目前主流的目标检测算法主要是基于深度学习模型,其可以分成两大类:two-stage检测算法;one-stage检测算法。本文主要介绍第二类检测算法。
目标检测模型的主要性能指标是检测准确度和速度,对于准确度,目标检测要考虑物体的定位准确性,而不单单是分类准确度。一般情况下,two-stage算法在准确度上有优势,而one-stage算法在速度上有优势。不过,随着研究的发展,两类算法都在两个方面做改进。
one-stage检测算法,其不需要region proposal阶段,直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,因此有着更快的检测速度,比较典型的算法如YOLO,SSD,Retina-Net。
1、YOLO(15)
YOLO直接在输出层回归bounding box的位置和bounding box所属的类别(整张图作为网络的输入,把 Object Detection 的问题转化成一个 Regression 问题)。直接通过整张图片的所有像素得到bounding box的坐标、box中包含物体的置信度和class probabilities。通过YOLO,每张图像只需要看一眼就能得出图像中都有哪些物体和这些物体的位置。

网络设计:
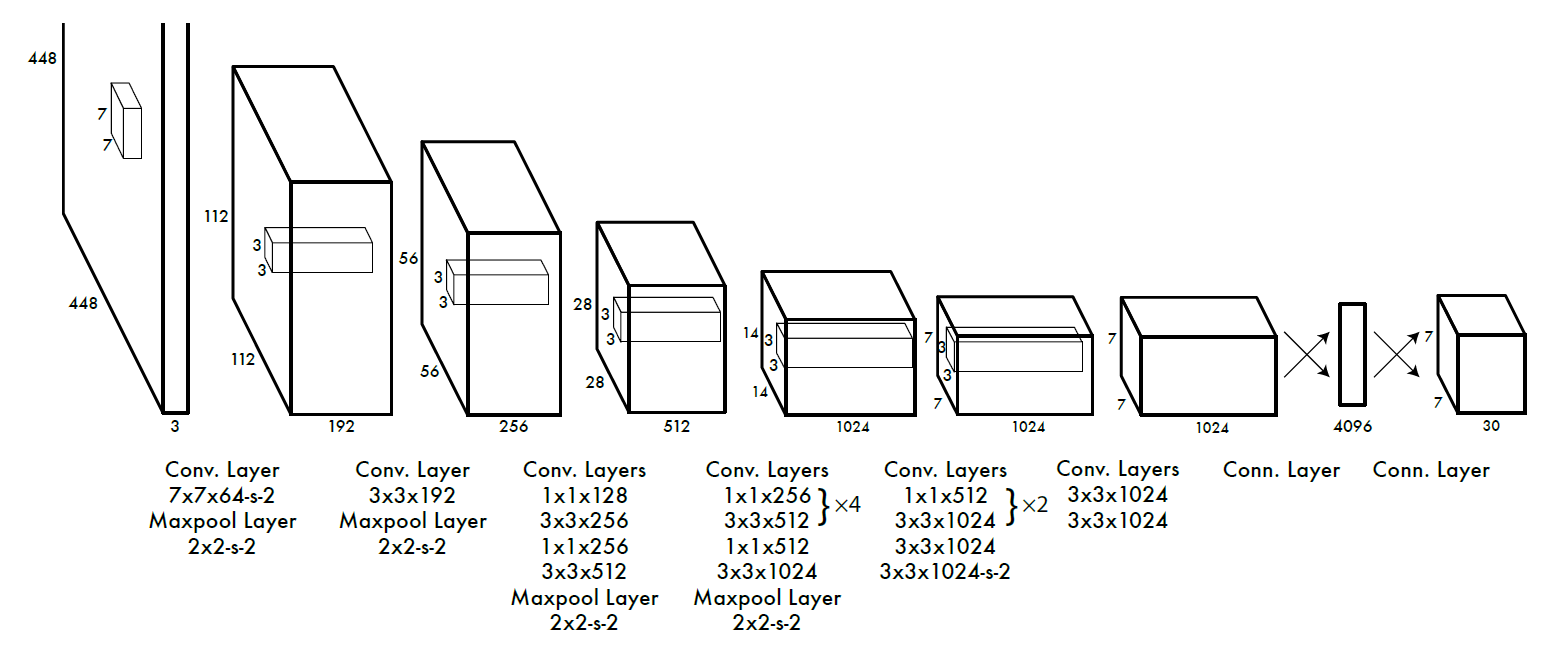
网络结构借鉴了 GoogLeNet 。24个卷积层,2个全链接层。(用1×1 reduction layers 紧跟 3×3 convolutional layers 取代Goolenet的 inception modules )。
(1)YOLO将输入图像划分为S*S的网格,某个物体落在这个网格中,该网格就负责预测这个物体,并且每个网格只预测一种object;
(2)每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息。每一个bounding box包含5个值:x,y,w,h和confidence。公式如下,其中如果有object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值。

(3)每一个网格还要预测 C 个 conditional class probability(条件类别概率):Pr(Classi|Object),记为C类,当类别数为20时,一个网格的输出30个信息。则SxS个网格,每个网格要预测B个bounding box还要预测C个categories。输出就是S x S x (5*B+C)的一个张量。注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的。
(4)测试时,每个网格预测的class信息和bounding box预测的confidence信息得到每个bbox的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
2、YOLO-v2(16)
1、通过一系列的方法提升准确率。
(1)Batch Normalization:对所有的conv层采用BN能够让网络更好的收敛,同时可以替代掉一些其他形式的regularization,而且可以去掉防止overfitting的dropout层而不会出现过拟合。
(2)High resolution classifier:YOLO从224*224增加到了448*448,这就意味着网络需要适应新的输入分辨率,使用448*448图片对网络微调。
(3) Convolutional With Anchor Boxes:预测偏移(offsets) 而不是直接预测坐标(coordinates) 能够简化问题,让网络更加容易学习,所以去除全连接层,利用Anchor Boxes预测BB。
在设置anchor 的比例时,相比于直接手工的设计比例,先用k-means聚类对原训练集进行聚类后再设置比例,能够获得更好的IOU,因为这相当于增加了一些先验信息。而获得更好的IOU,则有助于网络的训练。而在k-means选择现在度量距离的时候,并不是直接选择欧氏距离,而是选择 d(box, centroid) = 1 – IOU(box, centoid), 因为我们关心的是IOU,这无关于box的大小,而欧氏距离会受box大小的影响。最终选择k =5.
(4)Direct location prediction:约束位置预测,相对于网格左上角点的位置偏移。
(5)Fine-Grained Features:跨层连接,YOLO则还是采用13x13 的feature map上,但另外增加了一个passthrough layer 将一个earlier layer at 26x26 resolution 连接到 最末端的13x13的 feature map上。具体是,类似于ResNet的 identitymappings,将 26x26x512的feature map 转换成 13x13x2048的feature map. 最终提高1%的性能。
(6)Multi-Scale Training:网络是一个权值共享的网络,但是输入的图片大小可以是{320, 352, …, 608} ,训练时每10个batches 随机选取一种size。这样使得模型不需要固定一种输入尺寸,选取小尺寸时,可以获得更快的速度,大尺寸可以获得更高的精度。十分灵活。
2、提升速度
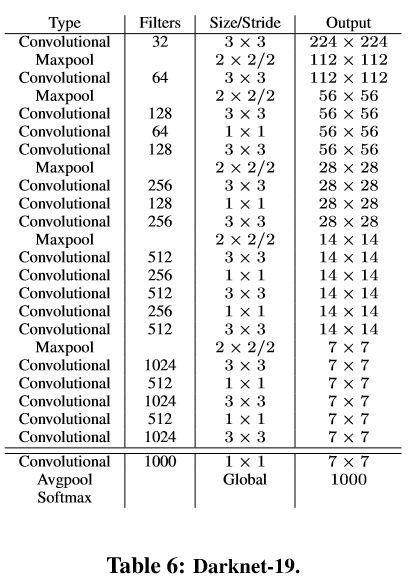
(1)model–Darknet19,有19个卷积层和5个maxpooling层,基本采用3x3 filter 和 每次pooling后通道数加倍的方法;
(2)采用data augmentation,随机裁剪,旋转,以及色调,饱和度和曝光偏移。
(3)去掉原网络最后一个卷积层,增加了三个 3 * 3 (1024 filters)的卷积层,并且在每一个卷积层后面跟一个1 * 1的卷积层,输出维度是检测所需数量。
3、YOLO-v3(18)
相比第二版本的改进点:使用残差模型和采用FPN架构(多尺度预测 )。
(1)特征提取器是一个残差模型,因为包含53个卷积层,所以称为Darknet-53,从网络结构上看,相比Darknet-19网络使用了残差单元,所以可以构建得更深。
(2)采用了3个尺度的特征图(当输入为416*416 时): (13*13),(26*26),(52*52),其中红色部分为各个尺度特征图的检测结果。YOLOv3每个位置使用3个先验框,所以使用k-means得到9个先验框,并将其划分到3个尺度特征图上,尺度更大的特征图使用更小的先验框,和SSD类似。
- 尺度1: 在基础网络之后添加一些卷积层再输出box信息.
- 尺度2: 从尺度1中的倒数第二层的卷积层上采样(x2)再与最后一个16x16大小的特征图相加,再次通过多个卷积后输出box信息.相比尺度1变大两倍.
- 尺度3: 与尺度2类似,使用了32x32大小的特征图.
(3)Softmax可被独立的多个logistic分类器替代,且准确率不会下降。分类损失采用binary cross-entropy loss。

参考博客:https://blog.csdn.net/xiaohu2022/article/details/79600037
http://www.voidcn.com/article/p-ksgrxafo-w.html
https://blog.csdn.net/hysteric314/article/details/53909408