State Machine - Overlapping Sequence Detection
`timescale 1ns/1ns
module sequence_test2(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
//*************code***********//
parameter S0=0, S1=1, S2=2, S3=3, S4=4;
reg [2:0] state, nstate;
always@(posedge clk or negedge rst) begin
if(~rst)
state <= S0;
else
state <= nstate;
end
always@(*) begin
if(~rst)
nstate <= S0;
else
case(state)
S0 : nstate <= data? S1: S0;
S1 : nstate <= data? S1: S2;
S2 : nstate <= data? S3: S0;
S3 : nstate <= data? S4: S2;
S4 : nstate <= data? S1: S2;
default: nstate <= S0;
endcase
end
always@(posedge clk or negedge rst) begin
if(~rst)
flag <= 0;
else
flag <= state==S4;
end
//*************code***********//
endmodule
State machine - non-overlapping sequence detection
Only detect a sequence once. This is the real thing. You don’t need to consider other things. Just match. Don’t worry about mismatching.
`timescale 1ns/1ns
module sequence_test1(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
parameter idle=0,s1=1,s2=2,s3=3,s4=4,s5=5;
reg[2:0]cs;
reg[2:0]ns;
always@(posedge clk,negedge rst)begin
if(!rst)begin
cs<=idle;
end
else begin
cs<=ns;
end
end
always@(*)begin
case(cs)
idle:ns=(data==1)?s1:idle;
s1:ns=(data==0)?s2:idle;
s2:ns=(data==1)?s3:idle;
s3:ns=(data==1)?s4:idle;
s4:ns=(data==1)?s5:idle;
default:ns=idle;
endcase
end
always@(posedge clk,negedge rst)begin
if(!rst)begin
flag<=0;
end
else begin
flag<=ns==s5;
end
end
endmoduleNon-overlapping sequence detection
state machine
It is more convenient to use a state machine. For sequence detection, the method is selected according to the characteristics. The simplest is the MOORE type. It depends on whether it is slow or not. Change CS and NS directly during the output judgment. If you want it to be slower, use CS. If not, use CS. Just NS
The MOORE and MEALY types of nS are the same synchronization
If there is no overlap, it will directly return to the initial state when there is no match, and there is no need for Kmp matching.
Shift Register
On the basis of the shift register, a CNT limit is added'
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
output reg match,
output reg not_match
);
reg[2:0]cnt;
reg[5:0]ram;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
cnt<=0;
else
cnt<=cnt==5?0:cnt+1;
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
ram<=0;
else
ram<={ram[4:0],data};
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
not_match<=0;
end
else begin
match<=(cnt==5)&&({ram[4:0],data}==6'b011100);
not_match<=(cnt==5)&&({ram[4:0],data}!=6'b011100);
end
end
endmoduleSequence detection with extraneous items
Shift Register
Use two signals to determine whether the left and right sides meet the requirements. If both are met, output 1
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output match
);
reg[8:0]temp;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
temp<=9'b0;
end
else begin
temp<={temp[7:0],a};
end
end
reg ma;
reg mb;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
ma<='b0;
end
else begin
if(temp[8:6]==3'b011)
ma<=1'b1;
else
ma<=1'b0;
end
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
mb<='b0;
end
else begin
if(temp[2:0]==3'b110)
mb<=1'b1;
else
mb<=1'b0;
end
end
assign match=ma&mb;
endmoduleSequence detection for continuous input sequence
Shift Register
This shift register directly determines what is stored in the register, that is, the current state of the register, so it is a MOORE state machine.
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output reg match
);
reg[7:0]atemp;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
atemp<=8'b0;
end
else
atemp<={atemp[6:0],a};
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match=1'b0;
end
else begin
if(atemp==8'b0111_0001)
match=1'b1;
else
match='b0;
end
end
endmodulestate machine
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output reg match
);
parameter idle=0,s1=1,s2=2,s3=3,s4=4,s5=5,s6=6,s7=7,s8=8;
reg[3:0]cs;
reg[3:0]ns;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
cs<=idle;
else
cs<=ns;
end
always@(*)begin
case(cs)
idle:begin
ns=(a==0)?s1:idle;
end
s1:begin
ns=(a==1)?s2:s1;
end
s2:begin
ns=(a==1)?s3:s1;
end
s3:begin
ns=(a==1)?s4:s1;
end
s4:begin
ns=(a==0)?s5:idle;
end
s5:begin
ns=(a==0)?s6:s2;
end
s6:begin
ns=(a==0)?s7:s2;
end
s7:begin
ns=(a==1)?s8:s1;
end
s8:begin
ns=(a==1)?s3:s1;
end
default:ns=idle;
endcase
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
match<=0;
else
match<=(cs==s8)?1:0;
end
endmoduleWhat the MOORE machine judges is the current state, so take a slow shot.
When the MOORE machine determines the next state, it is output synchronously like the MEALY machine.
Sequence detection for input sequence discontinuities
Shift register (output in the same cycle, MEALY type)
In the output judgment, it is determined by the current state and the input signal.
It is to shift when it is valid, and then also note that since the signal is to be output in the same beat, since the shift is updated in the next bit, the ram updated in this cycle will be carried out in the next cycle. Judgment, so it will lead to delay, so the output judgment must be combined with the current status, that is, MEALY type
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
input data_valid,
output reg match
);
reg[3:0]ram;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
ram=4'b0;
end
else if(data_valid)begin
ram<={ram[2:0],data};
end
else begin
ram<=ram;
end
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
end
else begin
match<=(ram[2:0]==3'b011)&&data&&data_valid;
end
end
endmoduleState machine (MOORE type)
The MOORE type is only related to the current state, so when outputting judgment, ns== is used, that is, what the secondary state is equal to.
And if it is MEALY, it is the current state plus input
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
input data_valid,
output reg match
);
parameter idle=0,s0=1,s1=2,s2=3,s3=4;
reg[2:0]cs;
reg[2:0]ns;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
cs<=idle;
end
else begin
cs<=ns;
end
end
always@(*)begin
case(cs)
idle:begin
if(data_valid)
ns=(data==1)?idle:s0;
else
ns=idle;
end
s0:begin
if(data_valid)
ns=(data==1)?s1:s0;
else
ns=s0;
end
s1:begin
if(data_valid)
ns=(data==1)?s2:s0;
else
ns=s1;
end
s2:begin
if(data_valid)
ns=(data==0)?s3:idle;
else
ns=s2;
end
s3:begin
if(data_valid)
ns=(data==0)?s0:idle;
end
endcase
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
end
else begin
match<=(ns==s3)?1:0;
end
end
endmodulestate machine
It should be noted that the MOORE machine that determines the next state is less than one beat, and the one that actually judges the current state is full of one beat.
The Moore machine has one more state than the Mealy machine. This state represents the initial state.
The output of the Moore machine is determined by the current state, and the output of the Mealy machine is determined by the current state and the input signal.
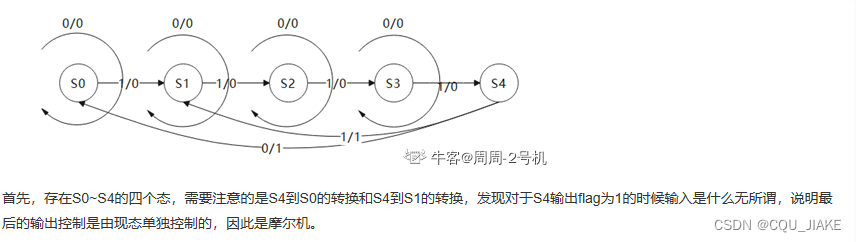
The final output control is controlled solely by the current state, so it is a Moore machine.
Blue represents the output. The Moore machine finally added state S4. From the state transition point of view, the output beat will be one beat later, but because it is a combinational logic output, it is not actually one beat later.
(This means that the MOORE machine and the MEALY machine that judge the next state have the same output, that is, they output in the same cycle, and only the MOORE machine that really judges the current state will be one cycle slower)
The difference between Moore machine and Miller machine : The main difference lies in whether the output of the state machine is related to the current state . The following is a two-stage expression to describe the difference between the two.
It should be noted that if the three-stage description method is used, the difference between the two mainly focuses on whether the judgment in the third stage is based on the current state or the secondary state.
The Moore state machine has one less state than the Miller state machine, and the Moore state machine is one cycle slower; the Miller state machine uses the current input and the current state to jointly judge, while the Moore state machine does not require the current input.
If it is a Moore machine, then in the output, it can only be judged as a secondary state, that is, what the secondary state is;
If you want a meal machine, in the output, it must be judged to be the combination of the current state and the input signal.
This is a Mealy machine, because when outputting, the output signal is controlled by the current state and the input together.
two-stage
The so-called two-stage formula is actually a way of writing specifically for the MOORE machine, because the output of the MOORE machine only depends on the current state, and then it is just a matter of judging the current state, and then judging what the next state is. The output will be one cycle later, and the second-stage The formula is to omit the last section of output and incorporate it into the state transition.
Because it is a MOORE machine, the secondary state is determined in the output. It is better to directly determine the output in the state transition when the secondary state is determined.
three-stage
From the next state to the present state, use posedge,
During state transition, use always@(*)
When exporting, also use posedge
In the first and second processes, since they are all synchronous timing, <= is used in both processes, and = is used in the second process.
`timescale 1ns/1ns
module fsm1(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
parameter S0 = 'd0, S1 = 'd1, S2 = 'd2, S3 = 'd3 ;
reg [2:0] current_state;
reg [2:0] next_state;
always@(posedge clk or negedge rst)begin
if(rst == 1'b0)begin
current_state <= S0;
end
else begin
current_state <= next_state;
end
end
always@(*)begin
case(current_state)
S0:begin
next_state = data ? S1 : S0;
end
S1:begin
next_state = data ? S2 : S1;
end
S2:begin
next_state = data ? S3 : S2;
end
S3:begin
next_state = data ? S0 : S3;
end
default:begin next_state = S0; end
endcase
end
always@(posedge clk or negedge rst)begin
if(rst == 1'b0)begin
flag <= 1'b0;
end
else begin
if(current_state == S3)begin
if (data) flag <= 1'b1;
else flag <= 1'b0;
end
else begin
flag <= 1'b0;
end
end
end
endmoduleThis is a meal machine,