mapa de alta definición
Directorio de artículos
- mapa de alta definición
- Prefacio
- ¿Qué es el mapa HD?
- Construcción de motor de distribución de datos de alta precisión.
-
- La relación entre el motor de distribución de datos de alta precisión y las aplicaciones ADAS
- Arquitectura del motor de distribución de datos de alta precisión
- Expresión modelo de motor de distribución de datos de alta precisión.
-
- Abstracción y expresión del modelo de red de carreteras.
- Modelo de atributos del motor de distribución de datos de alta precisión.
- Modelo de información de ubicación del coche.
- Mecanismo de sincronización entre el motor de distribución de datos de alta precisión y el extremo receptor
- El mecanismo de interacción entre el motor de distribución de datos de alta precisión y el extremo receptor.
- Ayudar a la integración de aplicaciones AHP y ADAS
- Construcción de calidad
- Formulario de solicitud de arquitectura típico
- Ejemplos de aplicación de escenarios
- evolución futura
Prefacio
¿Qué es el mapa HD?
La principal diferencia entre los mapas de alta definición (HD MAP) y los mapas electrónicos de navegación ordinarios es que tienen mayor precisión e información más rica. La mayor precisión se refleja principalmente en la mayor precisión de las coordenadas absolutas del mapa de alta precisión (refiriéndose a la precisión entre un objetivo en el mapa y la ubicación de cosas externas del mundo real), que pueden tener una precisión de centímetros. La información más rica se refleja principalmente en los mapas de alta precisión que no solo contienen información de la carretera, sino que también cubren casi toda la información estática circundante relacionada con el tráfico.
En comparación con los mapas electrónicos de navegación ordinarios, los mapas de alta precisión contienen información sobre el tráfico por carretera más rica y precisa. Además, en términos de escenarios de aplicación, los conductores utilizan principalmente mapas de navegación ordinarios, mientras que los mapas de alta precisión están orientados a máquinas y son utilizados por vehículos autónomos.
La precisión es la mayor diferencia entre los mapas de alta precisión y los mapas electrónicos de navegación ordinarios. La precisión de los mapas de navegación electrónicos de vehículos ordinarios es generalmente de unos 10 metros. Cuando se utilizan mapas de alta precisión en el campo de la conducción autónoma, deben ubicarse con precisión en un carril específico y también deben conocer toda la información de tráfico y de las carreteras circundantes. que pueden participar en las decisiones de conducción autónoma. La precisión requiere Alcanzar entre 10 y 20 centímetros, esta precisión es básicamente la misma que el ancho del borde de un carril, para garantizar que los automóviles conducidos de manera inteligente no crucen a otros carriles y eviten el riesgo de Colisiones laterales con otros vehículos.
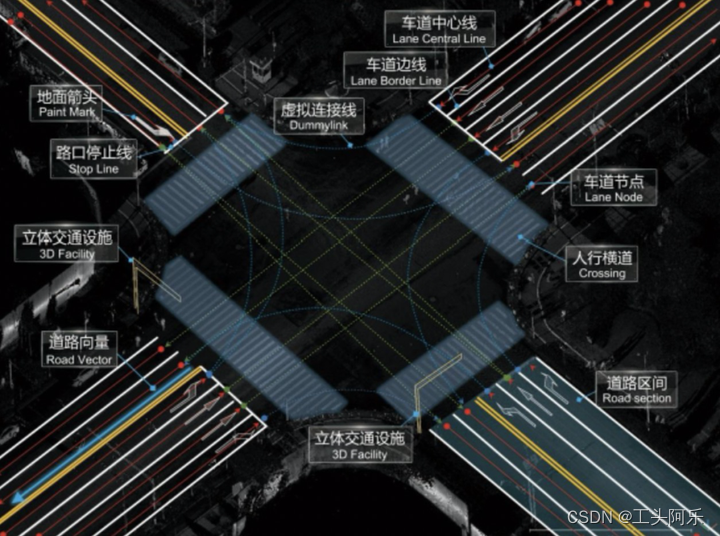
Los mapas electrónicos de navegación ordinarios deben representar las carreteras (enlaces), mientras que los mapas de alta precisión no solo deben representar las carreteras, sino también el número de carriles (carriles) en una carretera, reflejando verdaderamente el estilo real de la carretera.
La información más rica de los mapas de alta precisión se refleja principalmente en los siguientes aspectos:
forma precisa de la carretera: datos de pendiente, curvatura, rumbo, elevación y balanceo de cada carril.
Información detallada sobre las líneas de los carriles: se describirá si las líneas de los carriles entre carriles son líneas de puntos, líneas continuas o líneas amarillas dobles, el color de las líneas, los cinturones de aislamiento de la carretera y el material de los cinturones de aislamiento.
Además, los cruces de peatones, vallas publicitarias a lo largo de la carretera, señales de límite de velocidad, semáforos, cabinas telefónicas al borde de la carretera, etc., a los que a menudo se hace referencia colectivamente como Objetos LandMark, tienen coordenadas geográficas absolutas, dimensiones físicas y sus características únicas que también aparecerán. en datos de alta precisión.
Motor de distribución de datos de alta precisión
Las aplicaciones ADAS (Sistema avanzado de asistencia al conductor) requieren la red de carreteras y la información de datos de atributos delante del vehículo para el control y el juicio de la toma de decisiones. Los datos de mapas digitales ordinarios generalmente solo los utiliza el sistema de navegación, pero los datos de mapas de alta precisión pueden ser utilizado en el vehículo. Es utilizado por otras aplicaciones ADAS, por lo que debe depender de datos de alta precisión y un motor de distribución de datos de alta precisión para la transmisión de datos de alta precisión.
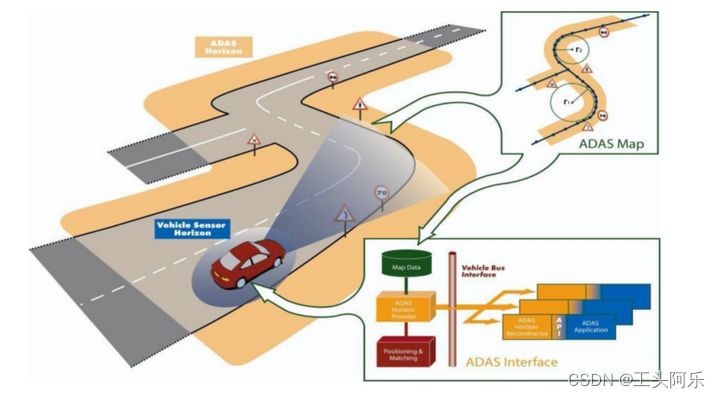
ADASIS (Especificación de interfaz ADAS) define el concepto de "ADAS Electronic Horizon", que expresa la red de carreteras frente al vehículo y la información de atributos de la red de carreteras. Para realizar esta expresión, necesitamos construir el modelo de posición del vehículo y los posibles modelos de carreteras de la red de carreteras frente al vehículo. Las carreteras accesibles se pueden expresar a través de una estructura jerárquica en forma de árbol. Además, la forma geométrica y los atributos relacionados de la carretera también se expresarán mediante el establecimiento de modelos de atributos relacionados. Los datos de "ADAS Electronic Horizon" se serializan y transmiten a través de la red Ethernet del vehículo.
1.3 Definición de términos
1. ADAS (Sistema avanzado de asistencia al conductor)
Es decir, el sistema avanzado de asistencia a la conducción utiliza sensores a bordo para detectar el entorno del vehículo e integra cálculos para permitir al conductor detectar posibles peligros con anticipación, mejorando efectivamente la seguridad, la economía y la comodidad de la conducción del vehículo.
ADASIS (Especificación de interfaz del sistema avanzado de asistencia al conductor)
es un estándar internacional de la industria desarrollado por el Foro ADAS, que se utiliza para estandarizar el protocolo de interfaz estándar para el intercambio de datos de mapas entre datos de mapas y aplicaciones ADAS de vehículos.
AHP (ADAS Horizon Provider)
es un motor de distribución de datos de alta precisión que proporciona información de datos y carreteras más allá de la línea de visión para aplicaciones ADAS.
AHR (ADAS Horizon Reconstructor)
se utiliza para analizar los mensajes enviados por AHP y reconstruir datos de mapas para su uso por el módulo de aplicación ADAS del terminal.
2. ¿Por qué se necesita un motor de distribución de datos de alta precisión?
El motor de distribución de datos de alta precisión sirve como puente entre los datos de alta precisión y las aplicaciones ADAS. Su valor se puede resumir en los siguientes aspectos: la
necesidad de una distancia de visión de largo alcance para la conducción autónoma. Como sensor de mapas para la conducción autónoma. Los mapas de alta precisión pueden proporcionar una visión más confiable sobre el horizonte y un rango de distancia para respaldar juicios de toma de decisiones más confiables. La necesidad de mejorar la precisión y la transición de guías a vehículos guiados han aumentado los requisitos de precisión. Estandarización de interfaz para distribución de datos de mapas de alta precisión.
Construcción de motor de distribución de datos de alta precisión.
La relación entre el motor de distribución de datos de alta precisión y las aplicaciones ADAS
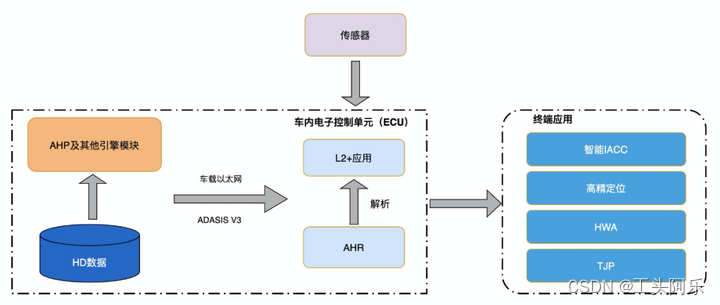
El motor de distribución de datos involucra los siguientes componentes e interacciones:
AHP
AHR
ADASIS V3 Protocolo
Aplicación ADAS; consulte el departamento de aplicaciones de terminal en la figura anterior para obtener más detalles.
Arquitectura del motor de distribución de datos de alta precisión
El motor de distribución de datos de alta precisión consta de múltiples capas, incluida la capa del motor, la capa de organización del protocolo y la capa de adaptación del sistema. La plataforma relevante y el soporte de herramientas se muestran en la siguiente figura: Capa del motor: carga, análisis y datos de la red de carriles de organización de datos de alta precisión
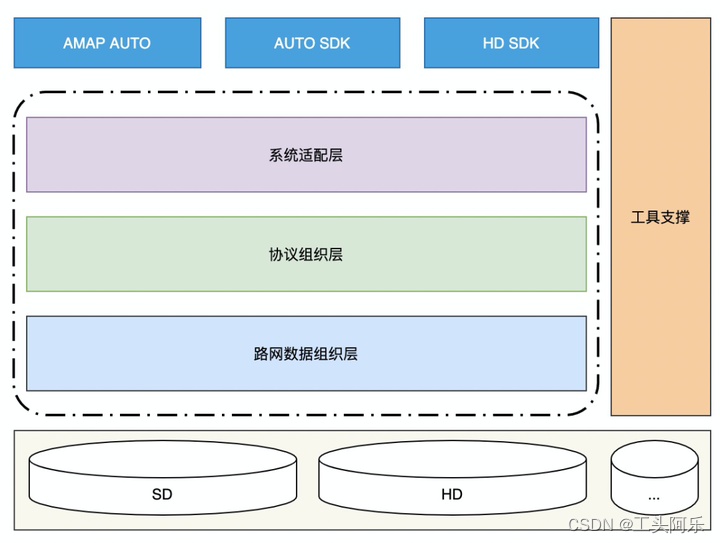
.
Capa de protocolo: ensambla principalmente mensajes de protocolo con datos proporcionados por la capa del motor y los entrega a la capa de adaptación.
Capa de adaptación: Principalmente responsable de acoplar e interactuar con el sistema y distribuir los datos del protocolo de la organización a las aplicaciones ADAS.
Expresión modelo de motor de distribución de datos de alta precisión.
Abstracción y expresión del modelo de red de carreteras.
El modelo de red de carreteras del motor de distribución de datos incluye tres capas de abstracción del modelo: primero, el modelo del mundo real se abstrae en un modelo de red de carreteras de alta precisión, y luego el modelo de red de carreteras de alta precisión se organiza aún más y se divide en un árbol. modelo expresado por Path y Offset.
Expresión del modelo abstracto del mundo real
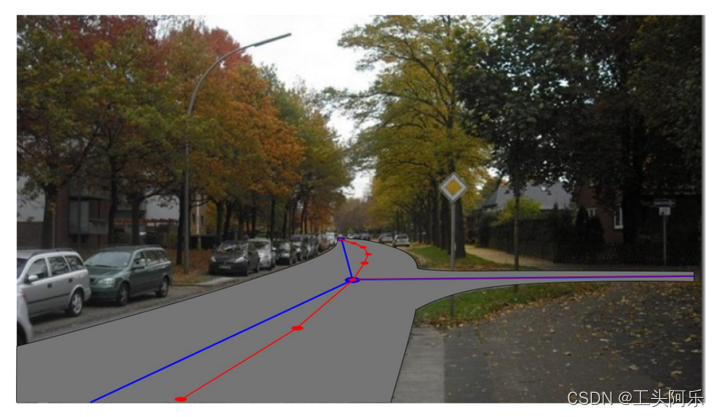
Modelo de mapa digital y ruta de navegación establecida por el usuario, expresión de elementos del mapa Expresión de la
posición del vehículo y red de carreteras en el modelo de mapa digital Expresión del
 modelo de red de carreteras cerca de la posición del vehículo a través de enlaces a Expresar la relación entre la relación de conexión de la red de carreteras. En las bases de datos de mapas digitales, una red de carreteras se representa como un conjunto de conexiones y nodos que definen los vínculos entre ellas.
modelo de red de carreteras cerca de la posición del vehículo a través de enlaces a Expresar la relación entre la relación de conexión de la red de carreteras. En las bases de datos de mapas digitales, una red de carreteras se representa como un conjunto de conexiones y nodos que definen los vínculos entre ellas.
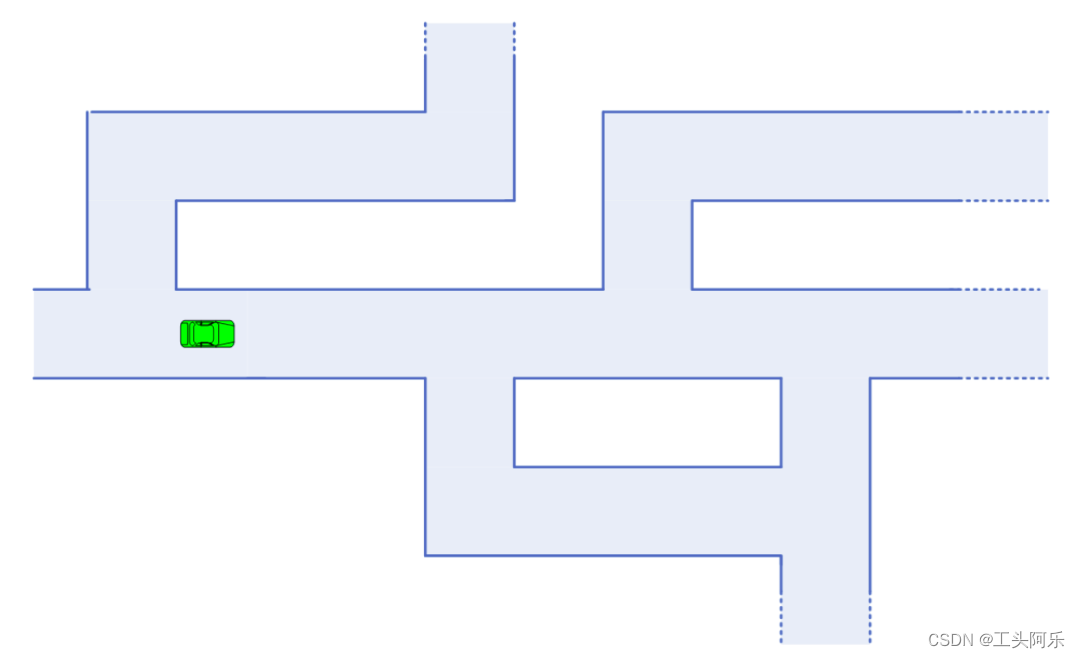
Desde la perspectiva de las aplicaciones ADAS, la red de carreteras detrás del vehículo no está involucrada, por lo que el motor de distribución de datos está compuesto por la red de carreteras delante del vehículo.
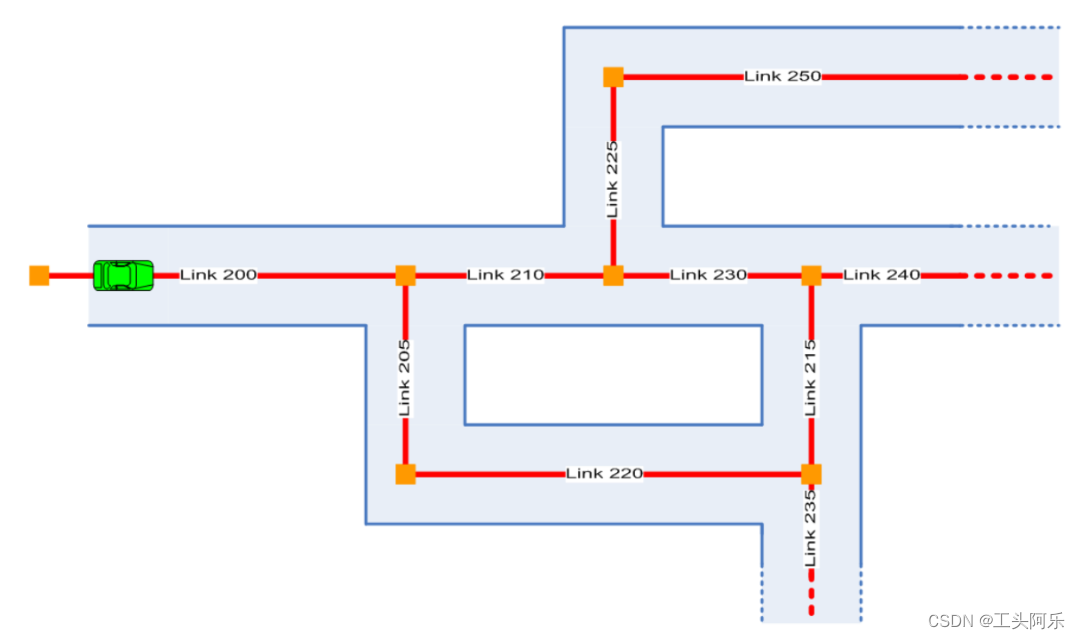
La red de carreteras delante del vehículo está organizada por Camino, y cada Camino es un conjunto de enlaces. Los datos de la red de carreteras delante del coche se pueden expresar mediante dos algoritmos.
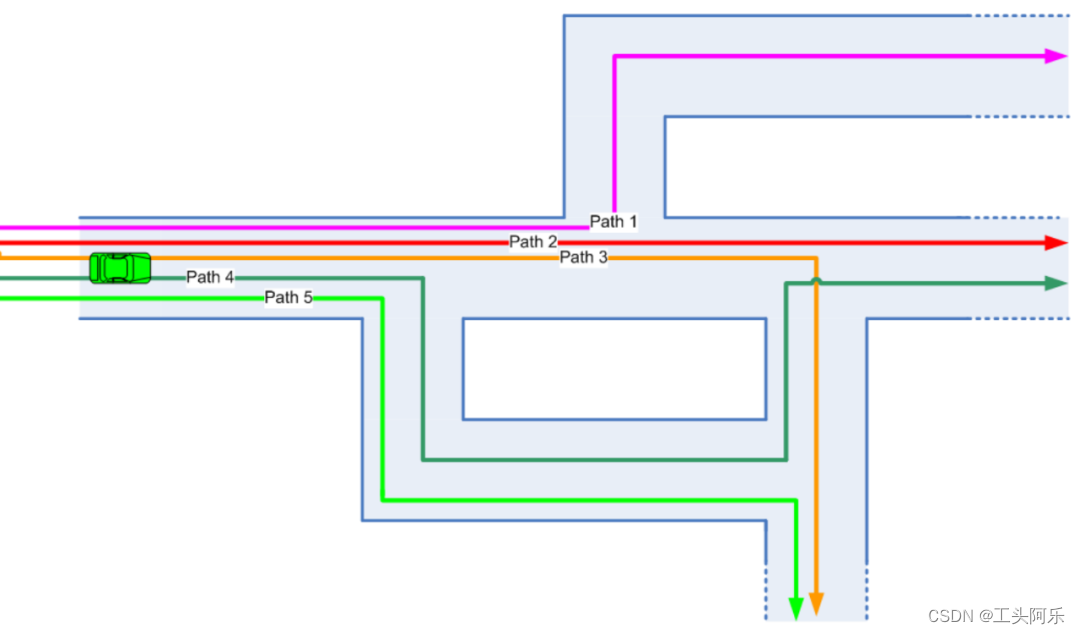
En el método de ruta simple, a partir del enlace donde se encuentra el vehículo, cada ruta transitable se expresa de forma independiente como una ruta. El
 método de organización de ruta optimizada reduce la redundancia de datos y también puede expresar completamente los datos de la red de carreteras frente al vehículo.
método de organización de ruta optimizada reduce la redundancia de datos y también puede expresar completamente los datos de la red de carreteras frente al vehículo.
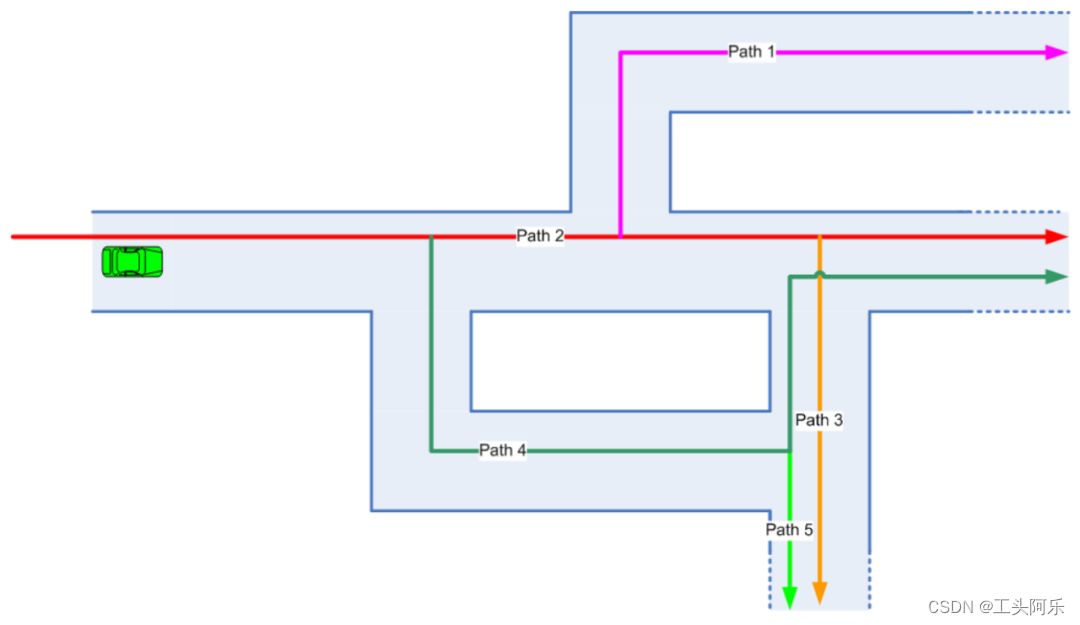 Por lo tanto, el motor de distribución de datos describe la forma de la red de carreteras frente al vehículo y su entorno circundante como una colección de diferentes atributos de datos de rutas y mapas para formar un árbol de predicción. Este árbol de predicción está conectado por múltiples caminos, cada camino representa una parte del camino y la intersección entre caminos.
Por lo tanto, el motor de distribución de datos describe la forma de la red de carreteras frente al vehículo y su entorno circundante como una colección de diferentes atributos de datos de rutas y mapas para formar un árbol de predicción. Este árbol de predicción está conectado por múltiples caminos, cada camino representa una parte del camino y la intersección entre caminos.
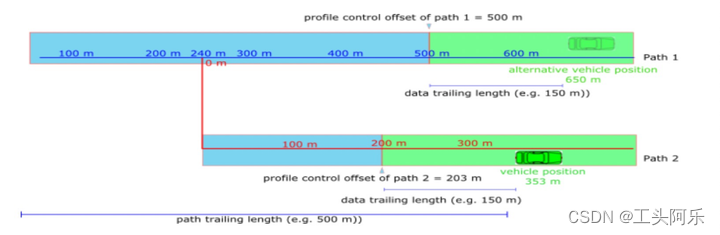
Una vez que un vehículo se mueve y cambia su posición, la vista prevista también cambia, se pueden eliminar algunos caminos detrás del vehículo o se pueden agregar otros nuevos delante del vehículo. Las características del trazado se expresan como un conjunto de atributos, como número de carriles, forma geométrica, curvatura, etc., incluidos en la propia red de autopistas y autopistas urbanas. La posición de un atributo en una ruta está representada por un conjunto de valores de desplazamiento, que son marcadores de distancia que definen la distancia absoluta a lo largo de la ruta misma, expresada en centímetros. El origen de una ruta es el punto de valor de desplazamiento cero, y el valor de desplazamiento de un atributo representa la distancia entre el atributo mismo y el origen de la ruta. Si la ruta se inició recientemente y no tiene una ruta principal, el valor de compensación 0 es la posición inicial del vehículo.
Modelo de atributos del motor de distribución de datos de alta precisión.
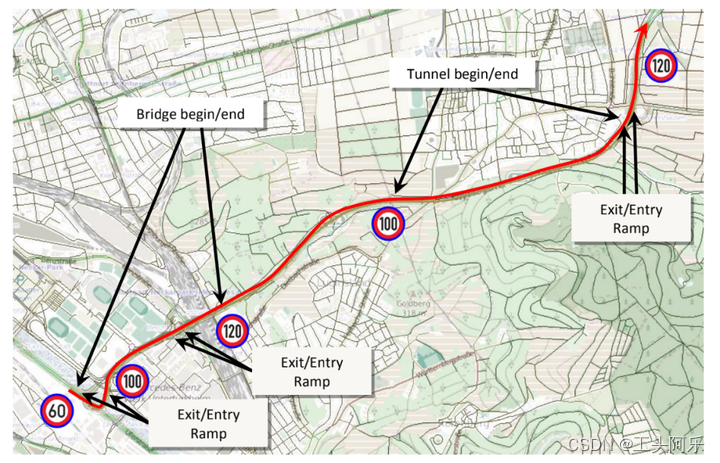
Los datos del modelo de atributos del motor de distribución de datos provienen de la información de atributos en la red de carreteras de alta precisión, que se define como expresada a lo largo del Camino y definida como la posición en el Camino, expresada a través de Desplazamiento. Por ejemplo, el atributo Límite de velocidad proporciona valores de límite de velocidad para puntos en una ruta.
El modelo de atributos se puede dividir en los siguientes tres tipos diferentes según el tipo de interpolación, a saber, tipos puntuales, escalonados y lineales. Los
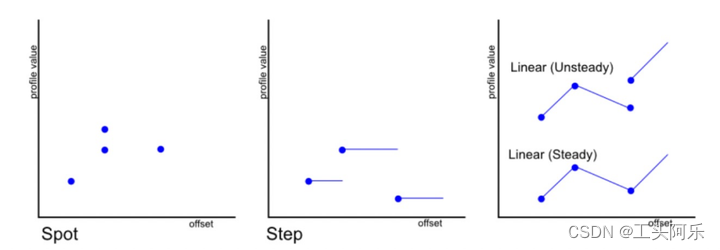
atributos de tipo puntual solo son válidos en una posición de desplazamiento determinada dentro de la ruta, y la diferencia en los atributos se expresa mediante diferentes Posiciones compensadas. Por ejemplo, un semáforo se puede definir como un atributo de tipo Punto porque se puede expresar como la existencia de este atributo de punto en una determinada posición en la Ruta. Un atributo de tipo
Paso se define para ser válido hasta la posición de Desplazamiento del siguiente atributo. . El atributo se expresa como un valor en el rango desde Desplazamiento hasta Desplazamiento final en la ruta.
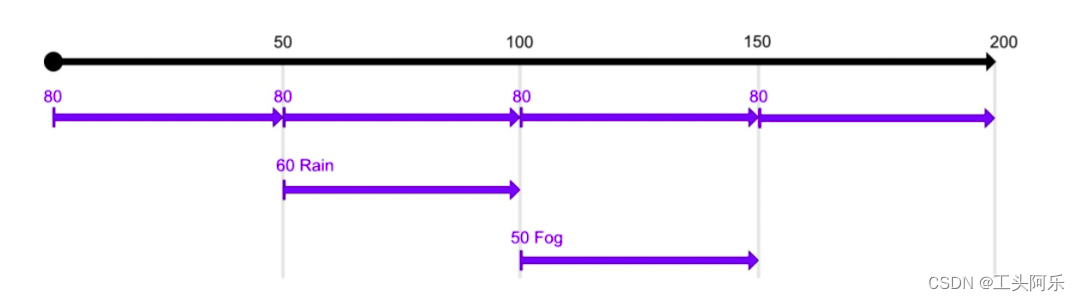
En el ejemplo que se muestra arriba, la longitud de la ruta es 200. El límite de velocidad 80 es válido en general, desde Offset 0 a 200. Hay dos valores límite de velocidad a partir del desplazamiento 50 y 100. Por tanto, la distribución de atributos en todo el gráfico es la siguiente:
Compensación 0: valor límite de velocidad inicial 80. Compensación 50: se introduce el valor límite de velocidad de 60 en días lluviosos y el límite de velocidad de 80 continúa. Compensación 100: repita el límite de velocidad 80, agregue el límite de niebla 50, finalice con el límite de velocidad 60 bajo lluvia. Desplazamiento 150: repetir el límite de velocidad 80, terminar con el límite de velocidad 50 en la niebla.
Las propiedades de tipo Lineal se definen como diferencias lineales entre posiciones dadas.
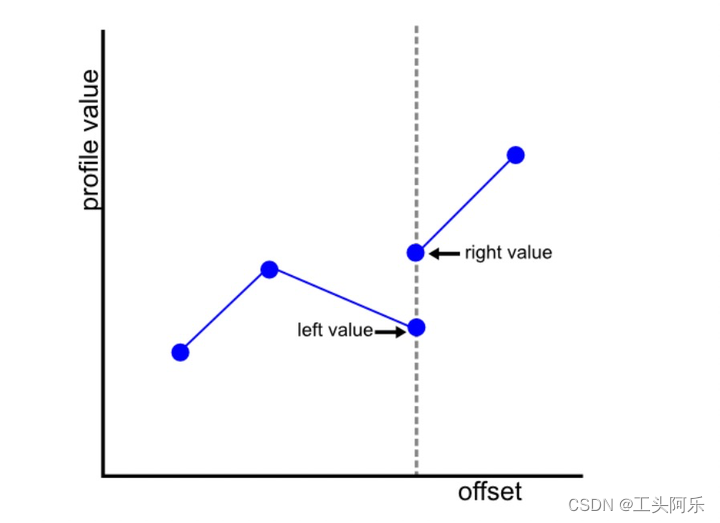
Los atributos de interpolación lineal no se expresan continuamente. En el mismo desplazamiento, el valor de la izquierda y el valor de la derecha son diferentes. El modelo de atributos utiliza el siguiente método para expresar dichos valores de atributos discontinuos.
En Offset, almacene un atributo, el valor almacena el valor del atributo a la izquierda y EndOffset es 0. Almacena una propiedad en el mismo Desplazamiento y el valor almacena el valor de la propiedad a la derecha, pero EndOffset > Desplazamiento
Modelo de información de ubicación del coche.
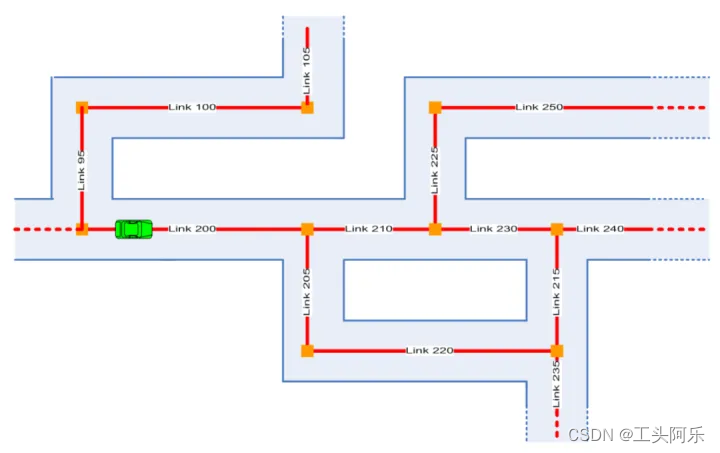
En el motor de distribución de datos, la información de ubicación del automóvil se puede expresar mediante Ruta y Desplazamiento. En caso de incertidumbre, la ubicación del automóvil puede existir en múltiples rutas, por lo que se necesita un conjunto para describir la información de ubicación del automóvil. La siguiente información se puede expresar a través de la información de posición del automóvil:
si la información del automóvil está fuera del área de datos. Si la información del automóvil coincide con el rango de datos de Path. Si la información del automóvil coincide con múltiples rutas. Si la información del vehículo entra o sale del área de datos.
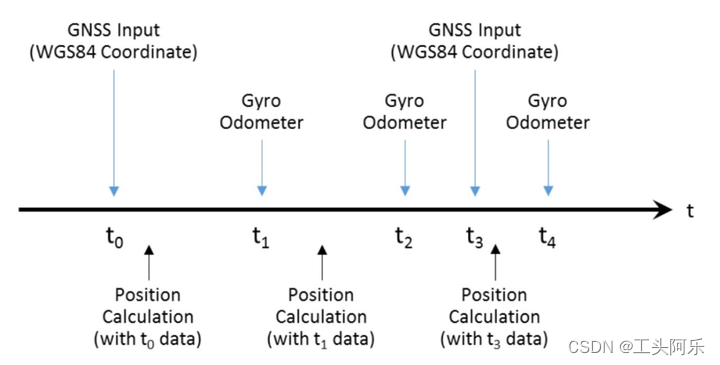
El valor TimeStamp de la información de posición del vehículo expresa el valor de tiempo en el que se recibe la información del sensor.
 La información de posición del vehículo también puede expresar el camino más probable a seguir.
La información de posición del vehículo también puede expresar el camino más probable a seguir.
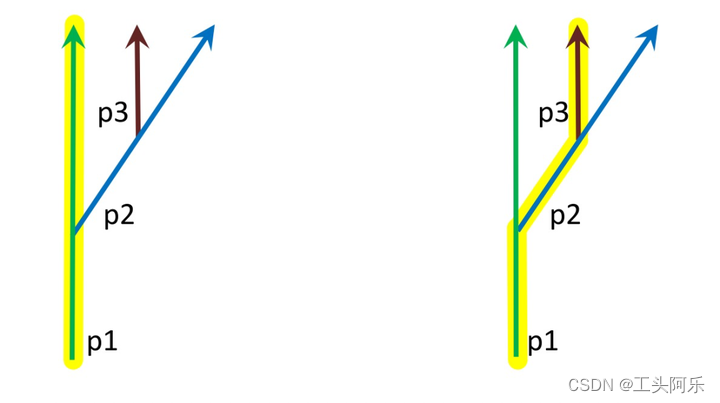
Como se muestra en la imagen de arriba, el camino posible a la izquierda es P1, y en la imagen de la derecha es P3.
Mecanismo de sincronización entre el motor de distribución de datos de alta precisión y el extremo receptor
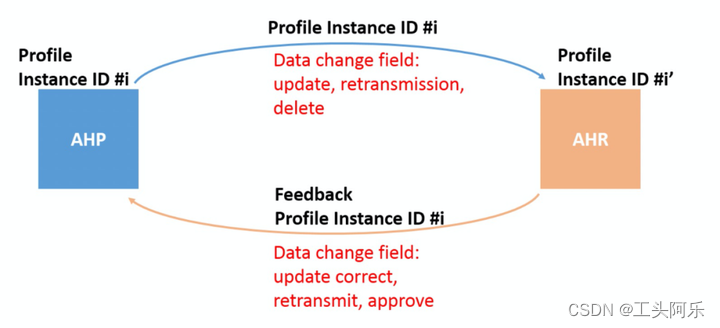
El motor de distribución de datos sincroniza los datos de ruta de la red de carreteras entre AHP y AHR a través de mensajes pathControl.
Cuando el mensaje PathControl no contiene una determinada ruta, AHR elimina la ruta en la red de carreteras después de recibir el mensaje. Cuando el mensaje pathControl permanece sin cambios desde la última vez, AHR mantiene la red de carreteras actual sin cambios después de recibir el mensaje. Cuando un mensaje de PathControl agrega una determinada ruta, AHR agrega la información de la ruta después de recibir el mensaje
y sincroniza los datos del atributo a través de perfilControl.
El mecanismo de interacción entre el motor de distribución de datos de alta precisión y el extremo receptor.
El motor de distribución de datos (AHP) y el extremo receptor (AHR) tienen los siguientes mecanismos de interacción:
modo de transmisión solicitud/modo de suministro modo de suscripción/publicación.
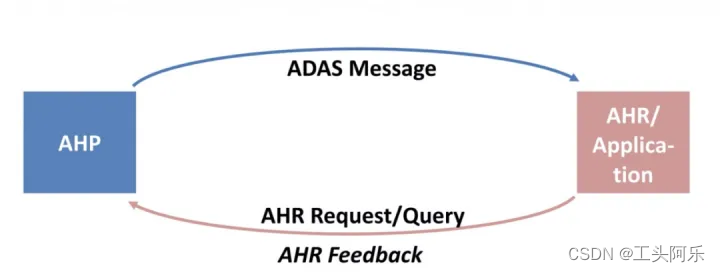
El motor de distribución de datos de alta precisión actual utiliza el método "solicitar/proporcionar". Mensajes ADAS, AHR puede solicitar y retroalimentar información.
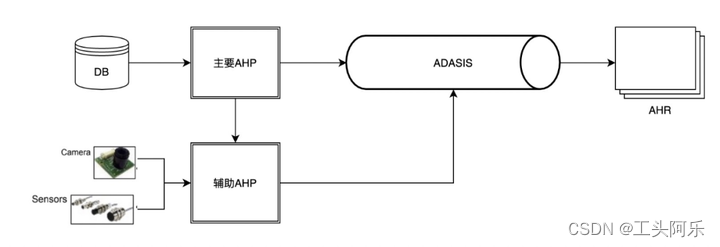
Ayudar a la integración de aplicaciones AHP y ADAS
AHP principal y AHP auxiliar
No todos los datos del protocolo ADASIS los proporciona el motor de distribución de datos y también se puede agregar un motor AHP auxiliar. Los motores AHP auxiliares pueden enviar información de sensores o información de fusión de sensores.
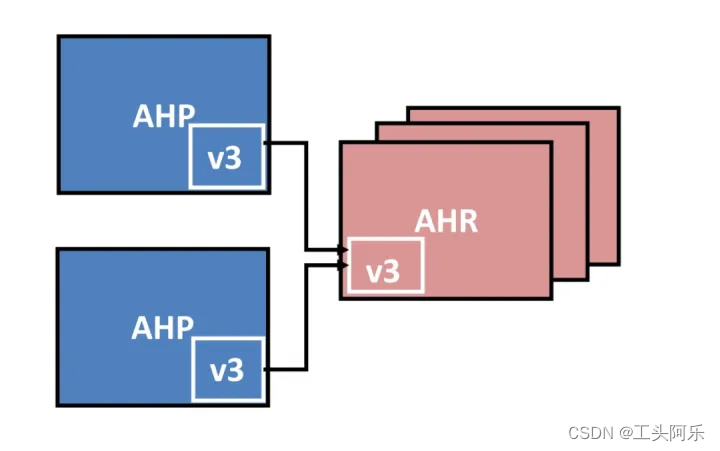
Se forman el motor de distribución de datos principal y el motor AHP auxiliar.
Dos métodos de integración de aplicaciones ADAS
Según los motores AHP principal y AHP auxiliar, se pueden realizar dos tipos de métodos de integración de aplicaciones ADAS, a saber, integración descendente e integración ascendente.
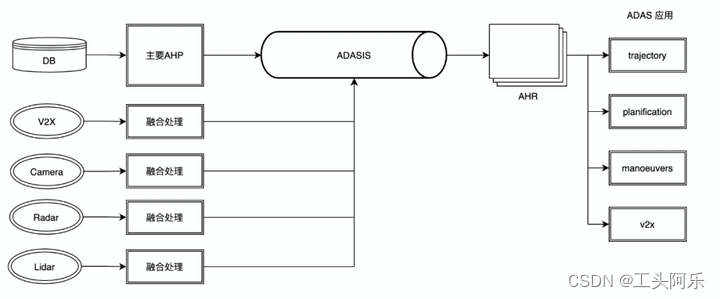
Integración aguas abajo
No hay procesamiento de fusión en el lado AHP. Los datos de cada sensor y los datos del mapa de alta precisión se transmiten al lado AHR a través de la comunicación para el procesamiento de fusión y luego se pasan a la aplicación de función ADAS.
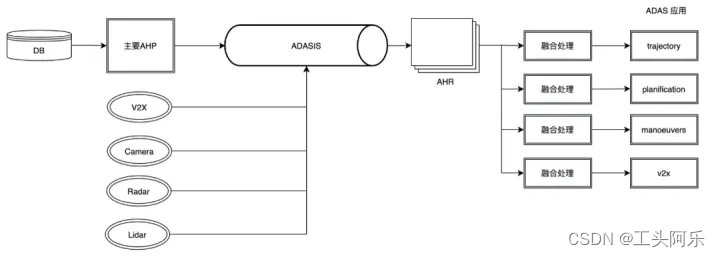
La fusión ascendente
realiza el procesamiento de fusión en el lado AHP y pasa los resultados de la fusión a AHR para su procesamiento a través del protocolo, lo que afecta directamente la función ADAS.
Construcción de calidad
Para garantizar la calidad del software, se utilizan los siguientes medios técnicos en la construcción de motores de distribución de datos de alta precisión: pruebas
unitarias pruebas de función herramientas de inspección de calidad
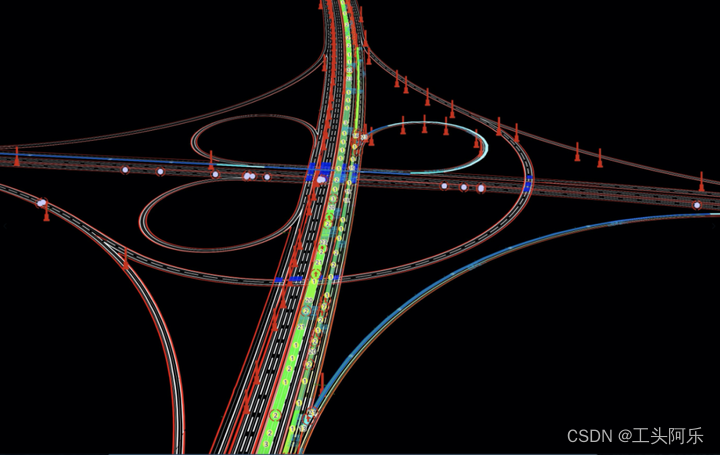
herramientas de visualización
capturas de pantalla de herramientas de visualización
Formulario de solicitud de arquitectura típico
Según la arquitectura del motor de distribución de datos de alta precisión, se puede dividir en las siguientes formas de integración:
El motor de distribución de datos (es decir, el motor EHP) está integrado en el cuadro del mapa.
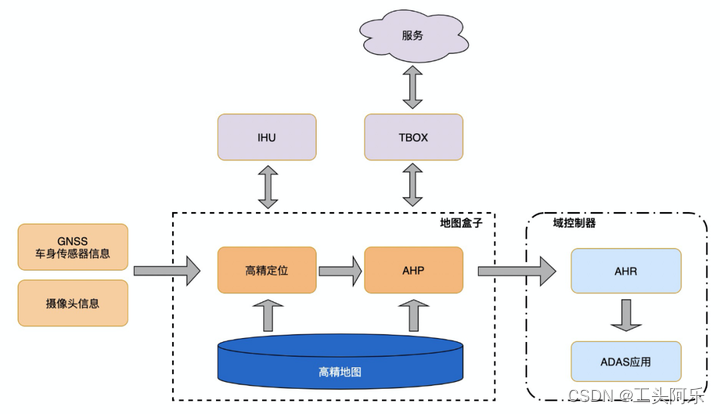
El concepto de caja de mapas
es un producto de software y hardware integrado para automóviles que incluye capacidades de "datos de mapas + posicionamiento de alta precisión", que es diferente de los productos de software puro. (Todos los siguientes nombres se refieren al cuadro de mapas de alta precisión: Cuadro de posicionamiento/MAP ECU/MAP BOX/HDLM...entre ellos L:Localización M:Módulo)
incluidos
mapas de contenido y aplicaciones relacionadas: datos HD, AHP, posicionamiento, OTA...Software básico: sistema, controlador de nivel inferior, diagnóstico...Hardware básico: sistema en chip (SoC), memoria, almacenamiento, IMU (opcional), carcasa protectora...Interfaz de red y comunicación: CAN /Entrada Ethernet, salida Ethernet, interfaz USB... Características de la solución y clara división
del
trabajo: las empresas automovilísticas pueden utilizar esta arquitectura para desmantelar funciones en pequeños módulos y presentar requisitos de producto para gestión y control, respectivamente, para evitar no poder empezar con un solución de caja completamente negra. Los proveedores pueden ser reemplazados cuando se encuentren riesgos de entrega.
Consideraciones de seguridad funcional: detalles como la selección de chips, el diseño de hardware, la seguridad de la red y el diagnóstico del sistema pueden dejarse en manos de proveedores profesionales; existen incertidumbres en los niveles de seguridad funcional, como la calidad de los mapas, las actualizaciones en línea y el backhaul, y es necesario comunicarse con ellos. AD ECU Aislado para permitir que AD ECU cumpla con los requisitos de seguridad funcional.
Facilita la gestión de productos de alta y baja gama: puedes elegir productos con diferentes configuraciones de los proveedores.
Reduzca la carga de potencia informática en los controladores de dominio: facilite la búsqueda de hardware de seguridad funcional que cumpla con los requisitos de potencia informática.
Integrado en IHU
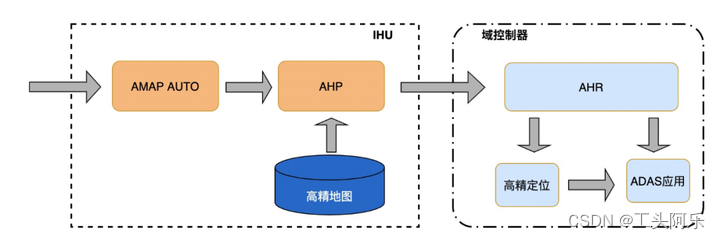
Características de la solución
: Reducción de costos: no se requieren módulos de hardware adicionales.
Integre la solución V2 y reduzca la incertidumbre: AHP V2 está principalmente en el lado del automóvil y la solución ya se ha ejecutado, por lo que utilizar un método similar para mapas y V3 puede evitar la incertidumbre de la nueva arquitectura.
Es fácil avanzar debido a razones internas de las compañías automotrices: para algunas compañías automotrices, si el departamento de mapas de navegación y planificación comercial de mapas de alta precisión promueve la solución de caja de abajo hacia arriba, provocará cambios importantes en la estructura general y Será difícil avanzar.
Integrado dentro del controlador de dominio
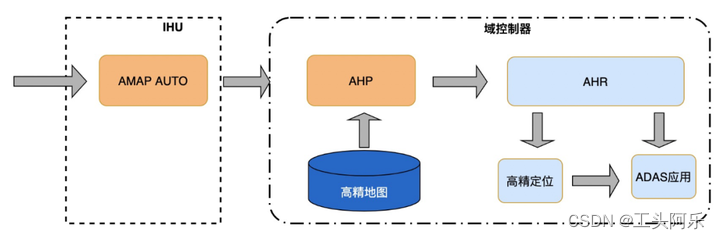
Características de la solución
: Reducir la ocupación del ancho de banda de la red del vehículo mediante comunicación entre dominios: la mayoría de los sensores utilizados para la detección están conectados a controladores de dominio. Si el mapa y el posicionamiento se colocan en el controlador de dominio, se pueden utilizar aplicaciones de back-end. directa o indirectamente sin comunicación entre dominios Mapas para reducir el uso del ancho de banda de la red en el vehículo.
Más adecuado para las empresas de automóviles que toman la ruta de la autoinvestigación y eligen una solución general: para las empresas de automóviles que toman la ruta de la autoinvestigación y eligen un único proveedor de soluciones para proporcionar una solución completa, no es necesario implementar módulos funcionales por separado.
Ejemplos de aplicación de escenarios
Aplicaciones de posicionamiento de alta precisión
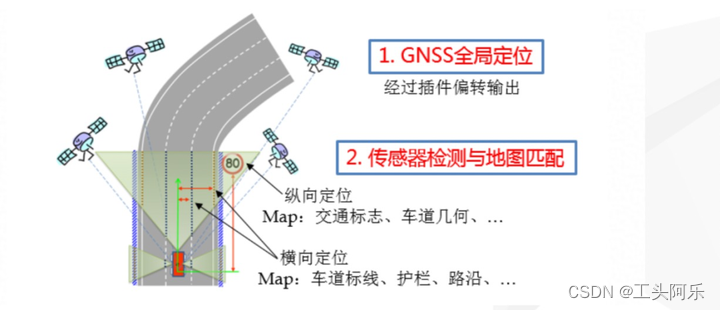
Combinado con datos de alta precisión para ayudar al posicionamiento horizontal y vertical.
El posicionamiento vertical se combina principalmente con información relevante, como objetos de señales de tráfico y geometría de carril, mientras que el posicionamiento horizontal se combina principalmente con información relevante, como líneas de carril y barandillas.
Las aplicaciones de seguridad activa a menudo combinan información de sensores (radar de ondas milimétricas, cámara) y datos de mapas para compararlos y corregirlos, mejorando así la precisión del posicionamiento.
Conducción autónoma de alta velocidad (HWP)
El entorno de conducción para la activación de la función
se basa principalmente en el criterio del mapa: (1) Autopista y City Express; (2) Líneas de carril claras; (3) Curvatura y pendiente; (4) Ningún objeto o evento que active alarmas o frenado: incluida la carretera dinámica. ambientes; (5) ) no es de noche y las condiciones climáticas son buenas (la visibilidad es de más de 200 metros).
Función de implementación
Tome como ejemplo el control lateral de crucero de este carril y el estacionamiento autónomo de este carril en escenarios anormales:
Tipo de carril: la conducción autónoma se basa en el tipo de carril para dividir el área de conducción. Si el tipo es incorrecto, el vehículo conducirá en la zona de no circulación, lo que traerá consecuencias para el propio vehículo, potenciales riesgos para la seguridad, al mismo tiempo, en el escenario de estacionamiento seguro autónomo, si el tipo de carril es incorrecto, conducirá directamente a la pérdida de autonomía y Seguridad del estacionamiento seguro autónomo. Tipo de línea de carril: la cámara auxiliar realiza el reconocimiento de línea de carril; la compara con la cámara para mantenerse en el carril.
Crucero automático basado en la ruta de navegación.

Activación de la función
: El entorno de trabajo depende del criterio del mapa:
nivel de la carretera: autopista/manzana de la ciudad. Si PartOfcalculateRoute (identificación de la ruta de navegación) es continua sin interrupción. Tipo de clima: Las condiciones climáticas soleadas/lluvia ligera/nublada permiten activar la función.
Función de implementación:
al subir o bajar del JCT, determinará si subir o bajar del JCT en función de la marca de la ruta de navegación y la red de carreteras frente al vehículo, y recordará al lado de la rampa de cambio de carril con anticipación. . Al cambiar automáticamente de carril a JCT o incorporarse a una autopista, la cámara auxiliar reconocerá la línea del carril de acuerdo con la línea del carril y la comparará con la cámara para detectar y comparar la forma de la línea para determinar el momento del cambio de carril del vehículo.
evolución futura
Por un lado, considerar una mayor integración del diseño arquitectónico de AHP V2 y V3 para ayudar mejor a la conducción autónoma. Además, como parte del circuito cerrado de datos, se enriquecen las capacidades de suministro y reciclaje de datos.
Link de referencia