1.TinyXML2的简介
第三方库TinyXML2是简单、小型、高效、开源的C++ XML文件解析库,可以很方便的应用到现有的项目之中,非常适合解析XML文件,存储简单数据,配置文件以及对象序列化等数据量不是很大的操作。
TinyXML2详细介绍与详见:TinyXML2官网。
2.TinyXML2的获取与安装
TinyXML2可以通过其Github主页获取源代码,具体来说可以采用git clone命令或直接下载其ZIP压缩包,git clone命令的调用情况如下:
git clone https://github.com/leethomason/tinyxml2
在命令行进入tinyxml2目录下,使用下列命令编译并安装TinyXML2,命令执行情况如下(其中的$符号为shell下的命令提示符):
$ sudo make install
mkdir -p /usr/local
mkdir -p /usr/local/bin
mkdir -p /usr/local/lib
mkdir -p /usr/local/include
install xmltest /usr/local/bin/xmltest
install -m 644 tinyxml2.h /usr/local/include/tinyxml2.h
install -m 644 libtinyxml2.a /usr/local/lib/libtinyxml2.a
由此,便将tinyxml2库安装到了本地环境中,在tinyxml2目录下执行如下命令,可以运行TinyXML2的测试代码:
$ xmltest
该例程执行时用到的xml文件均位于tinyxml2目录中的resources目录下,该程序执行结束后的终端提示如下图所示:

由此说明tinyxml2库已经成功安装完成。
2.TinyXML2的简单使用示例
将TinyXML2安装到本地环境之后,下面演示TinyXML2的简单使用:
将TinyXML2源码文件夹中的文件xmltest.cpp和resources/dream.xml复制到目标文件夹用于示例演示。
这里,在xmltest.c文件中引用了头文件tinyxml2.h:
#include "tinyxml2.h"
同时声明了TinyXML2的命名空间:
using namespace tinyxml2;
另外,在main函数中定义:若程序的参数大于1,则创建XMLDocument对象并加载程序参数指定的文件,最后若成功加载文件,则输出相关处理时间,该部分代码如下所示。
if ( argc > 1 ) {
XMLDocument* doc = new XMLDocument();
clock_t startTime = clock();
doc->LoadFile( argv[1] );
clock_t loadTime = clock();
int errorID = doc->ErrorID();
delete doc; doc = 0;
clock_t deleteTime = clock();
printf( "Test file '%s' loaded. ErrorID=%d\n", argv[1], errorID );
if ( !errorID ) {
printf( "Load time=%u\n", (unsigned)(loadTime - startTime) );
printf( "Delete time=%u\n", (unsigned)(deleteTime - loadTime) );
printf( "Total time=%u\n", (unsigned)(deleteTime - startTime) );
}
exit(0);
}
使用如下命令编译程序:
$ g++ -o xmltest xmltest.cpp -ltinyxml2
若出现找不到头文件或找不到静态库的错误提示,还可以手动指定头文件目录(-I)和库文件目录(-L):
$ g++ -o xmltest xmltest.cpp -I /usr/local/include -L /usr/local/lib -ltinyxml2
输入如下命令,执行示例程序:
$ xmltest dream.xml
可以看到程序输出如下,即程序成功加载了XML文件dream.xml。

3.TinyXML2在ROS中的使用
下面通过在ROS工作空间创建一个ROS功能包tinyxml_test使用TinyXML2解析ROS中的Launch文件,以此演示TnyXML2在ROS中的使用。
下面是该功能包的package.xml文件:
<?xml version="1.0"?>
<package format="2">
<name>tinyxml_test</name>
<version>0.0.0</version>
<license>TODO</license>
<maintainer email="[email protected]">jacky</maintainer>
<description>The tinyxml_test package</description>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>tf</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>tf</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>tf</exec_depend>
</package>
功能包中的Node源文件tinyxml_test_node.cpp代码如下:
#include <ros/ros.h>
#include <ros/package.h>
#include <tf/transform_broadcaster.h>
#include <tinyxml2.h>
#include <iostream>
#include <string>
#include <sstream>
#include <vector>
#include <map>
using namespace tinyxml2;//使用tinyxml2命名空间
using namespace std;
/* 功能函数 */
float String2Float(std::string numStr){
std::stringstream ss(numStr);
float num;
ss>>num;
return num;
}
int main(int argc, char **argv) {
ros::init(argc, argv, "tinyxml_test_node");
ros::NodeHandle nh("~"), nh_param("~");
std::string tf_launch_file;
//注:"test.launch"文件位于catkin_ws/src/tinyxml_test/launch/目录下
nh_param.param<std::string>("tf_launch_file", tf_launch_file,"test.launch");
/*Load launch file to get the tf args.*/
XMLDocument* doc = new XMLDocument();
std::map<std::string,tf::StampedTransform> stampedTransformMap;//用于存储多个不同坐标系之间的转换关系
std::string filePath = ros::package::getPath("tinyxml_test");//获取tinyxml_test功能包的绝对路径
filePath+="/launch/";
filePath+=tf_launch_file;
doc->LoadFile( filePath.c_str() );
int errorID = doc->ErrorID();
if(errorID){
ROS_FATAL("[radar_freespace] Failed to load launch file %s.", filePath.c_str());
return -1;
}
ROS_INFO( "[radar_freespace] Launch file '%s' loaded.", filePath.c_str());
XMLElement* rootElement = doc->RootElement();//获得根元素,即launch
std::cout<<"Root Element:"<<rootElement->Value()<<std::endl;
for(const XMLElement* element =rootElement->FirstChildElement();element;element=element->NextSiblingElement()){
const XMLAttribute* argsAttr = element->FindAttribute("args");
std::string argsAttrStr=std::string(argsAttr->Value());
std::cout<<"Args Attribute:"<<argsAttrStr<<std::endl;
std::stringstream ss(argsAttrStr);
std::vector<std::string> argStrVec;
std::string tmpArgStr = "";
while (std::getline(ss, tmpArgStr, ' ')) {
argStrVec.push_back(tmpArgStr);
}
tf::Transform transform;
transform.setOrigin(tf::Vector3(String2Float(argStrVec.at(0)),String2Float(argStrVec.at(1)),String2Float(argStrVec.at(2))));
tf::Quaternion quaternion;
quaternion.setRPY(String2Float(argStrVec.at(5)),String2Float(argStrVec.at(4)),String2Float(argStrVec.at(3)));
transform.setRotation(quaternion);
stampedTransformMap[argStrVec.at(6)]=tf::StampedTransform(transform,ros::Time::now(),argStrVec.at(6),argStrVec.at(7));
//输出launch文件中记录的坐标系转换关系
std::cout<<stampedTransformMap[argStrVec.at(6)].getOrigin().x()<<","<<stampedTransformMap[argStrVec.at(6)].getOrigin().y()<<","<<stampedTransformMap[argStrVec.at(6)].getOrigin().z()<<",";
std::cout<<stampedTransformMap[argStrVec.at(6)].getRotation().getW()<<","<<stampedTransformMap[argStrVec.at(6)].getRotation().getX()<<","<<stampedTransformMap[argStrVec.at(6)].getRotation().getY()<<","<<stampedTransformMap[argStrVec.at(6)].getRotation().getZ()<<std::endl;
}
delete doc; //删除对象
doc = NULL; //避免野指针
ros::spin();
return 0;
}
该Node能够利用TinyXML2解析本功能包中的Launch文件(XML格式),该文件为位于catkin_ws/src/tinyxml_test/launch/目录下的文件test.launch,并且最后可以根据读取的launch文件输出其中保存的tf坐标转换信息。test.launch文件的内容如下:
<?xml version="1.0"?>
<launch>
<node pkg="tf" type="static_transform_publisher" name="sensor_frame_to_world" args="2 2 2 0 0 0 world sensor_frame 100" />
<node pkg="tf" type="static_transform_publisher" name="imu_to_sensor_frame" args="0 0 0 0 0 0 sensor_frame imu 100" />
<node pkg="tf" type="static_transform_publisher" name="lidar_to_sensor_frame" args="1 1 1 0 0 0 sensor_frame lidar 100" />
</launch>
要编译该功能包,还需要修改其CMakeLists.txt文件,添加必要的功能包、包含目录、源代码和链接库等。该文件的完整内容如下:
cmake_minimum_required(VERSION 2.8.3)
project(tinyxml_test)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
roslib
tf
)
###################################
## catkin specific configuration ##
###################################
catkin_package(
LIBRARIES
${PROJECT_NAME}
CATKIN_DEPENDS
roscpp tf
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
${catkin_INCLUDE_DIRS}
)
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
add_executable(${PROJECT_NAME}_node src/tinyxml_test_node.cpp)
## Specify libraries to link a library or executable target against
target_link_libraries(${PROJECT_NAME}_node
-ltinyxml2
${catkin_LIBRARIES}
)
#############
## Install ##
#############
## Mark executables and/or libraries for installation
install(
TARGETS
${PROJECT_NAME}_node
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
需要注意的是:由于程序需要调用第三方库TinyXML2,因此需要在CMakeLists.txt文件中的find_package选项中添加roslib功能包,并在target_link_libraries选项中指定链接该静态库(-ltinyxml2)。
最后,执行命令catkin_make将功能包编译成功之后,使用如下命令运行节点(需提前运行roscore节点):
$ rosrun tinyxml_test tinyxml_test_node
程序能够输出launch文件中保存的tf坐标转换信息:
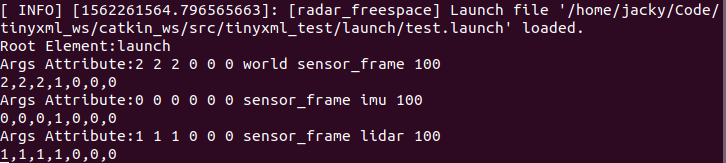
大功告成!
