前言
MPC5748G开发环境搭建
MPC5748G S32_SDK_PA_RTM_3.0.0 GPIO 调试仿真设置
前两篇讲了开发环境的搭建, GPIO的读写操作, 调试仿真的设置等, 本篇介绍下定时器的使用.
定时器简介
MPC5748G的定时器种类有点多:
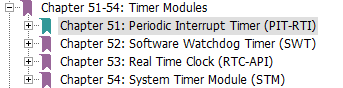
其中, 一个PIT和3个STM类似于我们传统意义上的定时器.
PIT有16通道, 每通道有32位长, 连续通道可以软件链成64位定时器:


3个STM的介绍:

PIT和STM都可以用SDK中的timing_pal来操作. 这里以PIT为例.
新建工程
仍以DEVKIT-MPC5748G为例, 使用定时器翻转LED(PTJ4). 新建工程步骤如下:
- 打开S32, File -> New -> S32DS Application Project
- 选择MCU: MPC5748G, 填入工程名
- 默认3个核都勾上了, 这里去掉Z4_1和Z2_2的勾选, 只保留Z4_0, 选择SDK: MPC5748G_SDK_Z4_0 3.0.0, 点击Finish结束:

PE配置
先把PJ4的LED搞上去:

Components Library中双击添加timing_pal:

点击左侧timing_pal1:timing_pal进行配置:

Channel可选0~15通道, 类型可选连续(Continuous)或者单次(One-shot), 通道的回调函数名字自己写.
点击生成代码:

补全代码
/* User includes (#include below this line is not maintained by Processor Expert) */
#define LED_PORT PTJ
#define LED_PIN 4U
#define PIT_CHANNEL 0UL
#define PERIOD_BY_NS 1000000000UL /* nanosecond unit, The period is 1 second */
void pit_0_callback(void * userData) {
(void)userData;
PINS_DRV_TogglePins(LED_PORT, (1 << LED_PIN));
}
/*!
\brief The main function for the project.
\details The startup initialization sequence is the following:
* - startup asm routine
* - main()
*/
int main(void)
{
/* Write your local variable definition here */
uint64_t pitResolution;
/*** Processor Expert internal initialization. DON'T REMOVE THIS CODE!!! ***/
#ifdef PEX_RTOS_INIT
PEX_RTOS_INIT(); /* Initialization of the selected RTOS. Macro is defined by the RTOS component. */
#endif
/*** End of Processor Expert internal initialization. ***/
/* Write your code here */
/* For example: for(;;) { } */
/* Initialize clock gate*/
CLOCK_SYS_Init(g_clockManConfigsArr, CLOCK_MANAGER_CONFIG_CNT,
g_clockManCallbacksArr, CLOCK_MANAGER_CALLBACK_CNT);
CLOCK_SYS_UpdateConfiguration(0U, CLOCK_MANAGER_POLICY_AGREEMENT);
/* Initialize and configure pins */
PINS_DRV_Init(NUM_OF_CONFIGURED_PINS, g_pin_mux_InitConfigArr);
PINS_DRV_SetPins(LED_PORT, (1 << LED_PIN));
/* Initialize TIMING over PIT */
TIMING_Init(&timing_pal1_instance, &timing_pal1_InitConfig);
/* Get tick resolution in nanosecond unit for TIMING over PIT */
TIMING_GetResolution(&timing_pal1_instance, TIMER_RESOLUTION_TYPE_NANOSECOND, &pitResolution);
/* Start PIT channel 0 counting with the period is 1 second,
the period in tick = the period in nanosecond / PIT tick resolution in nanosecond */
TIMING_StartChannel(&timing_pal1_instance, PIT_CHANNEL, PERIOD_BY_NS/pitResolution);
while(1);
/*** Don't write any code pass this line, or it will be deleted during code generation. ***/
/*** RTOS startup code. Macro PEX_RTOS_START is defined by the RTOS component. DON'T MODIFY THIS CODE!!! ***/
#ifdef PEX_RTOS_START
PEX_RTOS_START(); /* Startup of the selected RTOS. Macro is defined by the RTOS component. */
#endif
/*** End of RTOS startup code. ***/
/*** Processor Expert end of main routine. DON'T MODIFY THIS CODE!!! ***/
for(;;) {
if(exit_code != 0) {
break;
}
}
return exit_code;
/*** Processor Expert end of main routine. DON'T WRITE CODE BELOW!!! ***/
} /*** End of main routine. DO NOT MODIFY THIS TEXT!!! ***/
/* END main */
这里调试没有运行起来, 下载进去拔掉OpenSDA的USB可以运行, 还不晓得哪里出了什么差错.
微信公众号
欢迎扫描关注我的微信公众号, 及时获取最新文章:

