加入贾老师的知识星球进行深入学习。

