链接:https://mp.weixin.qq.com/s/BEjj5zJG3QmxvQiqs8P4-w
softmax
CRF主要用于序列标注问题,可以简单理解为是给序列中的每一帧,既然是分类,很自然想到将这个序列用CNN或者RNN进行编码后,接一个全连接层用softmax激活,如下图所示
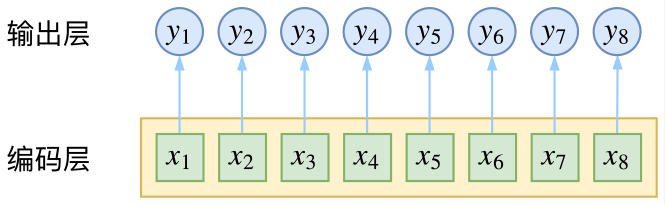
逐帧softmax并没有直接考虑输出的上下文关联
条件随机场
然而,当我们设计标签时,比如用s、b、m、e的4个标签来做字标注法的分词,目标输出序列本身会带有一些上下文关联,比如s后面就不能接m和e,等等。逐标签softmax并没有考虑这种输出层面的上下文关联,所以它意味着把这些关联放到了编码层面,希望模型能自己学到这些内容,但有时候会“强模型所难”。
而CRF则更直接一点,它将输出层面的关联分离了出来,这使得模型在学习上更为“从容”:
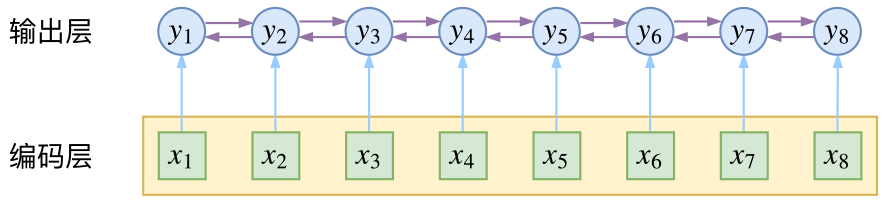

CRF在输出端显式地考虑了上下文关联
数学
当然,如果仅仅是引入输出的关联,还不仅仅是CRF的全部,CRF的真正精巧的地方,是它以路径为单位,考虑的是路径的概率。
模型概要
假如一个输入有nn帧,每一帧的标签有kk中可能性,那么理论上就有knkn中不同的输入。我们可以将它用如下的网络图进行简单的可视化。在下图中,每个点代表一个标签的可能性,点之间的连线表示标签之间的关联,而每一种标注结果,都对应着图上的一条完整的路径。
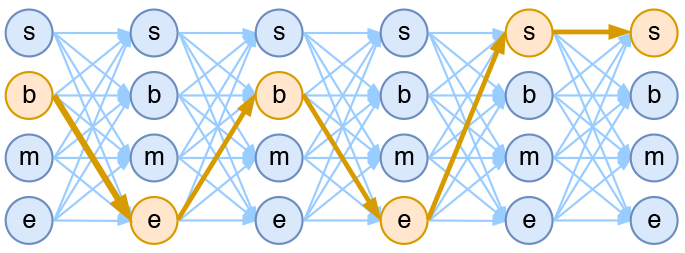
4tag分词模型中输出网络图
而在序列标注任务中,我们的正确答案是一般是唯一的。比如“今天天气不错”,如果对应的分词结果是“今天/天气/不/错”,那么目标输出序列就是bebess,除此之外别的路径都不符合要求。换言之,在序列标注任务中,我们的研究的基本单位应该是路径,我们要做的事情,是从kn条路径选出正确的一条,那就意味着,如果将它视为一个分类问题,那么将是kn类中选一类的分类问题!
这就是逐帧softmax和CRF的根本不同了:前者将序列标注看成是n个k分类问题,后者将序列标注看成是1个kn分类问题。
具体来讲,在CRF的序列标注问题中,我们要计算的是条件概率

为了得到这个概率的估计,CRF做了两个假设:
假设一 该分布是指数族分布。
这个假设意味着存在函数f(y1,…,yn;x),使得

其中Z(x)是归一化因子,因为这个是条件分布,所以归一化因子跟x有关。这个f函数可以视为一个打分函数,打分函数取指数并归一化后就得到概率分布。
假设二 输出之间的关联仅发生在相邻位置,并且关联是指数加性的
这个假设意味着f(y1,…,yn;x)可以更进一步简化为

这也就是说,现在我们只需要对每一个标签和每一个相邻标签对分别打分,然后将所有打分结果求和得到总分。
线性链CRF
管已经做了大量简化,但一般来说,上式所表示的概率模型还是过于复杂,难以求解。于是考虑到当前深度学习模型中,RNN或者层叠CNN等模型已经能够比较充分捕捉各个y与输出x的联系,因此,我们不妨考虑函数g跟x无关,那么

这时候g实际上就是一个有限的、待训练的参数矩阵而已,而单标签的打分函数h(yi;x)我们可以通过RNN或者CNN来建模。因此,该模型是可以建立的,其中概率分布变为

这就是线性链CRF的概念。
归一化因子
为了训练CRF模型,我们用最大似然方法,也就是用

作为损失函数,可以算出它等于

其中第一项是原来概率式的分子的对数,它目标的序列的打分,虽然它看上去挺迂回的,但是并不难计算。真正的难度在于分母的对数logZ(x)这一项。
归一化因子,在物理上也叫配分函数,在这里它需要我们对所有可能的路径的打分进行指数求和,而我们前面已经说到,这样的路径数是指数量级的(kn),因此直接来算几乎是不可能的。
事实上,归一化因子难算,几乎是所有概率图模型的公共难题。幸运的是,在CRF模型中,由于我们只考虑了临近标签的联系(马尔可夫假设),因此我们可以递归地算出归一化因子,这使得原来是指数级的计算量降低为线性级别。具体来说,我们将计算到时刻t的归一化因子记为Zt,并将它分为k个部分

其中![]() 分别是截止到当前时刻t中、以标签1,…,k为终点的所有路径的得分指数和。那么,我们可以递归(DP)地计算
分别是截止到当前时刻t中、以标签1,…,k为终点的所有路径的得分指数和。那么,我们可以递归(DP)地计算

它可以简单写为矩阵形式

G是对g(yi,yj)各个元素取指数后的矩阵,即G=eg(yi,yj);而H(yt+1|x)是编码模型h(yt+1|x)(RNN、CNN等)对位置t+1的各个标签的打分的指数,即H(yt+1|x)=eh(yt+1|x),也是一个向量。ZtG这一步是矩阵乘法,得到一个向量,而⊗是两个向量的逐位对应相乘

归一化因子的递归计算图示。从t到t+1时刻的计算,包括转移概率和j+1节点本身的概率
动态规划
写出损失函数−logP(y1,…,yn|x)后,就可以完成模型的训练了。假设现在有一句用于测试的句子,根据训练好的模型,我们可以算出每个时刻t对应的h值,以及CRF对应的转移概率。下面就可以进行前向动态规划求最大概率,并保存转移状态。 令dp[t][y]: 表示t时刻标签为y的路径的最大概率,那么dp[t][y]=max dp[t-1][y'], y'=1,2,3,4。pre[t][y]: 表示从上一部转移过来的最优标签y'。