
Con el avance de la inteligencia y la electrónica automotrices, la conducción autónoma se ha convertido en una de las tendencias principales en el desarrollo automotriz futuro.
Centrándose en la investigación de sistemas de tecnología clave para la conducción autónoma, la realización de pruebas de campo en carretera abierta y aplicaciones comerciales son el enfoque actual de la industria.
En pocas palabras, la realización de la conducción autónoma debe resolver tres problemas centrales: "¿Dónde estoy? ¿A dónde voy? ¿Cómo debo ir?" Una solución completa a estos tres problemas es la verdadera conducción autónoma.
En la actualidad, las tecnologías clave de los vehículos autónomos incluyen principalmente percepción ambiental, posicionamiento preciso, toma de decisiones y planificación, control y ejecución, mapas de alta precisión y redes de vehículos V2X, y tecnologías de prueba y verificación de vehículos autónomos.
Con el apoyo de este sistema técnico y equipos clave de software y hardware, los vehículos autónomos pueden percibir el entorno circundante a través de cámaras a bordo, lidar, radar de ondas milimétricas, sensores ultrasónicos y de otro tipo, y monitorear dinámicamente los cambios en el entorno circundante en tiempo real y en función de la información obtenida. Tomar decisiones y juzgar para formar un plan de ruta seguro y razonable. Una vez planificada la ruta, el sistema de ejecución del automóvil controlará el vehículo para completar la conducción a lo largo de la ruta planificada.
Este sistema de tecnología central para la conducción autónoma se puede resumir simplemente como "percepción, toma de decisiones y ejecución". 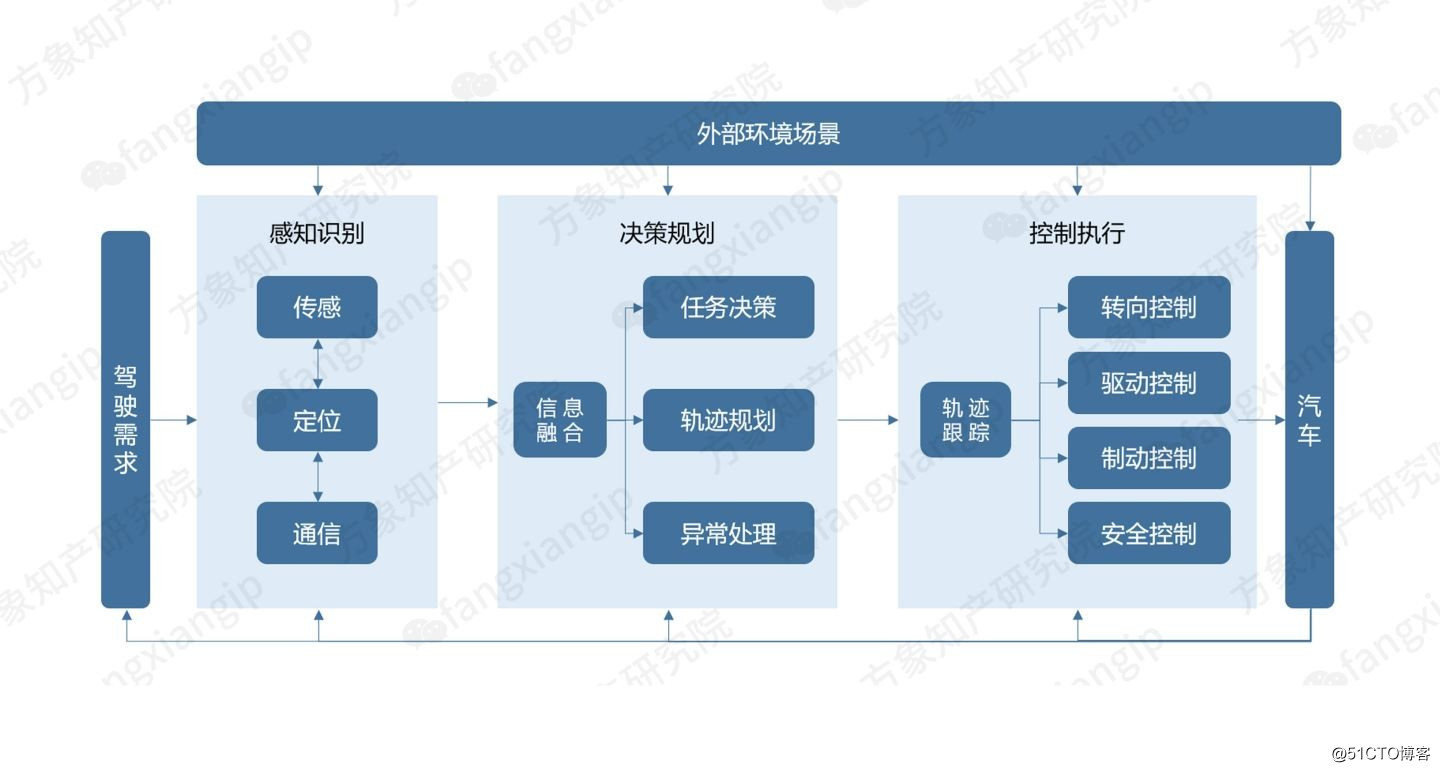
Percepción, toma de decisiones y ejecución (fuente de la imagen: Instituto de Investigación de Propiedad Intelectual de Fangxiang)
El sistema de percepción también se denomina "sistema de control de nivel medio", que es responsable de percibir el entorno circundante y recopilar y procesar información ambiental e información en el automóvil, que incluye principalmente el monitoreo de límites de carreteras, detección de vehículos, detección de peatones y otras tecnologías.
El sistema de toma de decisiones también se conoce como el "sistema de control de nivel superior", que es responsable de la planificación de la ruta y la navegación, y reemplaza a los humanos en la toma de decisiones de conducción mediante la ejecución de las estrategias de control correspondientes.
El sistema ejecutivo, también llamado "sistema de control inferior", que se encarga de la aceleración, el frenado y la dirección del automóvil, está compuesto principalmente por tres partes: frenado electrónico, conducción electrónica y dirección electrónica.
A través de la división y coordinación de los tres sistemas de "percepción, decisión y ejecución", la responsabilidad de controlar claramente el funcionamiento del automóvil puede hacer que el automóvil autónomo tenga las condiciones teóricas de "conducción automática". 
Varios hardware de uso común en vehículos autónomos (fuente de la imagen: consulte la referencia 1)
Este artículo presentará en detalle el sistema de tecnología central de la conducción autónoma desde las perspectivas de percepción, toma de decisiones y ejecución.
1. Percepción
Para realizar la conducción autónoma, primero se debe resolver un problema: la seguridad en la conducción.
Para garantizar que los vehículos autónomos puedan emitir juicios correctos en diferentes escenarios, es necesario lograr la adquisición y el reconocimiento dinámicos en tiempo real de la información del entorno circundante, que incluye, entre otros, el estado del vehículo, la información del flujo de tráfico, las condiciones de la carretera, las señales de tráfico, etc. Para satisfacer las necesidades del sistema de toma de decisiones del vehículo.
En otras palabras, la percepción ambiental juega un papel similar a los "ojos" y "oídos" de los conductores humanos, y es un requisito previo para la conducción automática.
Con el fin de satisfacer las necesidades de percepción ambiental, los automóviles autónomos suelen estar equipados con muchos sensores integrados, como cámaras, lidares, radares de ondas milimétricas y ultrasonidos. Con la cooperación de estos sensores y las tecnologías de red V2X y 5G, el entorno de tráfico del automóvil se puede obtener en tiempo real. La información de múltiples fuentes, como el estado del vehículo y el estado del vehículo, proporciona servicios de apoyo para la toma de decisiones y la planificación de vehículos autónomos.
En la actualidad, existen dos rutas técnicas para la tecnología de percepción ambiental: una es una solución de fusión multisensor dominada por cámaras, el representante típico es Tesla. La otra es una solución técnica liderada por lidar y asistida por otros sensores.Los representantes corporativos típicos son Google, Baidu, etc. 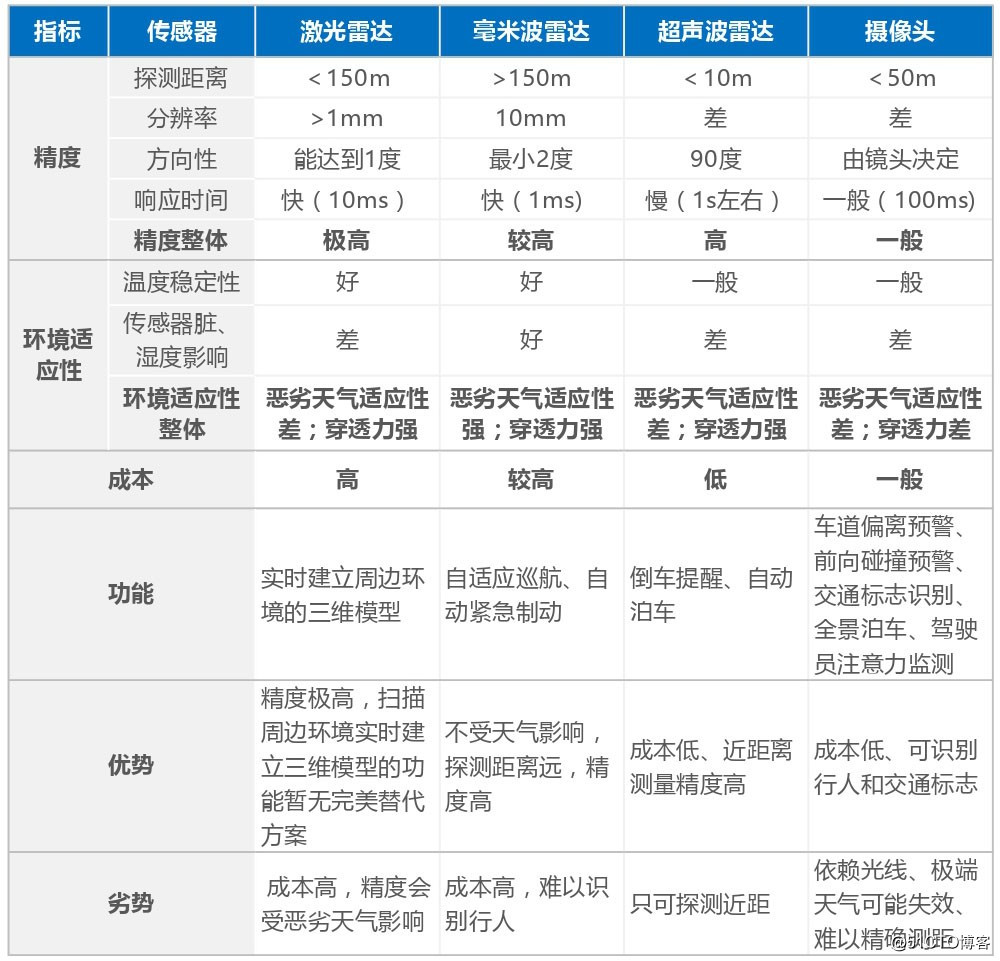
Características de los sensores de vehículos convencionales (fuente de la imagen: 36 氪)
Ξ 1. Cámara
Las cámaras montadas en vehículos son la base de muchas funciones ADAS de reconocimiento y alerta temprana, y actualmente son uno de los sensores montados en vehículos más baratos y más utilizados. 
Componentes de la cámara del piloto automático Baidu Apollo
La cámara puede identificar vehículos, peatones, líneas de carril, señales de tráfico, señales de tráfico, semáforos, etc. en el entorno de conducción del vehículo. Tiene una alta estabilidad de imagen, capacidad antiinterferente y capacidad de transmisión.
Como sensor montado en un vehículo relativamente común, la ventaja de la cámara es que puede distinguir colores y es más adecuada para la interpretación de escenas. Pero también tiene deficiencias obvias.
En primer lugar, la cámara carece de la dimensión de "profundidad", no tiene visión estéreo y no puede juzgar la distancia entre el objeto y la cámara; en segundo lugar, la cámara es más sensible a la luz, a la luz demasiado oscura o demasiado fuerte y el cambio rápido entre los dos lo afectará. La imagen tiene un impacto serio.
De acuerdo con las diferentes lentes y disposiciones, la cámara se puede dividir aproximadamente en cuatro tipos: cámara monocular, cámara binocular, cámara trinocular y cámara de visión envolvente.
Las cámaras monoculares se utilizan principalmente para evaluar el estado de la carretera en el proceso de conducción automática, pero las cámaras monoculares tienen una contradicción irreconciliable en el alcance y la distancia: cuanto más amplio es el ángulo de visión de la cámara, más corta es la distancia precisa que se puede detectar; Cuanto más estrecho sea el ángulo de visión, mayor será la distancia de detección.
Esto es similar al ojo humano: cuando se mira a distancia, el área de cobertura es estrecha, y cuando se mira a una distancia cercana, el área de cobertura es más amplia.
Para solucionar este problema, la solución de utilizar una lente de enfoque fijo para resolver observaciones a diferentes distancias, cámaras binoculares e incluso multioculares, se ha ido generalizando cada vez más.
La cámara binocular, como su nombre indica, tiene dos componentes de cámara. Cuando dos cámaras similares disparan un objeto, se obtendrá información como el desplazamiento de píxeles del objeto, la distancia focal de la cámara y la distancia real de las dos cámaras, y la distancia del objeto se puede calcular en función de la información.
Sin embargo, aunque el binocular puede obtener resultados de rango de alta precisión y proporcionar capacidades de segmentación de imagen, es lo mismo que una cámara monocular, el campo de visión de la lente depende completamente de la lente. Además, el principio de medición de la distancia binocular requiere más posiciones de instalación y distancias de las dos lentes, y existen ciertas dificultades en la calibración de la cámara.
En la actualidad, la más utilizada es una cámara trinocular, una combinación de tres cámaras monoculares con diferentes distancias focales. Tomemos como ejemplo el piloto automático de Tesla. La siguiente imagen muestra la cámara trinocular del piloto automático de Tesla instalada debajo del parabrisas: 
la cámara trinocular de Tesla AutoPilot
Tesla Autopilot tiene un total de 8 cámaras, 1 radar de onda milimétrica frontal y 12 configuraciones de sensor de radar ultrasónico. La cobertura general del campo de visión de la vista superior es la siguiente: 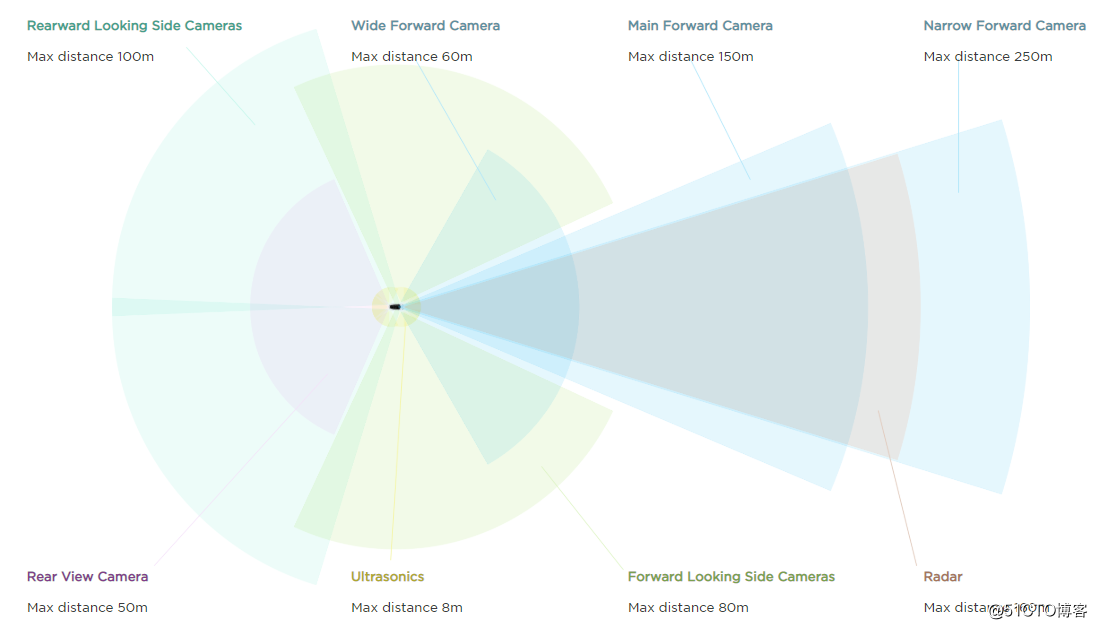
La configuración específica de la cámara trinocular es la siguiente:
FOV 35 grados, la distancia más lejana es 250 metros; FOV 50 grados, la distancia de detección más lejana es 150 metros; FOV 120 grados, la distancia de detección más lejana es 60 metros.
La combinación de cámaras trinoculares y otras cámaras de posición proporciona al piloto automático Tesla capacidades de percepción ambiental omnidireccional, lo que resuelve mejor los problemas de rango de percepción y precisión de percepción.
Además de las cámaras monoculares y multicámara, existe un tipo de cámara más común, es decir, cámaras de visión envolvente. A diferencia de las tres cámaras mencionadas anteriormente, la lente de la cámara de visión envolvente es una lente de ojo de pez y la posición de instalación es hacia el suelo.
La ventaja de la cámara de visión envolvente es que tiene un amplio campo de visión, pero la desventaja también es obvia, es decir, la imagen está muy distorsionada, por lo que se usa principalmente para la detección de obstáculos dentro de los 5-10 metros de la carrocería del vehículo y el reconocimiento de la línea de ubicación durante el estacionamiento autónomo.
Ξ 2. Lidar
Lidar es un dispositivo de medición activo que emite un rayo láser para detectar la ubicación de un objetivo en el espacio. En la escena de la conducción autónoma, lidar tiene dos funciones principales: percepción del entorno 3D y posicionamiento mejorado SLAM.
De acuerdo con el principio de detección, el lidar se puede dividir en lidar de una sola línea (bidimensional) y lidar de varias líneas (tridimensional).
El lidar de una sola línea escanea el área enviando una línea de escaneo láser y devuelve el valor medido de acuerdo con la distancia espacial relativa y la orientación de cada punto en el área del lidar. Los datos LIDAR de una sola línea carecen de dimensión y solo pueden describir información lineal, pero no pueden describir superficies. Sin embargo, el LIDAR de línea única es actualmente el LIDAR de menor costo.
Lidar multilínea, al emitir dos o más líneas de escaneo láser para escanear el área. El lidar multilínea puede detectar la distancia espacial y la orientación del objetivo, y puede describir el modelo de entorno tridimensional a través de la nube de puntos, puede proporcionar la información de intensidad de reflexión del láser del objetivo y proporcionar la descripción detallada de la forma del objetivo detectado.
En la actualidad, son 4 líneas, 8 líneas, 16 líneas, 32 líneas y 64 líneas que se han lanzado al mercado internacional. Cuantos más haces emite el lidar, más nubes de puntos se recopilan por segundo y mayor es el costo.
Tomemos a Velodyne, una empresa conocida en la industria lidar, por ejemplo. El precio actual de su HDL-64E es cercano a los US $ 100.000: 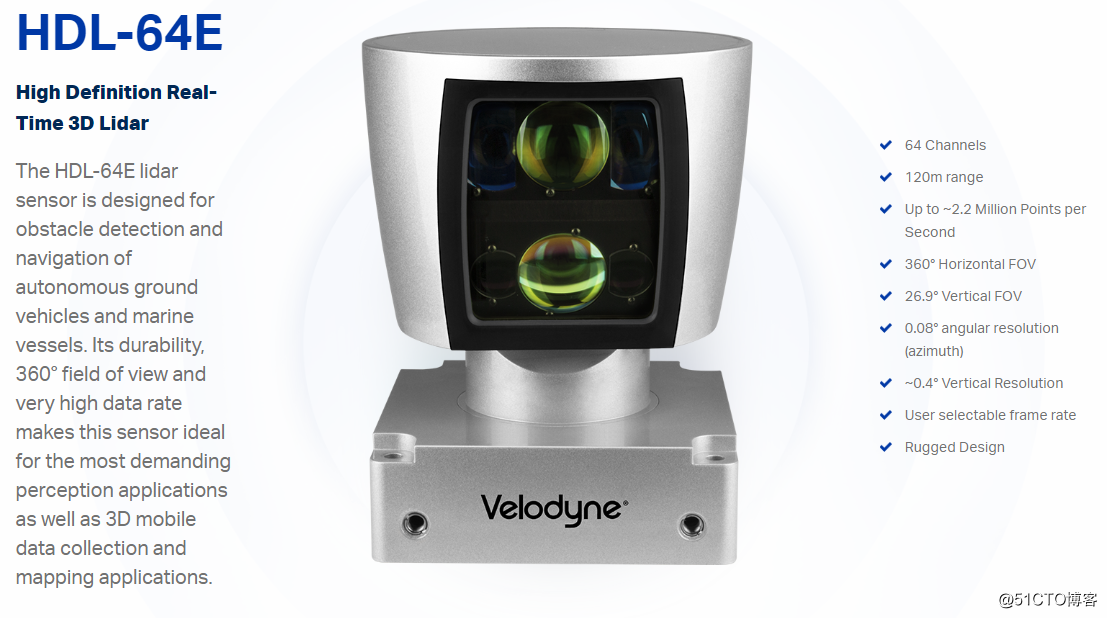
En la actualidad, lidar ha desarrollado tres generaciones de productos, incluida la primera generación de lidar de escaneo mecánico y la segunda generación. Lidar híbrido de estado sólido y lidar de estado sólido puro de tercera generación.
En general, el lidar es relativamente alto en términos de umbrales técnicos y costos de fabricación. La aplicación comercial de la conducción autónoma espera más productos similares de alta calidad y menor precio en el mercado.
Ξ 3. Radar de ondas milimétricas
Debido al alto precio del lidar, el precio de un solo radar puede superar con creces el precio del vehículo en sí, por lo que muchas empresas optan por utilizar radares de ondas milimétricas más rentables como sensores para medir el alcance y la velocidad.
El radar de ondas milimétricas se refiere a un radar que trabaja en la banda de ondas milimétricas con una frecuencia entre 30 y 300 GHz. En comparación con el lidar, el radar de ondas milimétricas no solo tiene un costo más bajo, sino que también puede resolver el problema de la precisión insuficiente del rango de la cámara y la medición de la velocidad. Además, el radar de ondas milimétricas también puede manejar perfectamente el clima de arena y polvo que el lidar no puede manejar.
Sin embargo, el radar de ondas milimétricas no está exento de defectos. En primer lugar, la estabilidad de los datos del radar de ondas milimétricas es deficiente, lo que plantea mayores requisitos para los algoritmos de software posteriores.
Además, el radar de ondas milimétricas es extremadamente sensible al metal, y las vallas publicitarias metálicas en la carretera se considerarán obstáculos en muchos escenarios, lo que provocará un frenado continuo. Finalmente, el radar de ondas milimétricas solo puede proporcionar información de distancia y ángulo, no información de altura como LIDAR. 
Componente de radar de ondas milimétricas autónomo Baidu Apollo
Según diferentes principios de medición, los radares de onda milimétrica se pueden dividir en radares de onda milimétrica en modo pulso y radares de onda milimétrica de onda continua modulada en frecuencia.
El principio básico del radar de ondas milimétricas pulsadas es similar al lidar. Su estructura de hardware es relativamente compleja y costosa. Rara vez se utiliza en vehículos autónomos. En la actualidad, la mayoría de los radares de ondas milimétricas montados en vehículos utilizan el modo de onda continua modulada en frecuencia.
El radar de onda milimétrica de onda continua modulada en frecuencia tiene una estructura simple, tamaño pequeño, bajo costo y fácil de lograr detección de corto alcance.
Ξ 4. Radar ultrasónico
El radar ultrasónico funciona en la banda de ondas mecánicas y la frecuencia de trabajo es superior a 20 kHz.
El principio de funcionamiento del radar ultrasónico es enviar ondas ultrasónicas a través de un dispositivo transmisor ultrasónico y medir la distancia a través de la diferencia de tiempo del receptor que recibe el eco. Hay tres frecuencias de funcionamiento de uso común: 40 kHz, 48 kHz y 58 kHz. En términos generales, cuanto mayor es la frecuencia, mayor es la sensibilidad, pero más pequeños son los ángulos de detección horizontal y vertical, por lo que generalmente se usa una sonda de 40 kHz.
El radar ultrasónico tiene las ventajas de alta frecuencia, longitud de onda corta, pequeño fenómeno de difracción, buena direccionalidad y la capacidad de convertirse en un rayo para la propagación direccional. También tiene las características de impermeable y a prueba de polvo, por lo que es muy adecuado para estacionar.
En circunstancias normales, el radar ultrasónico se instalará sobre el parachoques del automóvil, oculto en una determinada posición del parachoques, como se muestra en la siguiente figura: 
Hay dos radares ultrasónicos comunes. Uno es el radar de marcha atrás instalado en los parachoques delantero y trasero del automóvil para medir los obstáculos en la parte delantera y trasera del automóvil, llamado UPA; el otro es el radar ultrasónico instalado en el costado del automóvil para medir la distancia de los obstáculos laterales, llamado UPA Para APA. La diferencia entre UPA y APA también se refleja en el rango de detección y el área de detección.
Ξ 5. Posicionamiento preciso
La percepción del entorno de los vehículos autónomos también incluye el posicionamiento preciso del vehículo. No solo necesita obtener la relación de posición relativa entre el vehículo y el entorno externo, sino que también necesita determinar la posición absoluta y la orientación del vehículo a través de la percepción del estado de la carrocería.
En la actualidad, varios métodos de posicionamiento de precisión comunes en el campo de la conducción autónoma incluyen "sistema de navegación inercial", "codificador de velocidad de rueda y estimación de trayectoria", "sistema de navegación por satélite" y "sistema de navegación autónoma SLAM".
El sistema de navegación inercial es un sistema de cálculo de parámetros de navegación con giroscopio y acelerómetro como dispositivos sensibles. Mide los datos de aceleración lineal y velocidad angular de la portadora en movimiento, e integra estos datos a lo largo del tiempo para obtener la velocidad, posición y actitud.
Específicamente, el sistema de navegación inercial es una especie de método de navegación de cálculo. Es decir, desde la posición de un punto conocido, la posición del siguiente punto se puede calcular basándose en el ángulo de rumbo y la velocidad del portador medidos continuamente, de modo que la posición actual del cuerpo en movimiento se puede medir continuamente.
Tomemos como ejemplo el sistema de navegación inercial utilizado por la tecnología de conducción autónoma de Baidu Apollo, que utiliza un método de acoplamiento flexible y un filtro de error de Kalman.
El resultado de la solución de navegación inercial se utiliza para la actualización de tiempo del filtro de Kalman, es decir, la predicción; y los resultados de posicionamiento de nube de puntos y GNSS se utilizan para la actualización de la medición del filtro de Kalman. El filtro de Kalman generará los errores de posición, velocidad y actitud para corregir el módulo de navegación inercial, y los errores durante la IMU se utilizan para compensar los datos originales de la IMU.
El principio del codificador de velocidad de la rueda y la estimación de la pista es calcular la posición del automóvil autónomo a través del codificador de velocidad de la rueda. Los codificadores de velocidad de las ruedas se instalan principalmente en las ruedas delanteras de los automóviles para registrar el número total de revoluciones de las ruedas.
Al analizar el número de rotaciones de las ruedas izquierda y derecha en cada período de tiempo, se puede calcular la distancia que recorre el vehículo hacia adelante y el grado de deflexión izquierda y derecha. Sin embargo, debido a la desviación entre el número de revoluciones y la conversión de distancia en diferentes materiales del terreno, cuanto mayor es el tiempo, mayor es la desviación de medición, y este método de posicionamiento es más en forma de asistencia.
Los sistemas de navegación por satélite incluyen principalmente el sistema de navegación por satélite Beidou de China, el sistema de navegación por satélite GPS de los Estados Unidos y el sistema de navegación por satélite GLONASS de Rusia. Estos sistemas de navegación pueden proporcionar servicios de posicionamiento de alta precisión.
SLAM (localización instantánea y construcción de mapas), también conocido como CML (construcción y localización simultánea de mapas).
Actualmente existen dos métodos SLAM principales. El primero es SLAM basado en lidar, tomando como ejemplo Google Cars. El vehículo está equipado con GPS, la posición se juzga por GPS y el registro de coordenadas se realiza con la imagen de nube de puntos SLAM del radar láser y el mapa de alta precisión, y la postura de sí mismo se confirma después de la coincidencia.
El segundo tipo es SLAM basado en la visión, tomando como ejemplo a Mobileye. Mobileye propone un método de posicionamiento sin SLAM-REM. El vehículo obtiene datos de coordenadas tridimensionales simples mediante la recopilación de señales que incluyen señales luminosas y señales, y luego obtiene datos unidimensionales identificando visualmente información como líneas de carril. La imagen de la cámara se registra con el mapa REM para completar el posicionamiento.
Actualmente, SLAM se usa a menudo para la navegación autónoma, especialmente en áreas donde el GPS no tiene señal o es desconocido.
Ξ 6. Mapa de alta precisión
Un mapa de alta precisión es un mapa temático para la conducción autónoma. Se compone de tres tipos de información vectorial que contiene información semántica: modelo de carril, componentes de la carretera (Objeto), atributos de la carretera y capas de características para el posicionamiento de múltiples sensores.
El mapa de alta precisión tiene información precisa sobre la ubicación del vehículo e información rica en datos de elementos de la carretera, lo que puede generar una función similar a la memoria general y la cognición del cerebro humano para el espacio. Puede ayudar a los automóviles a predecir información compleja de la carretera, como pendiente, curvatura y rumbo. Evitar mejor los riesgos potenciales es una de las tecnologías centrales de los vehículos autónomos.
En comparación con los mapas tradicionales de los sistemas de navegación GPS, la característica más importante de los mapas de alta precisión es su precisión para caracterizar las características de la carretera. En cuanto a los detalles del mapa de alta precisión, lo presentaremos en detalle en un artículo posterior.
Continuará...
Materiales de referencia:
- Desarrollo de un sistema de control de dirección para vehículos autónomos utilizando un algoritmo de seguimiento de ruta basado en geometría
2.AMiner "Informe de investigación sobre conducción autónoma de inteligencia artificial 2018"
3. [Percepción] Conjunto de sensor de piloto automático
( https://blog.csdn.net/yuxuan20062007/article/details/83862525 )
4.Sitio web oficial de Apolo
5.Velodyne 官 网
6.36Kr "Informe de investigación de la industria de conducción autónoma"