Directorio de artículos
25.3.2 Conexión al piloto automático
25.3.3 Instrucciones adicionales
25.3.4 Pruebas y configuración
25.3.5 Descripción de parámetros
Prefacio
El sensor de flujo óptico HereFlow es un sensor de flujo óptico liviano que incluye un lidar de corto alcance y utiliza el protocolo CAN para comunicarse con el piloto automático . Esto se puede utilizar para mejorar el control de la posición horizontal, especialmente en entornos sin GPS .
!Advertencia
El lidar incluido con HereFlow tiene un alcance corto, especialmente en exteriores. Recomendamos encarecidamente utilizar lidar de mayor alcance en su lugar .
25.3.1 Dónde comprar
Los sensores están disponibles a través de revendedores de Hex .
25.3.2 Conexión al piloto automático
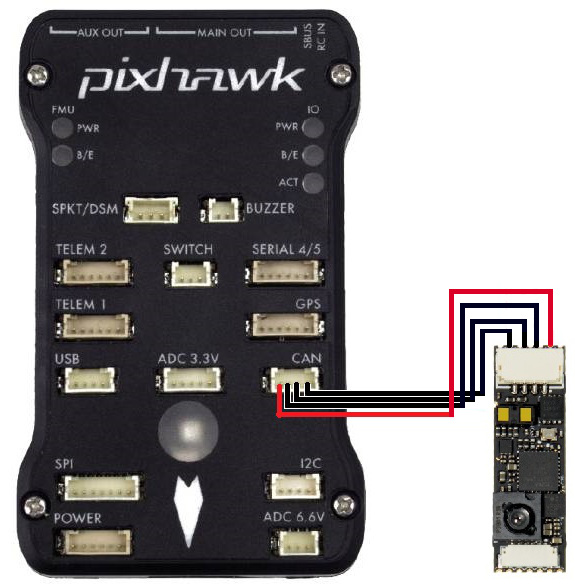
El sensor de flujo óptico debe instalarse en la parte inferior del helicóptero con la lente de la cámara hacia abajo. El lado del sensor con la lente debe mirar hacia la parte delantera de la aeronave.
Conecte el sensor al puerto CAN del piloto automático (si usa un Cube , tenga en cuenta que las placas anteriores a abril de 2019 tienen CAN1 y CAN2 intercambiables).
Establezca FLOW_TYPE = 6 ( DroneCAN ).
Establezca CAN_P1_DRIVER = 1 para habilitar DroneCAN .
Establezca CAN_D1_PROTOCOL = 1 ( DroneCAN ).
Uso de lidar aéreo (no recomendado):
Establezca RNGFND1_TYPE = 24 ( DroneCAN ).
Establezca RNGFND1_MAX_CM = 300 y establezca el alcance máximo del telémetro en 3 m .
25.3.3 Instrucciones adicionales
Al igual que con el sensor PX4Flow , el uso de los modos autónomos de este sensor (incluidos Loiter y RTL ) requiere un telémetro.
FlowHold no requiere el uso de un telémetro.
El rendimiento se puede mejorar configurando los parámetros de posición de los sensores . Por ejemplo, si el sensor está montado 2 cm hacia adelante y 5 cm hacia abajo desde el centro de rotación del marco , establezca FLOW_POS_X en 0,02 y FLOW_POS_Z en 0,05 .
25.3.4 Pruebas y configuración
Consulte Prueba y configuración del sensor de flujo óptico .
25.3.5 Descripción de parámetros
1. FLOW_TYPE : tipo de sensor de flujo óptico
NOTA: Es necesario reiniciar después de realizar el cambio.
| Valores |
||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2. CAN_P1_DRIVER :índice de controlador virtual utilizado con la interfaz CAN física
NOTA: Es necesario reiniciar después de realizar el cambio.
Habilite esta opción para utilizar el bus CAN .
| Valores |
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
3. CAN_D1_PROTOCOL : habilita protocolos específicos en el controlador virtual
Nota: Este parámetro es para usuarios avanzados.
Nota: Es necesario reiniciar después de realizar cambios.
Habilite esta opción para iniciar el protocolo seleccionado que utilizará este controlador virtual.
| Valores |
||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
4. RNGFND1_TYPE : tipo de telémetro
Tipo de telémetro conectado.
| Valores |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
5. RNGFND1_MAX_CM : Distancia máxima del telémetro
La distancia máxima (en centímetros) que un telémetro puede leer de manera confiable.
| Incremento |
Unidades |
|---|---|
| 1 |
centímetros |