Directorio de artículos
1 imagen
La imagen es generada por la cámara, que asigna los puntos de coordenadas (en metros) en el mundo tridimensional al plano de la imagen bidimensional (en píxeles)
Desventajas de las imágenes: el mapeo 3D a 2D pierde información espacial. En comparación con la recopilación de ángulos de visión 360 de nube de puntos, la cámara única montada en el vehículo tiene limitaciones de ángulo de visión.
Ventajas de las imágenes: rica textura, bajo costo
Las tareas basadas en imágenes y los modelos básicos son relativamente maduros y completos, y son relativamente fáciles de extender a los algoritmos de percepción de BEV.
1.1 ¿Cómo obtener las características de la imagen?
Utilice una red de procesamiento de imágenes 2D para extraer características de la imagen.
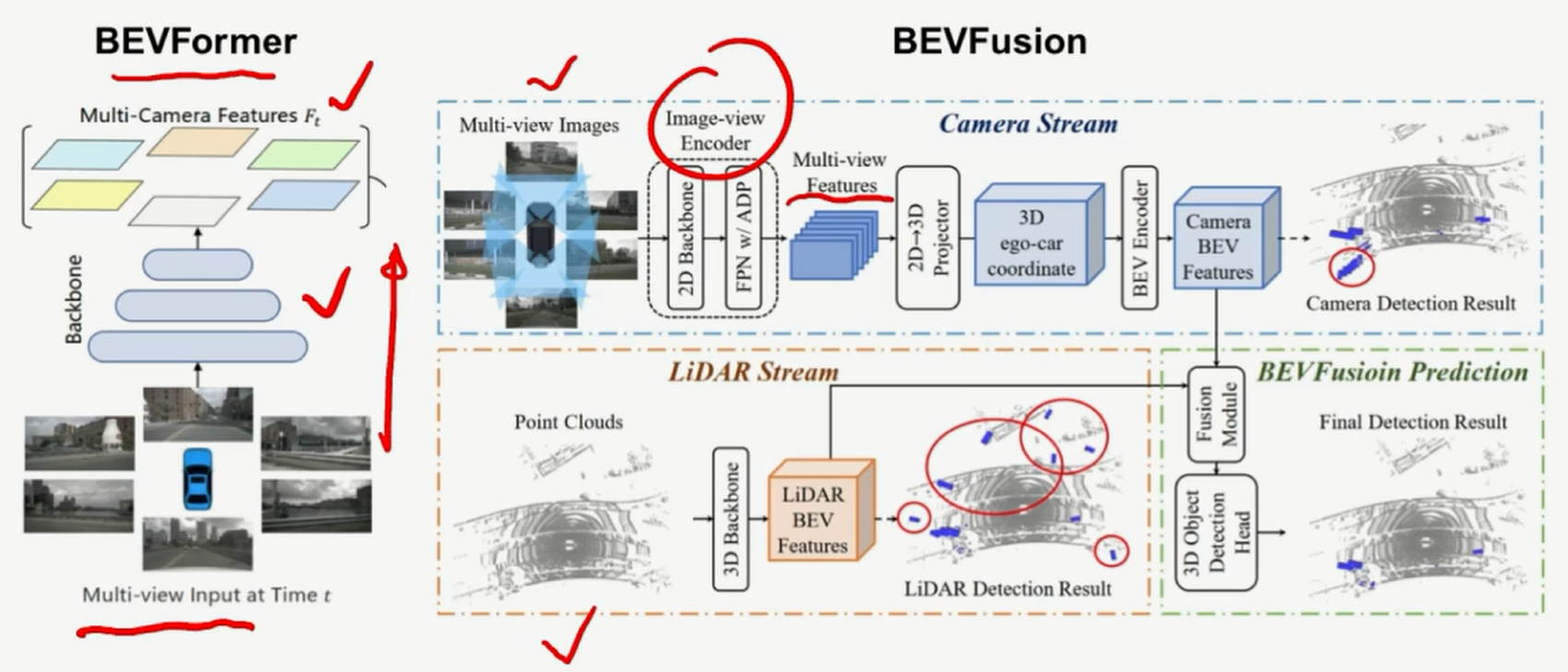
Ya sea la columna vertebral en BEVFormer o el codificador en BEVFusion, la esencia es la misma y las características de la imagen se extraen a través de redes de imágenes 2D existentes, como Resnet.
nubes de 2 puntos
La unidad básica de una nube de puntos es un punto, y una colección de puntos se llama nube de puntos.
Características de la nube de puntos: escasez, desorden, representación 3d.
2.1 Escasez
1 sombra lo que da como resultado datos de nube de puntos faltantes.
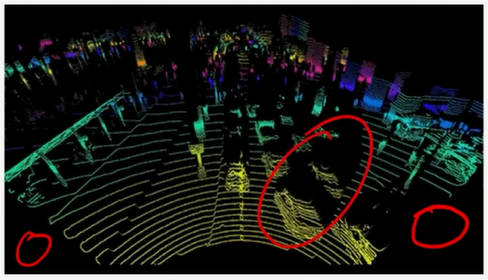
La divergencia de 2 rayos conduce a un intervalo de muestreo de larga distancia (muestreo faltante) y a un intervalo de muestreo de corta distancia
2.2 Desorden
{1,2,3,4,5} = {1,4,5,3,2}
2.3 ¿Por qué utilizar la nube de puntos?
Las nubes de puntos contienen información de profundidad.
2.4 ¿Cómo extraer características de la nube de puntos?
Independientemente del método de extracción que se utilice, no se trata de una extracción de características de un solo punto (sin sentido), sino que se utiliza un determinado método de agregación.
Por ejemplo, el muestreo de un solo punto en la nube de puntos no puede determinar si el punto individual pertenece a un automóvil o a una persona, y debe juzgarse en combinación con cierta información espacial local.
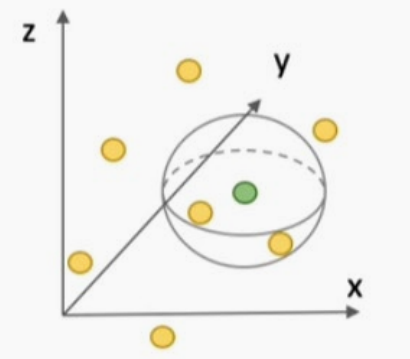
basado en puntos
Seleccione algunos puntos clave de la nube de puntos existente, puntos clave (verde) y puntos cercanos (amarillo dentro de la bola)
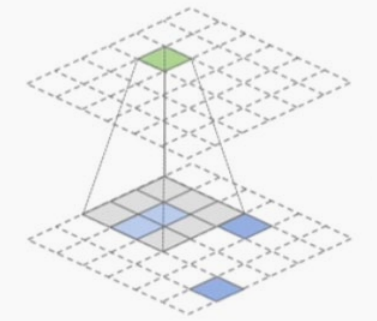
basado en vóxeles
A partir de la escena, la escena se divide en muchos bloques pequeños y se agregan los puntos dentro de un cierto rango espacial. (Por ejemplo, la siguiente cuadrícula de 3x3 se agrega a la cuadrícula anterior)