1 引言
系统微分方程的解即为系统的输出响应,通过方程解的表达式,可以分析系统的动态特性。
若绘出输出响应曲线,便能直观地反映系统的动态过程,但其求解过程是十分繁杂的。
对于线性定常系统,传递函数是常用的一种数学模型,是在拉氏变换基础上建立的。
用传递函数描述系统可以免去求解微分方程的麻烦,间接地分析系统结构及参数与系统性能的关系。
并且可以根据传递函数在复平面上的形状直接判断系统的动态性能,找出改善系统品质的方法。
2 传递函数
2.1 概念及定义

在零初始条件下,线性定常系统输出量的拉氏变换与引起该输出的输入量的拉氏变换之比。
零初始条件:
1. t<0时,输入量及其各阶导数均为0。
2. 输入量施加于系统之前,系统处于稳定的工作状态,即t<0 时,输出量及其各阶导数也均为0。
设线性定常系统的微分方程为:

零初始条件下拉氏变换,得
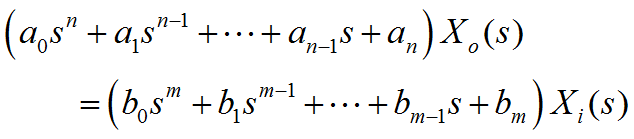
则系统传递函数为

具有以下特点:
1. 比微分方程简单,通过拉氏变换,实数域复杂的微积分运算已经转化为简单的代数运算。
2. 输入典型信号时,其输出与传递函数有一定对应关系,当输入是单位脉冲函数时,输入的象函数为1,其输出象函数与传递函数相同。
3. 令传递函数中的s=jω,则系统可在频率域内分析。
4. G(s)的零极点分布决定系统动态特性。
等效弹性刚度:

等效复阻抗:

2.2 传递函数实例
2.2.1 质量-弹簧-阻尼系统传递函数
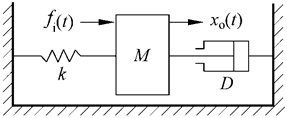

所有初始条件均为零时,其拉氏变换为:
![]()
按照定义,系统传递函数为:
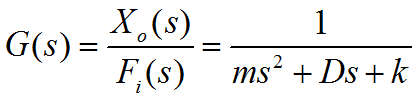
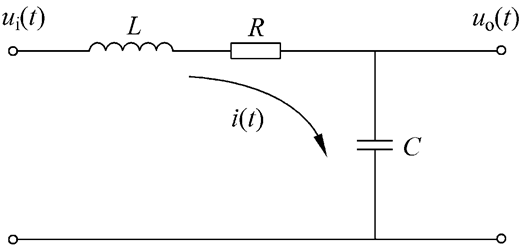
2.2.2 R-L-C无源电路网络传递函数
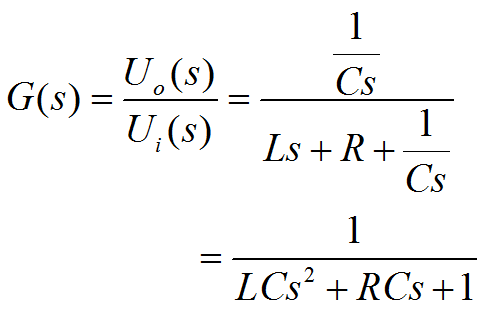
2.3 几点结论
1. 传递函数是复数s域中的系统数学模型,其参数仅取决于系统本身的结构及参数,与系统的输入形式无关。
2. 若输入给定,则系统输出特性完全由传递函数G(s) 决定,即传递函数表征了系统内在的固有动态特性。
3. 传递函数通过系统输入量与输出量之间的关系来描述系统的固有特性,即以系统外部的输入—输出特性来描述系统的内部特性。
2.4 传递函数的一般形式
线性定常系统:
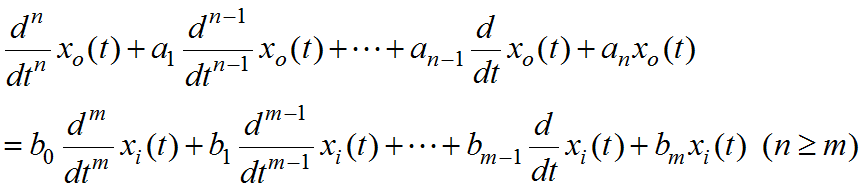
当初始条件全为零时,对上式进行拉氏变换可得系统传递函数的一般形式:

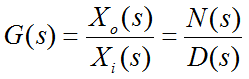
2.4.1 特征方程、零点和极点
令:
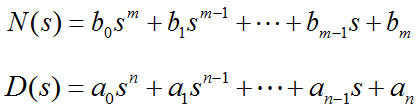
则:
D(s)=0称为系统的特征方程,其根称为系统的特征根。
特征方程决定着系统的动态特性,D(s)中s的最高阶次等于系统的阶次。
当s=0时,有
![]()
式中,K称为系统的静态放大系数或静态增益。
从微分方程的角度看,此时相当于所有的导数项都为零。因此K反应了系统处于静态时,输出与输入的比值。
2.4.2 零点和极点
将G(s)写成下面的形式:

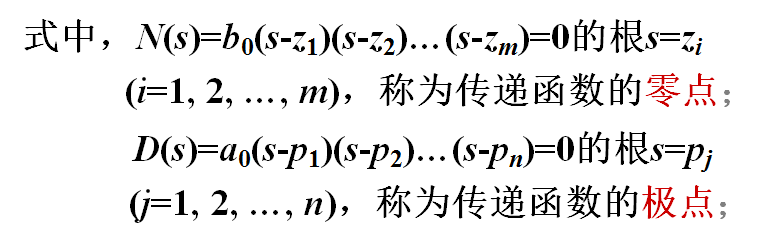
系统传递函数的极点就是系统的特征根,零点和极点的数值完全取决于系统的结构参数。
2.4.3 零、极点分布图
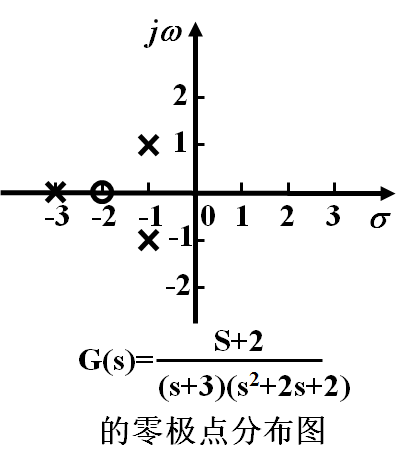
将传递函数的零、极点表示在复平面上的图形称为传递函数的零、极点分布图。图中,零点用“O”表示,极点用“×”表示。
2.4.4 传递函数的几点说明
1. 传递函数是一种以系统参数表示的线性定常系统输入量与输出量之间的关系式,传递函数的概念通常只适用于线性定常系统。
2. 传递函数是s的复变函数,传递函数中的各项系数和相应微分方程中的各项系数对应相等,完全取决于系统结构参数。
3.传递函数是在零初始条件下定义的,即在零时刻之前,系统对所给定的平衡工作点处于相对静止状态。因此,传递函数不反映系统在非零初始条件下的全部运动规律。
4. 传递函数只能表示系统输入与输出的关系,无法描述系统内部中间变量的变化情况。
5. 一个传递函数只能表示一个输入对一个输出的关系,适合于单输入单输出系统的描述,对于多输入多输出将采用传递函数阵。
2.4.5 脉冲响应函数
初始条件为0时,系统在单位脉冲输入作用下的输出响应的拉氏变换为
![]()
拉氏反变换为
![]()
g(t)称为系统的脉冲响应函数(权函数)。
系统的脉冲响应函数与传递函数包含关于系统动态特性的相同信息。
注意到复数域相乘等同于时域内卷积,因此,由
![]()
知线性系统在任意输入作用下,其时域输出
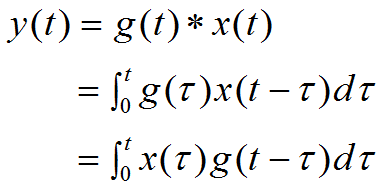
式中,当t<0时,g(t) = x(t) = 0。
3 典型环节及其传递函数
3.1 环节
具有某种确定信息传递关系的元件、元件组或元件的一部分称为一个环节,经常遇到的环节称为典型环节。
任何复杂的系统总可归结为由一些典型环节所组成。
3.2 环节的分类
假设系统有b个实零点,c对复零点,d个非零实极点,e对复极点和v个等于零的极点。
线性系统传递函数的零、极点表达式为

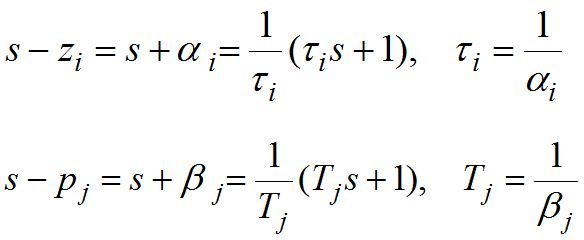
1. 对于实零点zi=-αi和实极点pj=-βj ,其因式可以变换成如下形式:
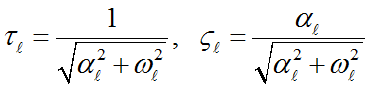
2. 对于复零点对zℓ=-αℓ+jωℓ和zℓ+1=-αℓ -jωℓ,其因式可以变换成如下形式:
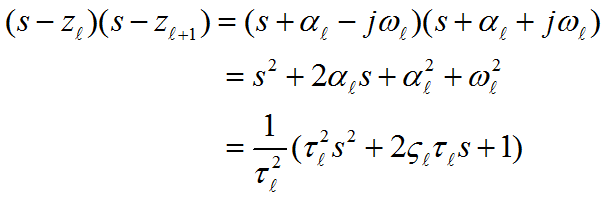
式中,
3. 对于复极点对pk=-αk+jωk和pk+1=-αk -jωk ,其因式可以变换成如下形式:
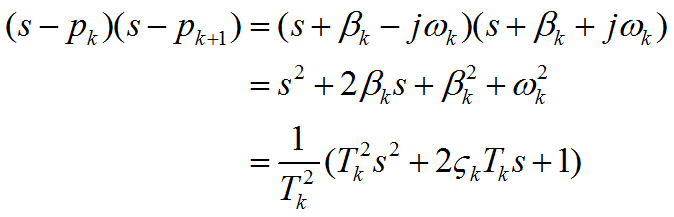
式中,
![]()
于是,传递函数可以写成:
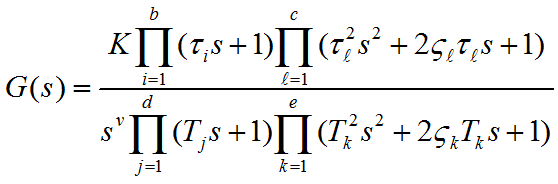
式中,
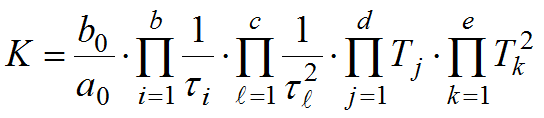
为系统静态放大倍数。
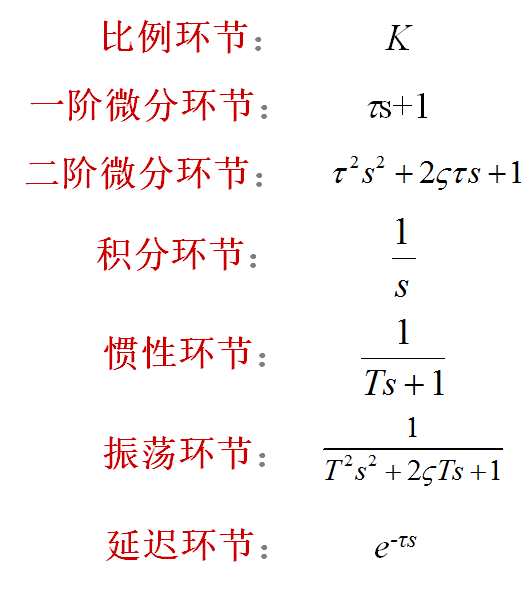
由上式可见,传递函数表达式包含六种不同的因子:
![]()
一般,任何线性系统都可以看作是由上述六种因子表示的典型环节的串联组合。上述六种典型环节分别称为:
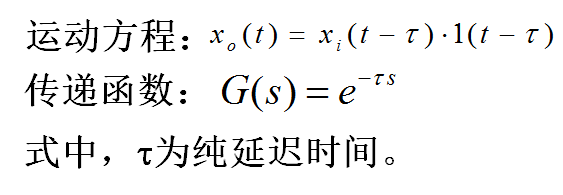
注:实际系统中存在纯时间延迟现象,输出完全复现输入,但延迟了时间τ,即:
![]()
此时
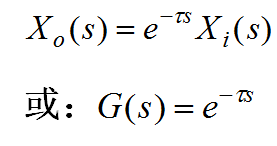
此即上面最后一种环节。
3.3 典型环节示例
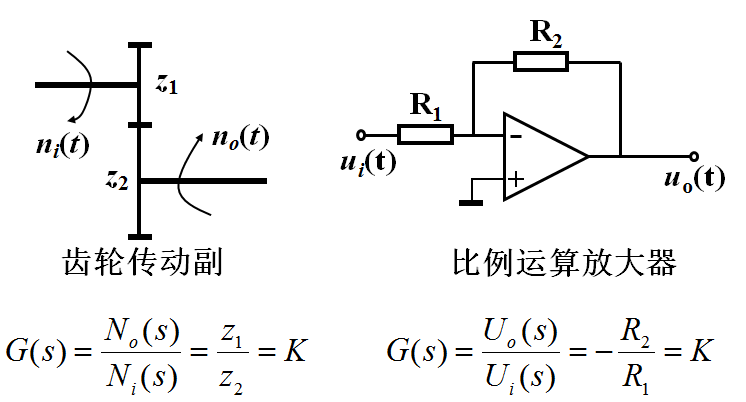
3.3.1 比例环节
输出量不失真、无惯性地跟随输入量,两者成比例关系。
![]()

比例环节传递函数:
![]()
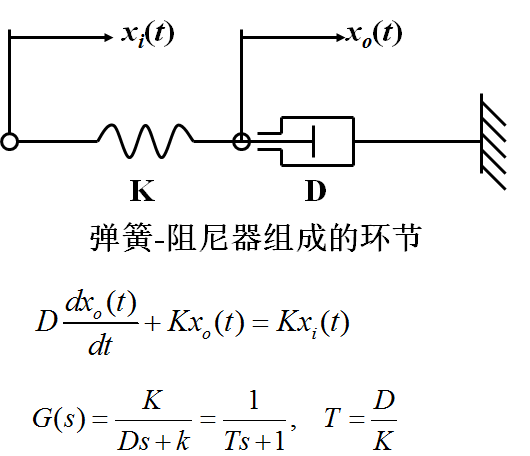
3.3.2 一阶惯性环节
凡是运动方程为下面一阶微分方程:
![]()
形式的环节称为一阶惯性环节,其传递函数为:
![]()
如:弹簧-阻尼器环节
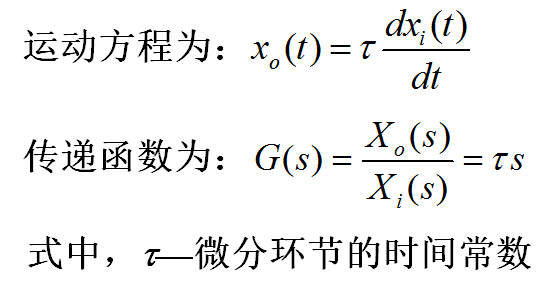
3.3.3 微分环节
输出量正比于输入量的微分。
无源微分网络:
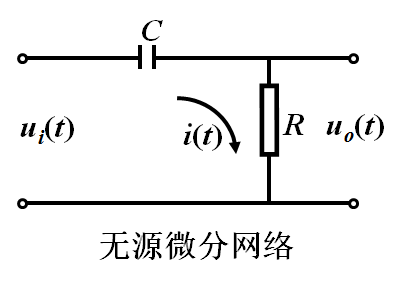
显然,无源微分网络包括有惯性环节和微分环节,称之为惯性微分环节。
只有当|Ts|<<1时,才近似为微分环节。
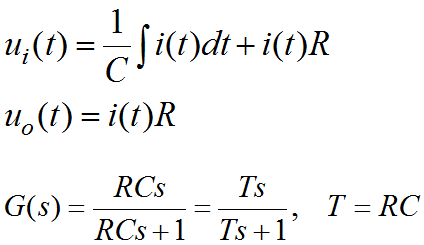
传递函数为:
时,称为一阶微分环节。
微分环节的输出是输入的导数,即输出反映了输入信号的变化趋势,从而给系统以有关输入变化形势的预告。
因此,微分环节常用来改善控制系统的动态性能。
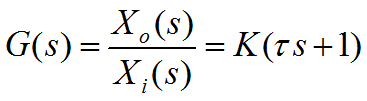
3.3.4 积分环节
输出量正比于输入量对时间的积分。
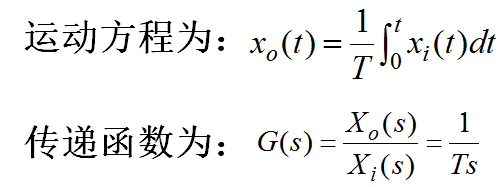
1. 输出量取决于输入量对时间的积累过程。
2. 具有明显的滞后作用:
如当输入量为常值A时,由于
![]()
输出量必须经过时间T才能达到输入量在t=0时的值A。
因此,积分环节常用来改善系统的稳态精度。
如,有源积分网络:
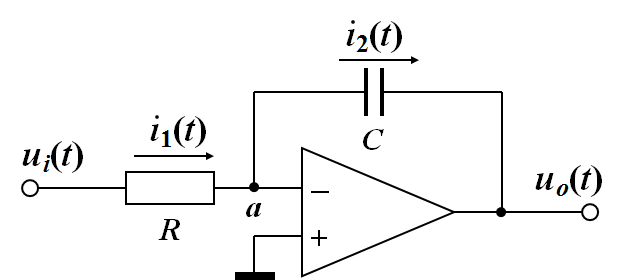
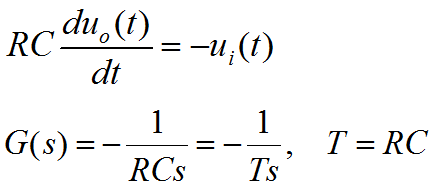
3.3.5 二阶振荡环节
含有两个独立的储能元件,且存储的能量能够相互转换,从而导致输出带有振荡的性质,运动方程为:

传递函数为:
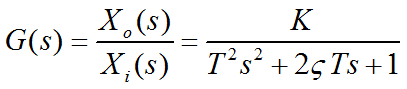
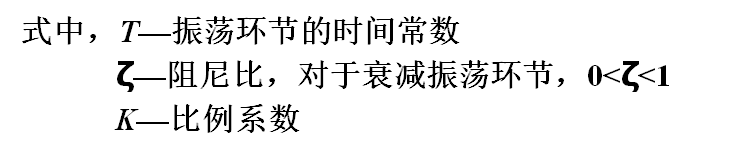
二阶振荡环节传递函数的另一常用标准形式为(K=1):
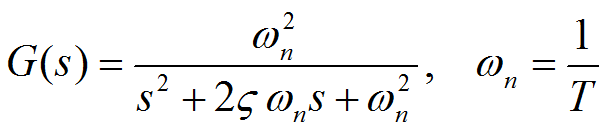
ωn称为无阻尼固有角频率。
如质量-弹簧-阻尼系统:

![]()
传递函数:
![]()
![]()
![]()
3.3.6 延迟环节
延迟环节与惯性环节的区别:
1. 惯性环节从输入开始时刻起就已有输出,仅由于惯性,输出要滞后一段时间才接近要求的输出值。
2. 延迟环节从输入开始之初,在0~τ时间内,没有输出,但t=τ之后,输出等于τ之前时刻的输入。
3.4 小结
