Directorio de artículos
25.1.3 Inspección del sensor de rango
25.1.4 Comprobación previa al desbloqueo
25.1.7 Configuraciones de funcionamiento normales
25.1.8 Ejemplo de vídeo (Copter-3.4)
25.1.9 Calibración inalámbrica
25.1.1 Prueba del sensor
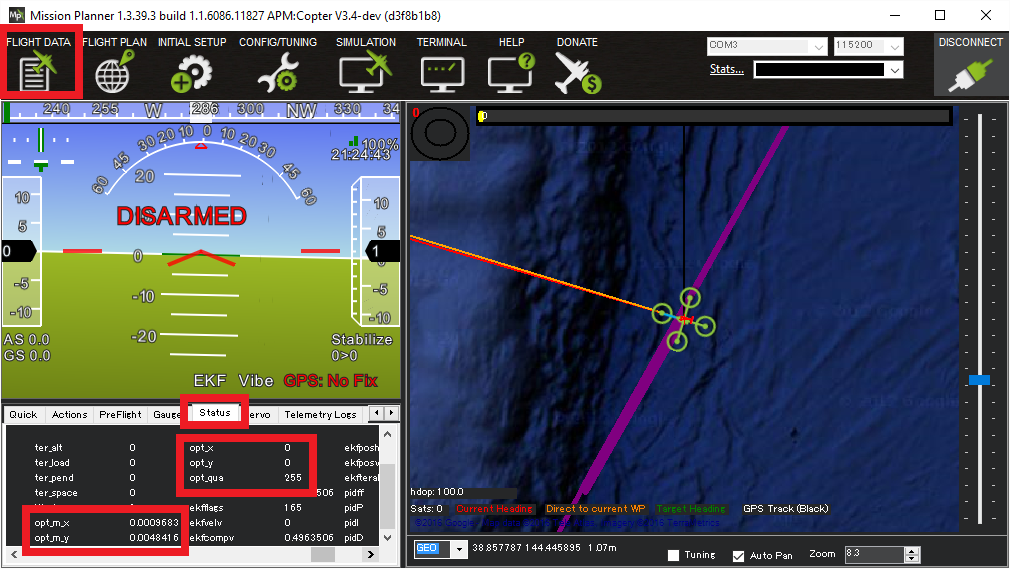
Después de conectar los sensores al piloto automático , use Mission Planner para conectarse al piloto automático y abra la pestaña Estado de la pantalla Datos de vuelo . Si el sensor está funcionando, verá que los valores opt_m_x , opt_m_y y opt_qua son distintos de cero.
25.1.2 Calibración del sensor
1. Conecte el piloto automático yconfigure LOG_DISARMED en 1 para garantizar que la función de registro cuando esté bloqueada esté habilitada.
2. Busque un lugar con una superficie texturizada y mucha luz (luz natural o iluminación incandescente potente).
3. Retire la hélice (la seguridad es lo primero).
4. Encienda el avión y coloque el nivel lejos de su cuerpo y ojos.
5. En aproximadamente un segundo, el avión gira de -15 a +15 grados alrededor del eje de balanceo y viceversa. Repita de 5 a 10 veces. Durante la rotación, el centro del sensor y el fondo permanecen estacionarios cerrando un ojo.
6. Repita alrededor del eje de cabeceo del avión.
7. Descargue el registro flash de datos y trace los datos OF.flowX , OF.bodyX e IMU.GyrX . Debería ser así.
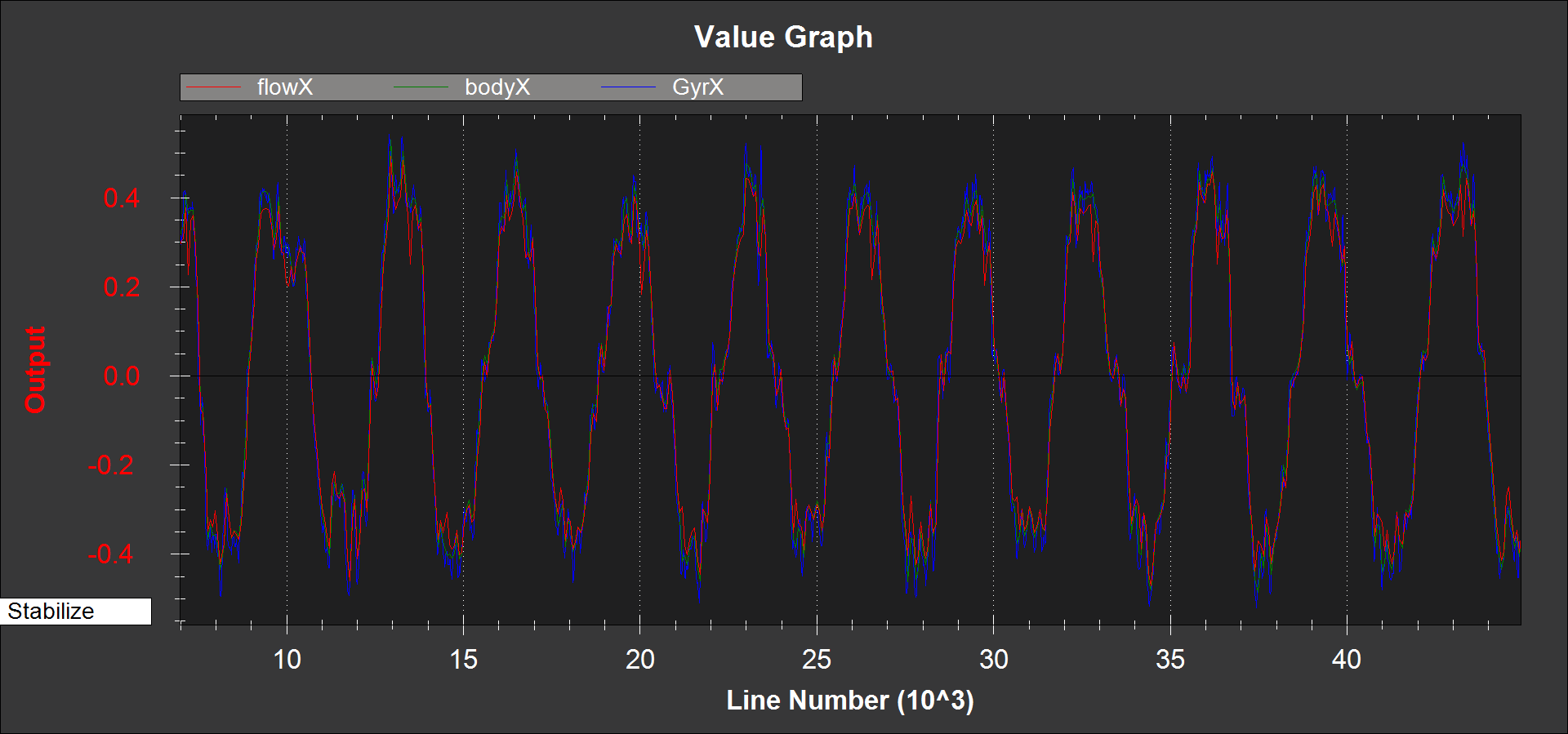
8. Si OF.flowX es mayor o menor que OF.bodyX , puedeajustarlo cambiando el parámetro FLOW_FXSCALER .
9. Si OF.bodyX no está relacionado con IMU.GyrX o tiene signos opuestos, puede ser queparámetro FLOW_ORIENT_YAW esté configurado incorrectamente o que el sensor de flujo no esté orientado hacia abajo.
10. Trazar datos de OF.flowY , OF.bodyYband e IMU.GyrY . Debería ser así.
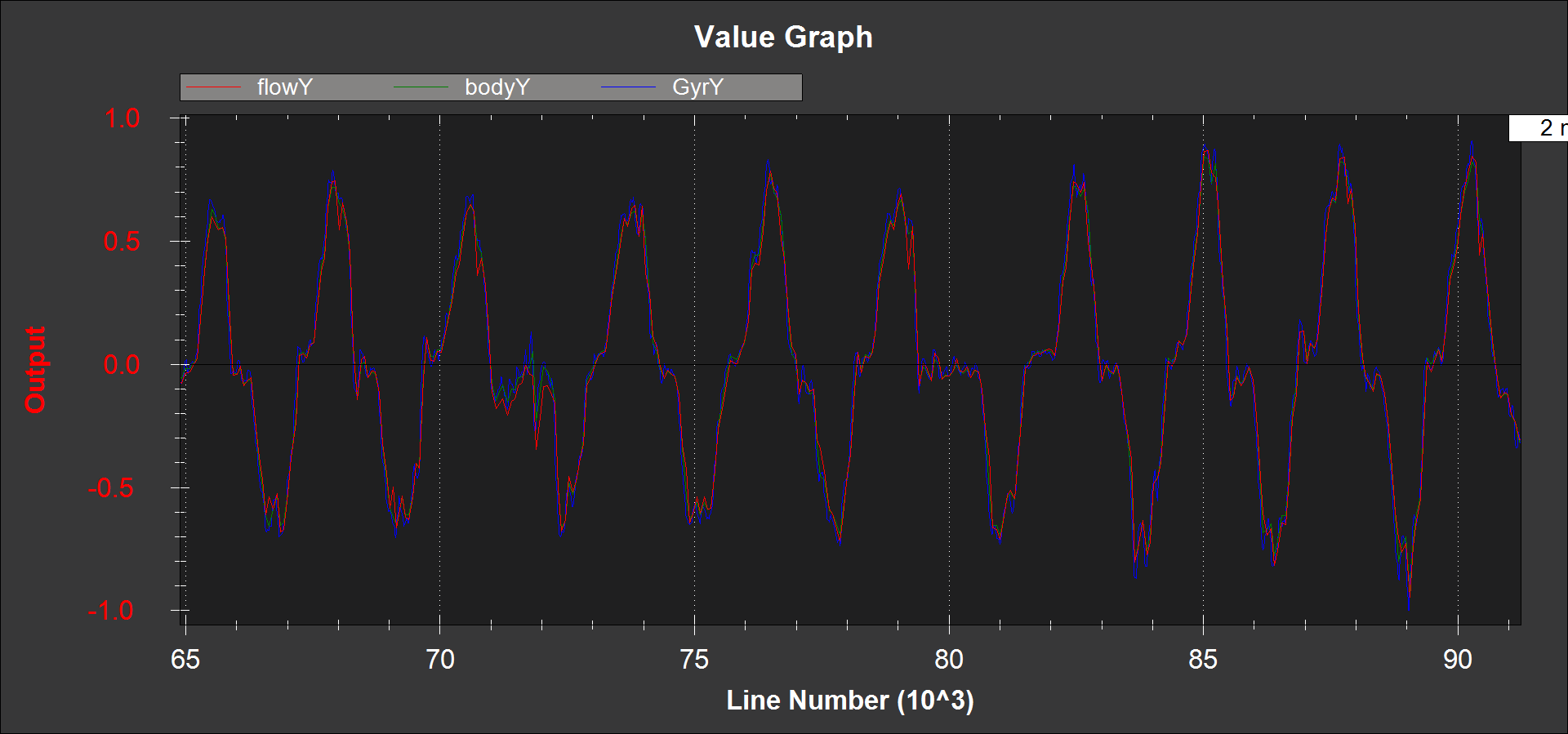
11. Si OF.flowY es mayor o menor que OF.bodyY , se puedeajustar cambiando el parámetro FLOW_FYSCALER .
12. Si OF.bodyY no está relacionado con IMU.GyrY o tiene signos opuestos, es posible que el parámetro FLOW_ORIENT_YAW esté configurado incorrectamente o que el sensor de flujo no esté orientado hacia abajo.
25.1.3 Inspección del sensor de rango
Consulte el registro de flash de la prueba de calibración del sensor de flujo para obtener información sobre la medición de EKF5 . Verifique lo siguiente:
1. Puede realizar mediciones de rango continuo.
2. La distancia que emite en el suelo es 10cm del valor esperado (recuerde que cuando el vehículo rueda o cabecea, la distancia medida aumentará porque el láser se mide en una pendiente).
25.1.4 Comprobación previa al desbloqueo
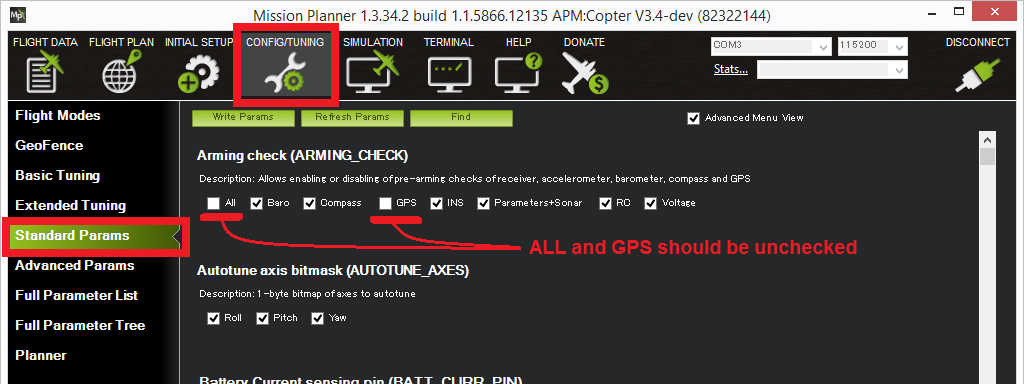
Para permitir el desbloqueo y el despegue en Loiter sin GPS , la verificación de desbloqueo del GPS debe desactivarse como se muestra en la imagen a continuación. Desmarque " Todos " y " GPS " y marque todas las demás opciones.
Dado que se requiere que los datos de la sonda/telémetro sean buenos para habilitar el flujo óptico, se deben realizar comprobaciones adicionales previas al desbloqueo.
Cuando la aeronave está bloqueada, debe elevarse directamente a una altura de al menos 50 cm pero no más de 2 m (si el telémetro muestra una distancia de más de 2 m , es necesario reiniciar el piloto automático ).
Cuando la comprobación de desbloqueo falla, el mensaje de error es " PreArm: comprobar el telémetro ".
Esta verificación se puede desactivar desmarcando la verificación de desbloqueo " Parámetros/Sonda ".
25.1.5 Primer vuelo
1. Para EKF2 , configure EK2_GPS_TYPE = 0 ; para EKF3 , configure EK3_SRC1_VELXY = 0 (no queremos que EKF use flujo óptico en esta etapa).
2. Vuele en modo estacionario en condiciones ESTABILIZE o AltHold (rotor) con un pequeño ángulo de inclinación dentro del rango de altura de50 cm a 3 m , ocondiciones QSTABILIZE o QHOVER (ala fija cuadrotor).
3. Descargue el registro flash ydibuje lo siguiente en Mission Planner .
4. EKF5.meaRng debe estar asociado con los cambios de altitud de la aeronave.
5. OF.flowX y OF.flowY deberían cambiar.
6. OF.bodyX y OF.bodyY deben ser coherentes con IMU.GyrX e IMU.GyrY .
25.1.6 Segundo vuelo
!Advertencia
Para completar este vuelo de forma segura, se requiere al menos 15 m de espacio libre alrededor de la aeronave. Si la estimación de la velocidad del flujo óptico es inexacta, tendrá pocas advertencias y la aeronave puede inclinarse hasta alcanzar el ángulo máximo de inclinación muy rápidamente.
1. Para EKF2 , configure EK2_GPS_TYPE = 3 ; para EKF3 , configure EK3_SRC1_VELXY = 5 y EK3_SRC1_POSXY = 0 para que EKF ignore el GPS y use el sensor de flujo.
2. Asegúrese de que los modos Loiter y hover estén disponibles en el transmisor.
3. Establezca el " origen EKF " en el mapa de la estación de control terrestre. Haga clic derecho en el Planificador de misiones , seleccione " Establecer punto de inicio aquí " y seleccione la configuración " Establecer origen EKF aquí ".
4. Despegue en estado Loiter y eleve el helicóptero/cuadriplano a una altura de aproximadamente 1 m .
5. Si la aeronave comienza a acelerar o muestra un movimiento errático de cabeceo o balanceo, cambie a modo estacionario y aterrice. Deberá descargar el archivo de registro y compartirlo en los foros para descubrir el motivo.
6. Si se mantiene en posición, felicidades, lo lograste y ahora puedes comenzar a intentar cambiar la altura ymoverlo en modo Loiter .
25.1.7 Configuraciones de funcionamiento normales
Para EKF2 :
1. Verifique EK2_ENABLE = 1 , habilite EKF2 .
2. Configure EK2_FLOW_DELAY según el sensor de flujo óptico .
3. Para usar solo el sensor de flujo óptico sin GPS , configure EK2_GPS_TYPE en 3 ; para usar GPS con el sensor de flujo óptico, configúrelo en 0 .
Para EKF3 :
!Nota
El firmware ArduPilot 4.1 y posteriores habilita y utiliza EKF3 de forma predeterminada .
1. Verifique EK3_ENABLE = 1 , habilite EKF3 .
2. Establezca AHRS_EKF_TYPE = 3 para usar EKF3 .
3. Establezca EK3_SRC_OPTIONS = 0 para deshabilitar FuseAllVelocities .
4. Configure EK3_FLOW_DELAY según el sensor de flujo óptico .
5. Configure EK3_SRC1_POSXY = 3 (posición horizontal principal desde GPS ,use solo el sensor de flujo óptico cuando esté configurado en 0 ).
6. Establezca EK3_SRC1_VELXY = 5 (velocidad horizontal principal de OpticalFlow).
7. Establezca EK3_SRC1_POSZ = 1 (posición vertical primaria desde el barómetro).
8. Establezca EK3_SRC1_VELZ = 0 (sin sensor de velocidad vertical maestro).
9. Establezca EK3_SRC1_YAW = 1 (guiñada principal/rumbo desde la brújula).
- Además, el GPS puede funcionar con OpticalFlow utilizando la función de cambio de fuente de luz EKF .
- Para obtener información sobre el cambio de fuente EKF , consulte Transiciones GPS/No GPS .
!Nota
Cuando el helicóptero tiene un sensor de flujo óptico (así como un telémetro) habilitado y especificado como la única fuente de posición horizontal (por ejemplo, `EK3_SRCx_VELXY`=OpticalFlow y `EK3_SRCx_POSXY`=None ), y el piloto orienta la aeronave requiriendo un estimación de posición Al volar en modo de control (es decir, Loiter o PosHold ), la aeronave no ascenderá por encima de la altitud máxima del telémetro especificada en `RNGFNDx_MAX_CM . Se trata de un mecanismo de seguridad; de lo contrario, el dispositivo de seguridad EKF se activaría cuando el avión volara fuera del alcance del telémetro .
25.1.8 Ejemplo de vídeo (Copter-3.4)
25.1.9 Calibración inalámbrica
Copter-4.2.0 contiene procedimientos de calibración de vuelo:
1. Configure RCx_OPTION = 158 (calibración de flujo óptico) para permitir que la calibración se inicie desde el interruptor auxiliar .
2. Configure el EKF3 para usar GPS (predeterminado).
- EK3_SRC1_POSXY = 3 (GPS)
- EK3_SRC1_POSZ = 1 (Baró)
- EK3_SRC1_VELXY = 3 (GPS)
- EK3_SRC1_VELZ = 3 (GPS)
- EK3_SRC1_YAW = 1 (Brújula)
- EK3_SRC_OPTIONS = 0 (Desactivar FuseAllVelocities)
3. Vuele la aeronaveen modo Loiter durante al menos 10 m (cuanto más alto, mejor, pero dentro de los límites del telémetro).
4. Tire hacia arriba del interruptor auxiliar para iniciar la calibración.
5. Utilice las palancas de balanceo y cabeceo para balancear el avión hacia adelante y hacia atrás en las direcciones de balanceo y cabeceo.
6. Verifique la pestaña " Información " del GCS para obtener el siguiente resultado que confirma la finalización de la calibración.
FlowCal: iniciado
Cal.Flujo: x:0% y:0%
Cal.Flujo: x:66% y:6%
Cal.Flujo: x:100% y:74%
FlowCal: muestras recogidas
FlowCal: escalarx:0,976 ajuste: 0,10 <-- los valores de "ajuste" más bajos son mejores
FlowCal: escalar: 0,858 ajuste: 0,04
Cal.flujo: FLOW_FXSCALER=30.00000, FLOW_FYSCALER=171.0000
7. Aterrice la aeronave y configure EKF3 para usar OpticalFlow .
- EK3_SRC1_POSXY = 0 (Ninguno)
- EK3_SRC1_VELXY = 5 (Flujo óptico)
- EK3_SRC1_POSZ = 1 (Baró)
- EK3_SRC1_VELZ = 0 (Ninguno)
- EK3_SRC1_YAW = 1 (Brújula)
- EK3_SRC_OPTIONS = 0 (Desactivar FuseAllVelocities)
8. Pruebe el avión nuevamente para verificar el rendimiento.
Otra forma de evitar aterrizar y cambiar los parámetros de EKF3 entre la calibración y la prueba es configurar transiciones GPS/No GPS para que el piloto cambie manualmente entre GPS y flujo óptico en vuelo. Suponiendo que el piloto utiliza la entrada de control remoto 8 ( interruptor de 2 posiciones) para iniciar la calibración y la entrada de control remoto 9 ( interruptor de 3 posiciones) para cambiar entre GPS y flujo óptico, la lista completa de parámetros es la siguiente:
- RC8_OPTION = 158 (Calibración de flujo óptimo)
- RC9_OPTION = 90 (EKF Pos Source) el nivel bajo es GPS, el medio es OpticalFlow, el nivel alto no se utiliza
- EK3_SRC1_POSXY = 3 (GPS)
- EK3_SRC1_POSZ = 1 (Baró)
- EK3_SRC1_VELXY = 3 (GPS)
- EK3_SRC1_VELZ = 3 (GPS)
- EK3_SRC1_YAW = 1 (Brújula)
- EK3_SRC2_POSXY = 0 (Ninguno)
- EK3_SRC2_VELXY = 5 (Flujo óptico)
- EK3_SRC2_POSZ = 1 (Baró)
- EK3_SRC2_VELZ = 0 (Ninguno)
- EK3_SRC2_YAW = 1 (brújula)
- EK3_SRC_OPTIONS = 0 (Desactivar FuseAllVelocities)
!Nota
Para utilizar la calibración de vuelo, EKF3 debe estar habilitado . Esta es la configuración predeterminada para ArduPilot 4.1 y superiores.