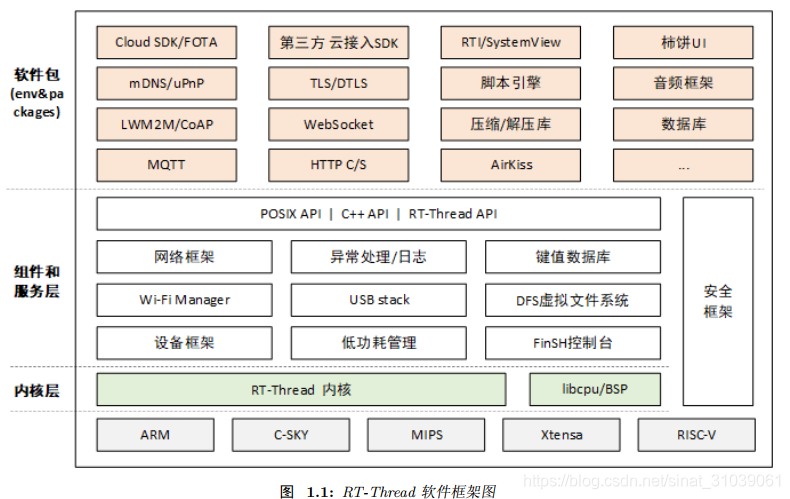
1、RT-Thread 软件架构
2、RT-Thread 内核结构

3、 预备知识
3.1链表
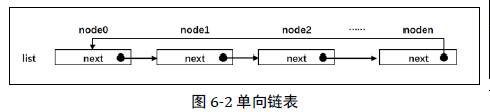
链表是通过节点把离散的数据链接成一个表,通过对节点的插入和删除操作从而实现对数据的存取。而数组是通过开辟一段连续的内存来存储数据,这是数组和链表最大的区别。数组的每个成员对应链表的节点,成员和节点的数据类型可以是标准的C类型或者是用户自定义的结构体。数组有起始地址和结束地址,而链表是一个圈,没有头和尾之分,但是为了方便节点的插入和删除操作会人为的规定一个根节点。
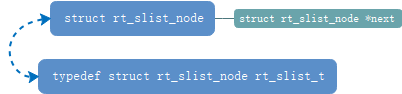
单向链表:
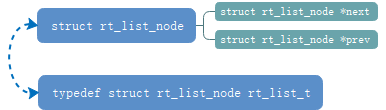
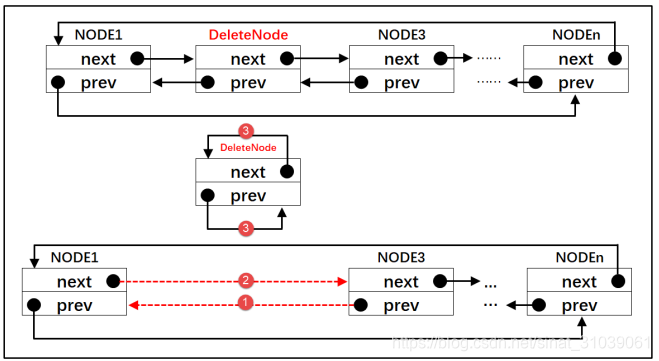
双向链表:
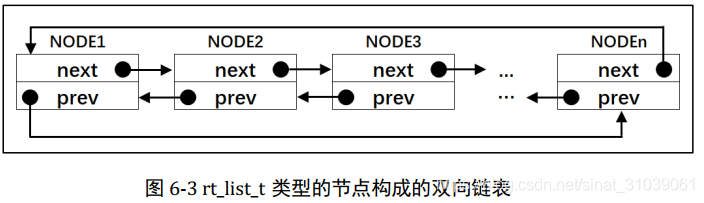
3.2 节点
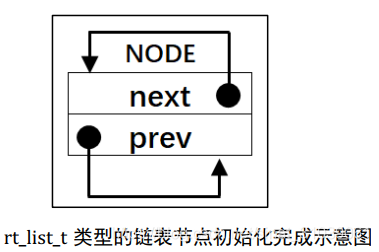
3.2.2 节点初始化
rt_inline void rt_list_init(rt_list_t *l)
{
l->next = l->prev = l;
}
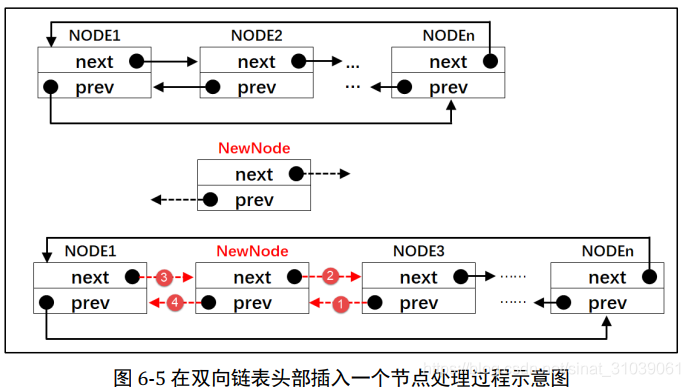
3.2.3 在双向链表表头后面插入一个节点
rt_inline void rt_list_insert_after(rt_list_t *l, rt_list_t *n)
{
l->next->prev = n;
n->next = l->next;
l->next = n;
n->prev = l;
}
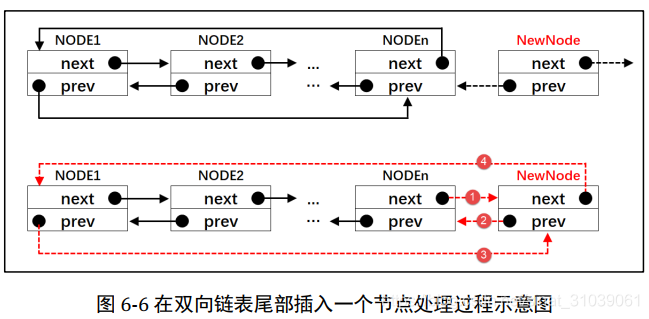
3.2.4 在双向链表表头前面插入一个节点
rt_inline void rt_list_insert_before(rt_list_t *l, rt_list_t *n)
{
l->prev->next = n;
n->prev = l->prev;
l->prev = n;
n->next = l;
}
3.2.5 从双向链表删除一个节点
rt_inline void rt_list_remove(rt_list_t *n)
{
n->next->prev = n->prev;
n->prev->next = n->next;
n->next = n->prev = n;
}
3.2.6 从节点中获取所在结构体的首地址
#define rt_list_entry(node, type, member) \
rt_container_of(node, type, member)
#define rt_list_for_each(pos, head) \
for (pos = (head)->next; pos != (head); pos = pos->next)
node 表示一个节点的地址, type 表示该节点所在的结构体的类型,
member 表示该节点在该结构体中的成员名称。
rt_container_of()的实现算法具体见图:
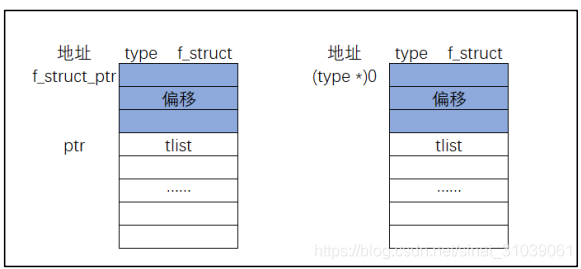
我们知道了一个节点 tlist 的地址 ptr,现在要推算出该节点所在的 type 类型的结构体的起始地址 f_struct_ptr。我们可以将 ptr 的值减去图中灰色部分的偏移的大小就可以得到 f_struct_ptr 的地址,现在的关键是如何计算出灰色部分的偏移大小。这里采取的做法是将 0 地址强制类型类型转换为 type,即(type *)0,然后通过指针访问结构体成员的方式获取到偏移的大小,即(&((type *)0)->member), 最后即可算出 f_struct_ptr = ptr -(&((type *)0)->member)。
3.3 面向对象编程思想
3.3.1 封装
3.3.2 继承
3.3.3 多态
4 内核对象管理架构
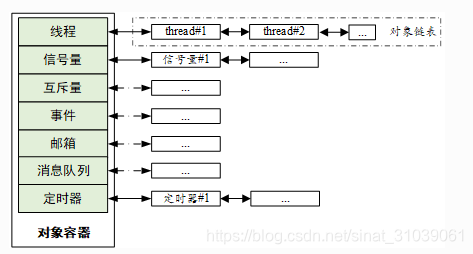
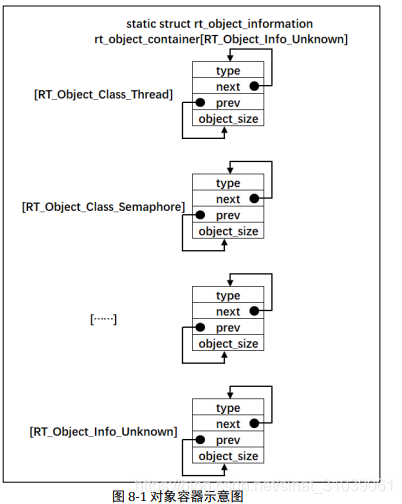
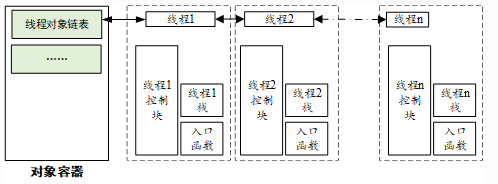
RT-Thread 采用内核对象管理系统来访问 / 管理所有内核对象,内核对象包含了内核中线程,信号量,互斥量,事件,邮箱,消息队列和定时器,内存池,设备驱动等。对象容器中包含了每类内核对象的信息,包括对象类型,大小等。对象容器给每类内核对象分配了一个链表,所有的内核对象都被链接到该链表上,如图 RT-Thread 的内核对象容器及链表如下图所示:
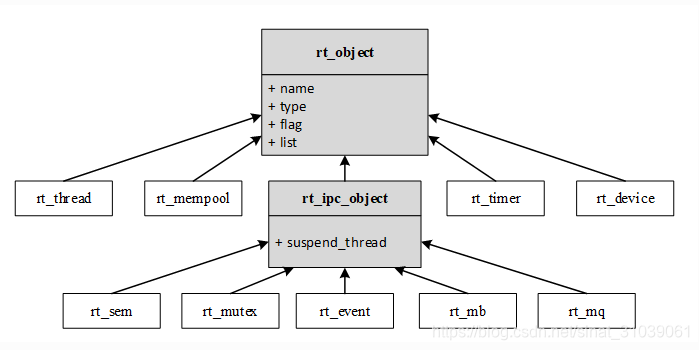
下图则显示了 RT-Thread 中各类内核对象的派生和继承关系:
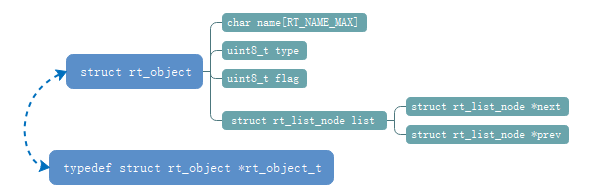
4.1 内核对象数据结构
4.1.1 对象结构
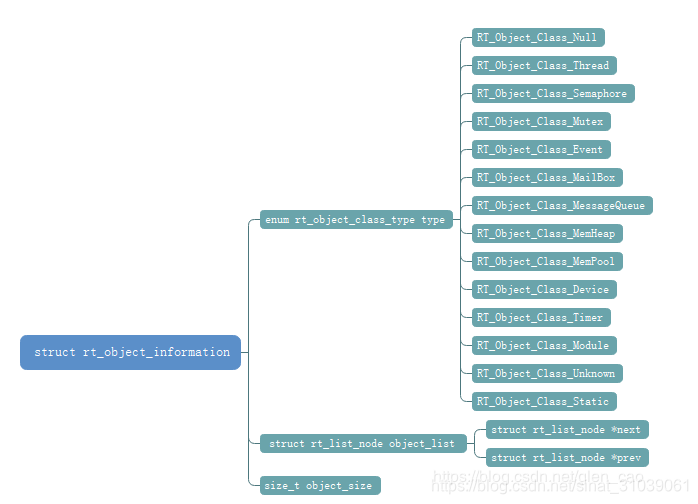
4.1.2 对象容器结构
4.1.3 初始化对象容器
容 器 是 一 个 全 部 变 量 的 数 组 , 数 据 类 型 为 struct rt_object_information, 这是一个结构体类型, 包含对象的三个信息,分别为对象类型、对象列表节点头和对象的大小。
static struct rt_object_information rt_object_container[RT_Object_Info_Unknown] =
{
/* initialize object container - thread */
{RT_Object_Class_Thread, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Thread), sizeof(struct rt_thread)},
#ifdef RT_USING_SEMAPHORE
/* initialize object container - semaphore */
{RT_Object_Class_Semaphore, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Semaphore), sizeof(struct rt_semaphore)},
#endif
#ifdef RT_USING_MUTEX
/* initialize object container - mutex */
{RT_Object_Class_Mutex, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Mutex), sizeof(struct rt_mutex)},
#endif
#ifdef RT_USING_EVENT
/* initialize object container - event */
{RT_Object_Class_Event, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Event), sizeof(struct rt_event)},
#endif
#ifdef RT_USING_MAILBOX
/* initialize object container - mailbox */
{RT_Object_Class_MailBox, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_MailBox), sizeof(struct rt_mailbox)},
#endif
#ifdef RT_USING_MESSAGEQUEUE
/* initialize object container - message queue */
{RT_Object_Class_MessageQueue, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_MessageQueue), sizeof(struct rt_messagequeue)},
#endif
#ifdef RT_USING_MEMHEAP
/* initialize object container - memory heap */
{RT_Object_Class_MemHeap, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_MemHeap), sizeof(struct rt_memheap)},
#endif
#ifdef RT_USING_MEMPOOL
/* initialize object container - memory pool */
{RT_Object_Class_MemPool, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_MemPool), sizeof(struct rt_mempool)},
#endif
#ifdef RT_USING_DEVICE
/* initialize object container - device */
{RT_Object_Class_Device, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Device), sizeof(struct rt_device)},
#endif
/* initialize object container - timer */
{RT_Object_Class_Timer, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Timer), sizeof(struct rt_timer)},
#ifdef RT_USING_MODULE
/* initialize object container - module */
{RT_Object_Class_Module, _OBJ_CONTAINER_LIST_INIT(RT_Object_Info_Module), sizeof(struct rt_dlmodule)},
#endif
};
_OBJ_CONTAINER_LIST_INIT()是一个带参宏,用于初始化一个
节点 list,在 object.c 中定义
#define _OBJ_CONTAINER_LIST_INIT(c) \
{&(rt_object_container[c].object_list), &(rt_object_container[c].object_list)}
4.1.4 从容器中获取指定类型的对象信息
struct rt_object_information *
rt_object_get_information(enum rt_object_class_type type)
{
int index;
for (index = 0; index < RT_Object_Info_Unknown; index ++)
if (rt_object_container[index].type == type) return &rt_object_container[index];
return RT_NULL;
}
4.1.5 初始化对象
每创建一个对象,都需要先将其初始化,主要分成两个部分的工作,首先将对象控制块里面与对象相关的成员初始化,然后将该对象插入到对象容器中。
/**
* This function will initialize an object and add it to object system
* management.
*
* @param object the specified object to be initialized.
* @param type the object type.
* @param name the object name. In system, the object's name must be unique.
*/
void rt_object_init(struct rt_object *object,
enum rt_object_class_type type,
const char *name)
{
register rt_base_t temp;
struct rt_list_node *node = RT_NULL;
struct rt_object_information *information;
#ifdef RT_USING_MODULE
struct rt_dlmodule *module = dlmodule_self();
#endif
/* get object information */
information = rt_object_get_information(type);
RT_ASSERT(information != RT_NULL);
/* check object type to avoid re-initialization */
/* enter critical */
rt_enter_critical();
/* try to find object */
for (node = information->object_list.next;
node != &(information->object_list);
node = node->next)
{
struct rt_object *obj;
obj = rt_list_entry(node, struct rt_object, list);
if (obj) /* skip warning when disable debug */
{
RT_ASSERT(obj != object);
}
}
/* leave critical */
rt_exit_critical();
/* initialize object's parameters */
/* set object type to static */
object->type = type | RT_Object_Class_Static;
/* copy name */
rt_strncpy(object->name, name, RT_NAME_MAX);
RT_OBJECT_HOOK_CALL(rt_object_attach_hook, (object));
/* lock interrupt */
temp = rt_hw_interrupt_disable();
#ifdef RT_USING_MODULE
if (module)
{
rt_list_insert_after(&(module->object_list), &(object->list));
object->module_id = (void *)module;
}
else
#endif
{
/* insert object into information object list */
rt_list_insert_after(&(information->object_list), &(object->list));
}
/* unlock interrupt */
rt_hw_interrupt_enable(temp);
}
4.1.6 线程结构

线程状态切换:

RT-Thread 中,实际上线程并不存在运行状态,就绪状态和运行状态是等同的。
4.1.7 初始化线程
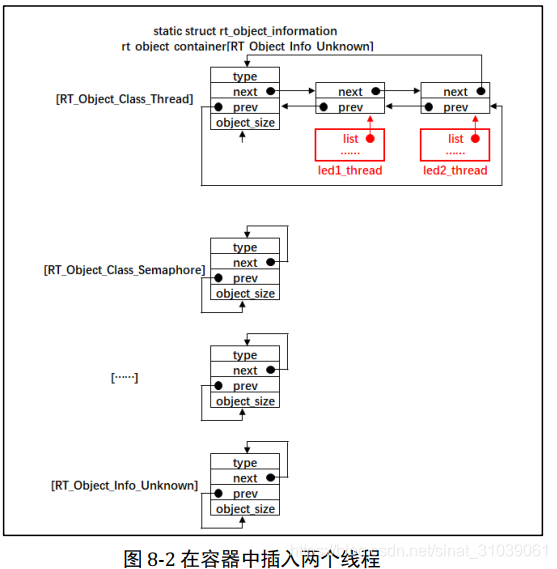
在线程初始化之后,线程通过自身的 list 节点将自身挂到容器的对象列表中,对象初始化函数在线程初始化函数里面被调用。
rt_err_t rt_thread_init(struct rt_thread *thread,
const char *name,
void (*entry)(void *parameter),
void *parameter,
void *stack_start,
rt_uint32_t stack_size,
rt_uint8_t priority,
rt_uint32_t tick)
{
/* thread check */
RT_ASSERT(thread != RT_NULL);
RT_ASSERT(stack_start != RT_NULL);
/* initialize thread object */
rt_object_init((rt_object_t)thread, RT_Object_Class_Thread, name);
return _rt_thread_init(thread,
name,
entry,
parameter,
stack_start,
stack_size,
priority,
tick);
}
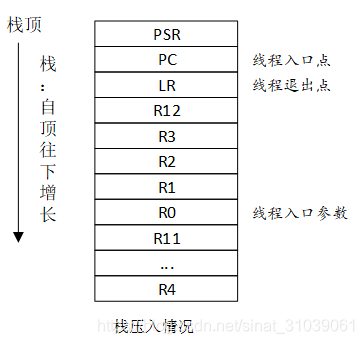
4.1.8 初始化线程栈
在动态创建线程和初始化线程的时候,会使用到内部的线程初始化函数_rt_thread_init(),_rt_thread_init() 函数会调用栈初始化函数 rt_hw_stack_init(),在栈初始化函数里会手动构造一个上下文内容,这个上下文内容将被作为每个线程第一次执行的初始值。上下文在栈里的排布如下图所示:
rt_uint8_t *rt_hw_stack_init(void *tentry,
void *parameter,
rt_uint8_t *stack_addr,
void *texit)
{
struct stack_frame *stack_frame;
rt_uint8_t *stk;
unsigned long i;
/* 对传入的栈指针做对齐处理 */
stk = stack_addr + sizeof(rt_uint32_t);
stk = (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);
stk -= sizeof(struct stack_frame);
/* 得到上下文的栈帧的指针 */
stack_frame = (struct stack_frame *)stk;
/* 把所有寄存器的默认值设置为 0xdeadbeef */
for (i = 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)
{
((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;
}
/* 根据 ARM APCS 调用标准,将第一个参数保存在 r0 寄存器 */
stack_frame->exception_stack_frame.r0 = (unsigned long)parameter;
/* 将剩下的参数寄存器都设置为 0 */
stack_frame->exception_stack_frame.r1 = 0; /* r1 寄存器 */
stack_frame->exception_stack_frame.r2 = 0; /* r2 寄存器 */
stack_frame->exception_stack_frame.r3 = 0; /* r3 寄存器 */
/* 将 IP(Intra-Procedure-call scratch register.) 设置为 0 */
stack_frame->exception_stack_frame.r12 = 0; /* r12 寄存器 */
/* 将线程退出函数的地址保存在 lr 寄存器 */
stack_frame->exception_stack_frame.lr = (unsigned long)texit;
/* 将线程入口函数的地址保存在 pc 寄存器 */
stack_frame->exception_stack_frame.pc = (unsigned long)tentry;
/* 设置 psr 的值为 0x01000000L,表示默认切换过去是 Thumb 模式 */
stack_frame->exception_stack_frame.psr = 0x01000000L;
/* 返回当前线程的栈地址 */
return stk;
}
扩展阅读:
RT-Thread代码启动过程与线程切换的实现
RT-Thread学习笔记之设备框架
RT-Thread学习笔记之FinSH组件
RT-Thread学习笔记之网络框架
