文章目录
Introduction:
- UAV的部分就不说了,还是千篇一律的内容。
- NOMA: NOMA is known to simultaneously serve multiple users by separating users in the power domain and the code domain. NOMA has a better outage performance than OMA techniques as well as superior ergodic sum rate performance.
文章贡献
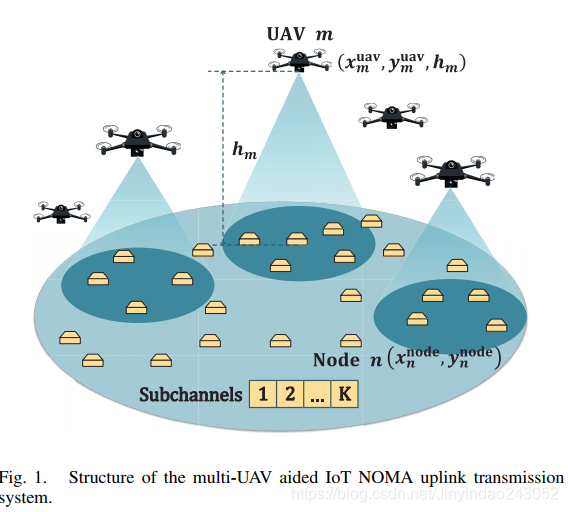
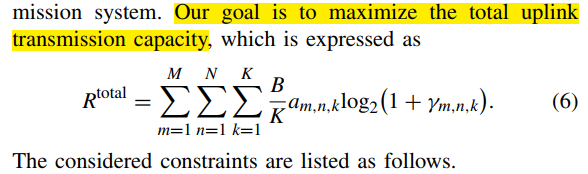
- We focus on a practical multi-UAV aided IoT NOMA uplink transmission system, where we aim to maximize the total uplink capacity.
- The classic K-means clustering method is invoked for grouping IoT nodes into subsystems corresponding to the number of UAVs. A low-complexity many-many matching algorithm is designed for realizing efficient subchannel assignment in each subsystem
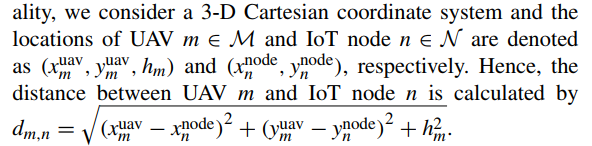
物理建模
系统构建
Let K = [1, 2, . . . , K] denote the set of the subchannels
信道模型
干扰模型
定义了decoding的顺序
定义channel分配矩阵P和power分配矩阵A

(2)是对于无人机m的用户n在波段k上受到的来自Sm的总干扰
(3)是对于无人机m的用户n在波段k上受到的来自其他无人机的干扰
注意这里是uplink干扰

老规矩,根据香农公式求信噪比和data rate
B/K是子信道(subchannel)的带宽
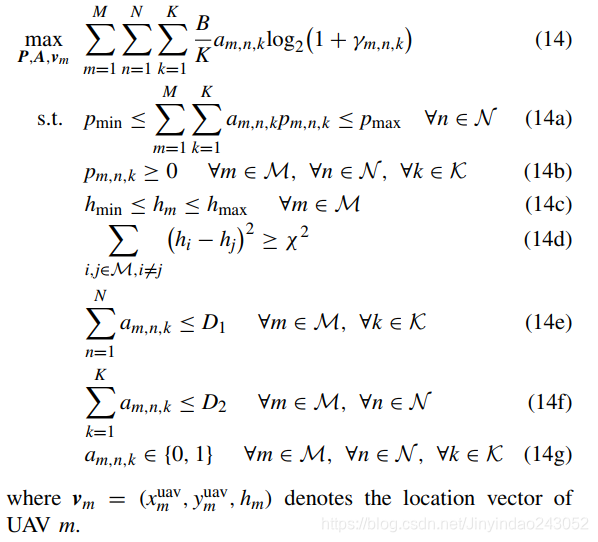
问题建模
限定
 (9)对无人机飞行高度的限制
(9)对无人机飞行高度的限制
(10)对无人机间距的限制,必须满足一定的高度差以免撞机
Channel Allocation Constraint


规定一个subband最多分给D1个用户,一个用户最多占用D2个subband
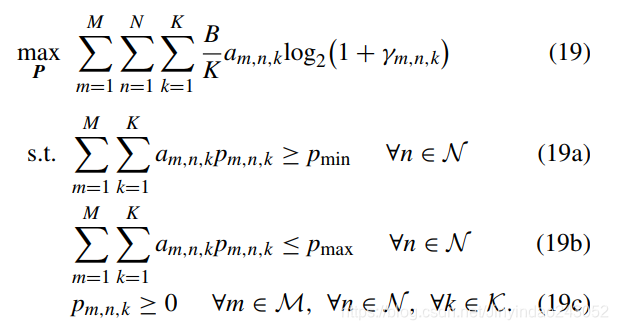
问题的数学化表达
channel allocation——分配子信道
K均值先对用户进行cluster,然后把UAV放置到每个cluster的中心位置
分配K个子信道给每个UAV uplink subsystem,先对A矩阵进行初始化
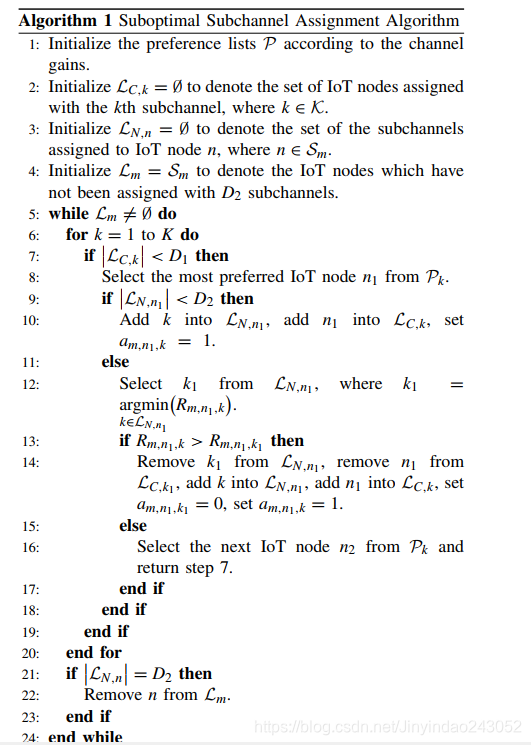
这个是channel assignment算法
三个重要假设
1)we assume that the flight height of UAV m is fixed at h0(等高度)
2)each IoT node is assumed to adopt the equal power(等能量)
3)Since the horizontal location of UAV m is fixed(无人机平面位置由K均值确定)
循环保证每个IoT node 都被分配够D2个subchannel
对于每一个用户,先遍历看是否有subchannel没有被占满,如果它没有被占满,看看该用户占用的subchannel数量有没有达到D2上限,如果没有,那么占用该信道。如果已经占用了D2个用户,剔除R(data rate)不如现在信道的信道,并且和现在遍历的这个信道连接。
直到所有的用户都占了D2个信道,退出循环
power allocation——分配传输能量
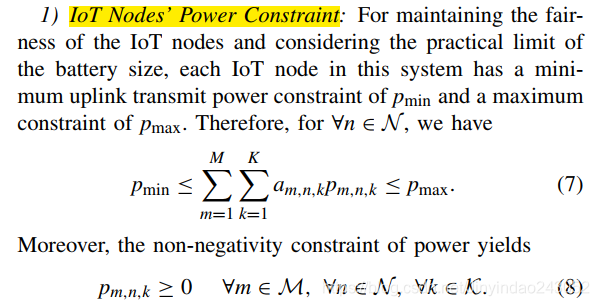
问题建模,每个节点(node)的传输能量要满足要求
假设等高度Given the fixed UAVs’ flight heights of h0
现在优化的是P矩阵,A矩阵已经求出来了
因为目标函数非凸,做近似

一个重要的不等式(来自参考文献)
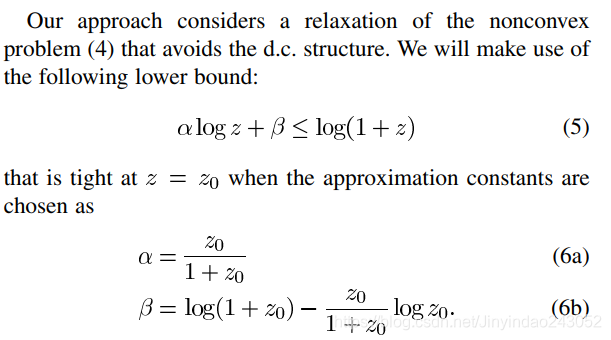


对于用户n来说,m号无人机相连接的node(即与n同处在一个cell中的其他无人机)在k子波段产生的干扰总和
其他无人机的用户在k波段产生的干扰
近似完后的问题
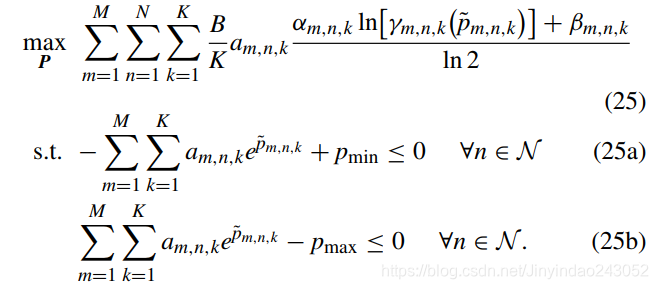
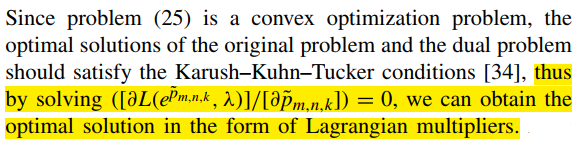
作者用拉格朗日乘子法求解,说来话长,我们来看下结果

这就是
的最优值

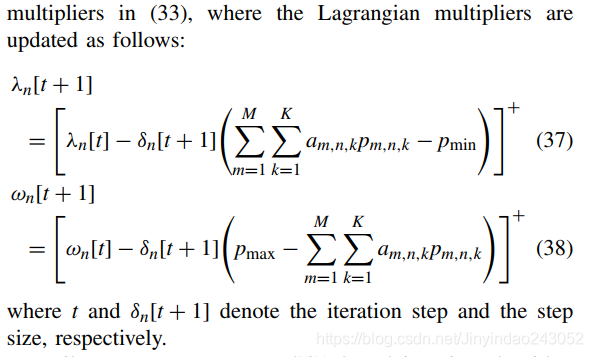
拉格朗日乘子的迭代策略
更新拉格朗日乘子
和
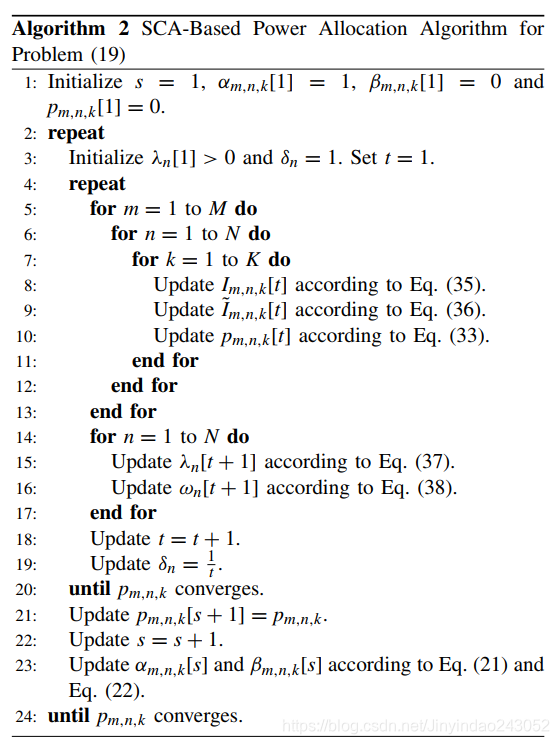
successive convex approximation(SCA)
、
和
都是先初始化再通过迭代得到
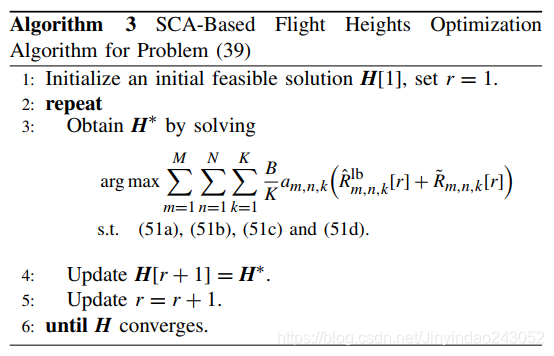
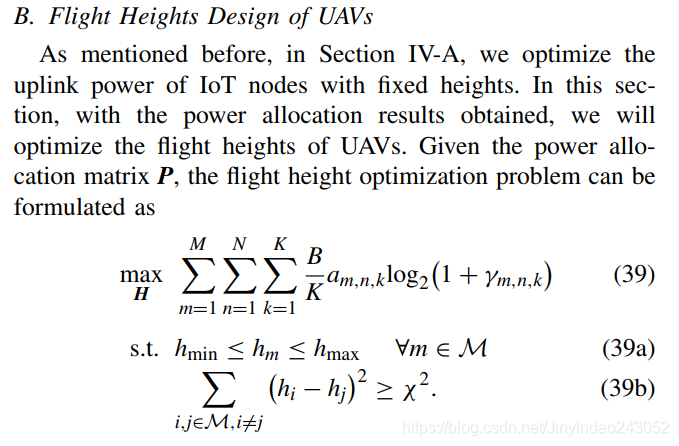
height allocation——对高度优化
先列出目标函数和限制条件
看来作者真是用SCA屡试不爽啊

我们首先来看看式子里的
是怎么得到的

说白了,就是把
用上面那个式子替换掉,括号里面再通分
其中

其实就标黄的这一块不一样
(log里面相除能展开成相减)
我们要优化的是m个UAV的高度
下面是近似化处理

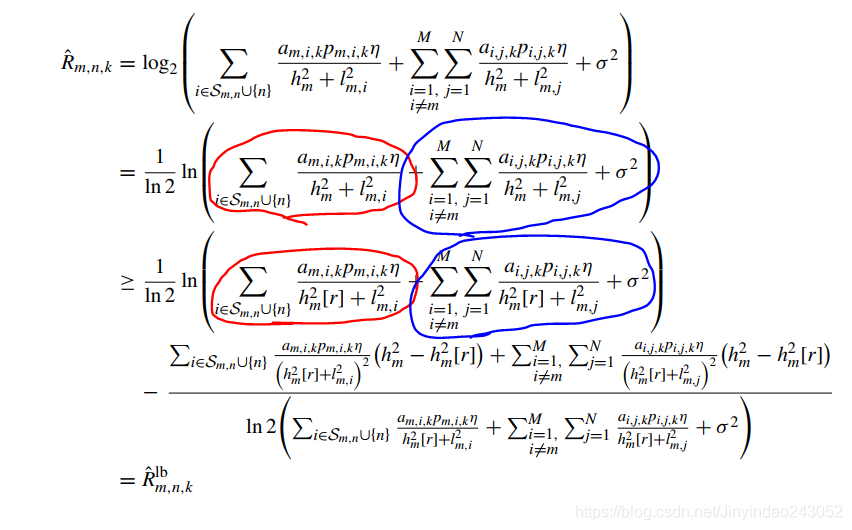
实际上是在h[r]处做泰勒展开
好吧,用
来替代


注意增加了

补充一点


下面是一些变形

这里对
和
都采用向量的
展开

作者使用了MATLAB进行优化
problem (51) can be efficiently solved by standard convex optimization solvers such as CVX