
Este artículo continuará analizando las tecnologías centrales involucradas en la conducción autónoma para todos. El contenido de la "Percepción" anterior se puede ver en el texto histórico original:
2. Toma de decisiones
En un sistema de tecnología de conducción autónoma relativamente maduro, si el módulo de percepción ambiental se compara con los ojos y oídos humanos, entonces el módulo de planificación de decisiones es equivalente al cerebro de un vehículo autónomo.
Al tomar decisiones y planificar, los vehículos autónomos obtendrán información sobre la topología de la carretera, información del tráfico en tiempo real, información sobre obstáculos (participantes del tráfico) e información sobre el estado del propio vehículo del módulo de percepción ambiental.
Combinando la información anterior, el sistema de planificación de la toma de decisiones analizará el entorno actual y luego emitirá instrucciones al módulo de ejecución del control subyacente.Este proceso es la tarea principal del módulo de planificación de la toma de decisiones. 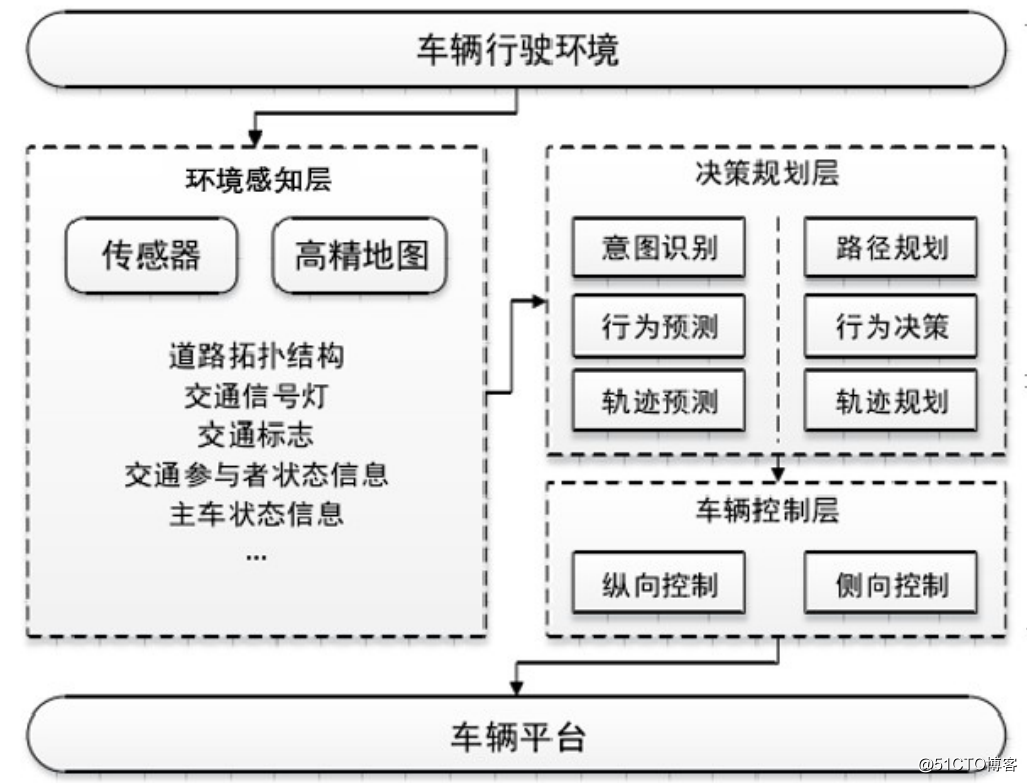
Diagrama de arquitectura del vehículo autónomo (fuente de la imagen: ver referencia 3)
En otras palabras, la toma de decisiones de comportamiento y la planificación de la ruta de los vehículos autónomos se refieren a la planificación de un número determinado de rutas seguras alternativas basadas en la percepción ambiental y la información de salida del subsistema de navegación a través de algunas restricciones específicas, y la selección de una ruta óptima como el vehículo a conducir. El proceso de trayectoria.
Este artículo presentará en detalle el sistema de estructura técnica, los métodos técnicos, los algoritmos principales y los chips del módulo de planificación de la toma de decisiones de conducción autónoma.
Ξ 1. Sistema de estructura técnica
El sistema de estructura técnica común en el campo de la toma de decisiones y la planificación de la conducción autónoma se puede dividir en jerárquico, reactivo e híbrido.
1) Arquitectura jerárquica en capas
La jerarquía jerárquica puede entenderse como una estructura en serie, los distintos módulos del sistema de conducción autónoma están dispuestos en línea recta, y el contenido procesado por el módulo anterior entrará directamente en la siguiente etapa, como se muestra en la siguiente figura: 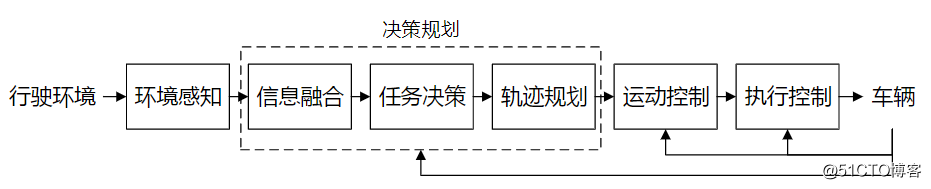
jerarquía jerárquica La ventaja del módulo es que el orden de cada módulo es claro y la estructura progresiva de cada módulo reduce gradualmente el alcance del trabajo manejado por cada módulo, y la precisión de los problemas de procesamiento aumenta gradualmente, lo que facilita lograr un control inteligente de alto nivel.
Sin embargo, existen algunos problemas con la estructura jerárquica. En primer lugar, la estructura jerárquica necesita llamar a la información del sensor en tiempo real, lo que tiene mayores requisitos para los sensores. Además, en el diseño jerárquico, desde la percepción ambiental hasta el control de ejecución, hay un cierto retraso en el medio, falta tiempo real y flexibilidad.
Finalmente, la estructura jerárquica de series tiene el problema de baja confiabilidad. En la física de la escuela secundaria, todos han estado expuestos al conocimiento de los circuitos en serie y en paralelo. En comparación con el modo paralelo, el mayor problema del modo serie es que ninguna parte del sistema general puede tener problemas; de lo contrario, el canal de transmisión del flujo de información y el flujo de control se verán afectados, y todo el sistema estará colapsando en cualquier momento.
2) Estructura del sistema reactivo
La mayor diferencia entre la arquitectura reactiva y la arquitectura jerárquica es que la arquitectura reactiva utiliza una estructura paralela, como se muestra en la siguiente figura: 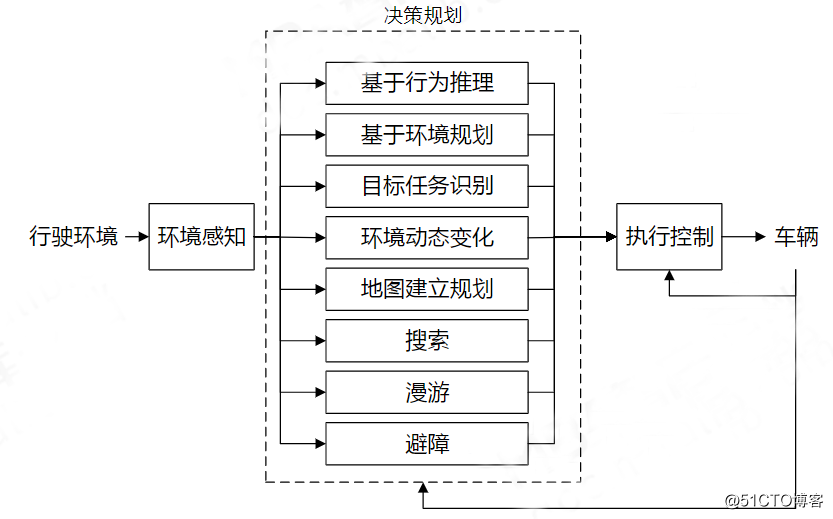
En la arquitectura reactiva, el contenido del módulo de planificación de decisiones se organiza en modo paralelo y el entorno es consciente. El contenido de se transmitirá simultáneamente a múltiples módulos de planificación de la toma de decisiones, que pueden resaltar las características de "percepción-acción" y adaptarse fácilmente a un entorno completamente desconocido.
En comparación con la estructura del sistema jerárquico, el sistema de estructura reactiva ocupa menos espacio de almacenamiento, tiene una respuesta rápida y un alto rendimiento en tiempo real. Al mismo tiempo, la estructura paralela mejora la estabilidad de la estructura general y la falla de un nivel de contenido en el módulo de planificación de la toma de decisiones no afectará el funcionamiento normal de otros niveles. Sin embargo, esto también aumenta la complejidad de la operación general del sistema y requiere el apoyo de niveles más altos de tecnología inteligente.
3) Arquitectura híbrida de los dos
Debido a la existencia de ciertos problemas tanto en la arquitectura jerárquica como en la reactiva, un solo sistema no puede satisfacer las necesidades reales de conducción automatizada para manejar escenarios complejos y cambiantes, por lo que la arquitectura híbrida ha recibido cada vez más atención. 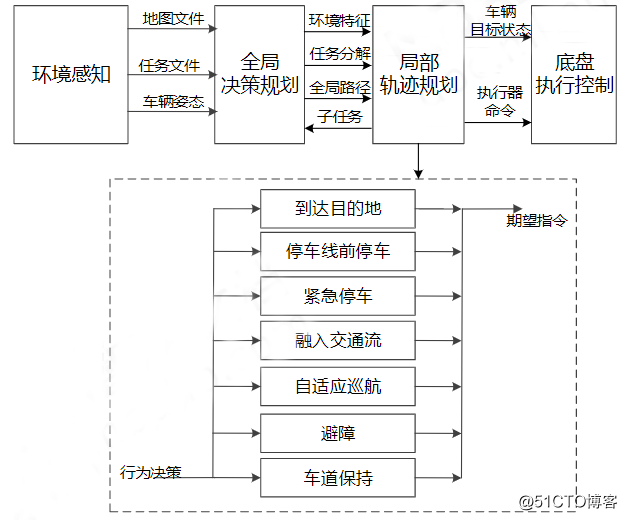
La arquitectura híbrida combina las ventajas de ambas: la planificación global y la planificación local son aplicables a diferentes arquitecturas, lo que hace que los vehículos autónomos sean más adaptables a las complejas y cambiantes condiciones reales de las carreteras.
Ξ 2. Método técnico
Según el grado de dominio de la información ambiental, la planificación de la ruta de conducción autónoma se puede dividir en planificación de ruta global y planificación de ruta local.
1) Planificación de ruta global
La planificación global de la ruta también se puede llamar planificación de tareas de conducción. El contenido principal es la planificación de la autonomía de la ruta de conducción.
La planificación de ruta global planificará una ruta ideal para vehículos autónomos en un entorno conocido La precisión de la planificación de ruta depende de la precisión de la información obtenida por el módulo de percepción del entorno. Esta es una especie de planificación previa, similar a la función de "navegación" que se usa comúnmente en nuestra vida diaria: ingrese el lugar de salida y el destino, y la aplicación planificará automáticamente una ruta óptima.
Cabe señalar que la planificación de rutas globales requiere información precisa sobre el medio ambiente por adelantado. Cuando el entorno cambia, es probable que los resultados de la planificación no sean válidos.
Actualmente, los algoritmos de planificación de rutas globales comúnmente utilizados incluyen los algoritmos Dijkstra y A *, así como versiones mejoradas de ambos.
El algoritmo Dijkstra (ruta más corta de fuente única) fue propuesto por el científico Edsger W. Dijkstra en 1956 y se utiliza principalmente para resolver el problema de encontrar la ruta más corta entre nodos en un gráfico. 
Proceso de operación del algoritmo de Dijkstra
La ventaja de este algoritmo es que la ruta dada es óptima, pero la desventaja también es obvia, es decir, la complejidad computacional es alta, porque está explorando el entorno y no hay una dirección clara.
El algoritmo A * fue publicado en 1968 por Peter Hart, Nils Nilsson y Bertram Raphael del Stanford Research Institute, y se considera una extensión del algoritmo de Dijkstra.
La esencia de este algoritmo es la búsqueda en amplitud, que puede encontrar el nodo de destino lo antes posible al agregar control condicional sobre la base de la búsqueda en amplitud. La fórmula se expresa como: f (n) = g (n) + h (n), f (n) es la función de evaluación desde el punto inicial a través del nodo de peso n hasta el punto objetivo, y g (n) es el valor desde el punto inicial en el espacio de estados El costo real de nodo a nodo n, h (n) es el costo estimado de la mejor ruta desde n hasta el nodo objetivo.
2) Planificación de rutas locales
La planificación de ruta local también se puede llamar planificación de ruta en tiempo real. En un entorno con obstáculos, los vehículos autónomos utilizarán sus propios sensores para percibir el entorno circundante en tiempo real, encontrar una ruta de conducción local óptima, evitar colisiones y mantener una distancia segura.
La ventaja de la planificación de ruta local es que puede retroalimentar y corregir los resultados de la planificación en tiempo real, asegurando que el vehículo autónomo siempre esté en la ruta de conducción óptima. La desventaja es la falta de información del entorno global y puede suceder que no se pueda encontrar la ruta correcta o la ruta completa.
En general, no existe una diferencia esencial entre la planificación de rutas globales y la planificación de rutas locales. Los dos trabajan juntos y los vehículos autónomos pueden planificar mejor el camino óptimo.
Ξ 3. Algoritmo y chip
Actualmente, existen principalmente tres tipos de algoritmos de decisión de comportamiento que se utilizan comúnmente en vehículos autónomos:
1) Basado en redes neuronales: El sistema de toma de decisiones de los vehículos autónomos utiliza principalmente redes neuronales para determinar escenarios específicos y tomar decisiones de comportamiento adecuadas.
2) Basado en reglas: los ingenieros proponen todas las combinaciones posibles de "reglas si-entonces" y luego usan rutas técnicas basadas en reglas para programar el sistema de toma de decisiones del automóvil.
3) Ruta híbrida: Combina los dos métodos de toma de decisiones anteriores, optimizados por una red neuronal centralizada y perfeccionados por "reglas si-entonces". La ruta híbrida es la ruta técnica más popular.
En el campo de los chips, hay dos tipos principales de chips de piloto automático de uso común, uno es la plataforma de computación para vehículos de la serie Mobileye® EyeQX ™ desarrollada por Intel-Mobileye y el otro es la plataforma de computación para vehículos de la serie NVIDIA Drive PX proporcionada por NVIDIA.
Mobileye se estableció en 1999 con el objetivo principal de desarrollar y promover sistemas de asistencia visual en el campo del transporte. Fue adquirido por Intel Corporation en 2017 y lo utilizó como el núcleo de su estrategia de investigación y desarrollo de tecnología de conducción autónoma.
Tomemos como ejemplo el último chip EyeQ5 de Mobileye. EyeQ5 tiene un rendimiento informático de 12 Tera / seg y puede admitir hasta 20 sensores externos (cámara, radar o lidar).
Además, EyeQ5 tiene un acelerador heterogéneo y totalmente programable. Los cuatro tipos de aceleradores integrados en el chip están optimizados algorítmicamente, lo que es más propicio para la realización de la "fusión de sensores". 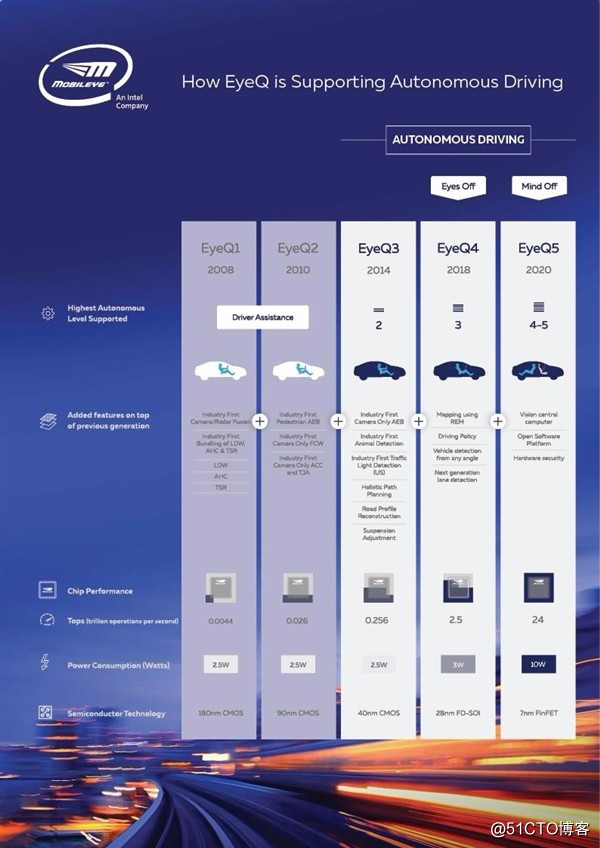
La plataforma NVIDIA DRIVE es una plataforma de inteligencia artificial lanzada por NVIDIA para la conducción autónoma. Combina aprendizaje profundo, fusión de sensores y tecnología de visión envolvente para cambiar la experiencia de conducción.
La plataforma NVIDIA DRIVE puede comprender los cambios en el entorno alrededor del vehículo en tiempo real, ubicarse con precisión en un mapa de alta definición y planificar una ruta segura por delante.
Actualmente, DRIVE PX2 es la última versión de este producto. Está fabricado en un proceso FinFET de 16nm, con un TDP de 250W, admite 12 entradas de cámara, posicionamiento láser, sensores de radar y ultrasónicos, y tiene una capacidad de computación de precisión simple de 8 TFlops.Actualmente es una plataforma de conducción autónoma avanzada.
Continuará...
Referencias para este artículo:
1. "Libro blanco de la serie de inteligencia artificial de China 2017: conducción inteligente" - Sociedad de inteligencia artificial de China
2. "Informe de investigación sobre conducción autónoma de inteligencia artificial 2018" -Aminer
3. "Decisión y control de vehículos autónomos" - Universidad de Tsinghua