我们使用中断的目的,就是为了在中断发生时,才去读操作,避免像查询一样一直read,从而占据大量的CPU。
一、阻塞: 当进程在读取外部设备的资源(数据),资源没有准备好,进程就会休眠。
linux应用中,大部分的函数接口都是阻塞 scanf(); read(); write(); accept();
休眠读取:
程序设计目的:App去读取按键值,如果有按键中断触发(键值有改变)则打印,否则休眠.

如上框图所示:
在main函数中,进入while(1)死循环之后,执行read操作,
若按键值更新,则读取键值
若未更新,则进入休眠并等待更新,更新后,唤醒进程。
如何设置休眠机制?
1,将当前进程加入到等待队列头中 add_wait_queue(wait_queue_head_t * q, wait_queue_t * wait) 2,将当前进程状态设置成(可接受中断信号)TASK_INTERRUPTIBLE set_current_state(TASK_INTERRUPTIBLE) 3,让出调度--休眠 schedule(void)
更加智能方便的接口,可以实现以上功能:
wait_event_interruptible(wq, condition);
在驱动中如何写阻塞代码:
1,等待队列头 wait_queue_head_t init_waitqueue_head(wait_queue_head_t *q);//初始化队列头 2,在需要等待(没有数据)的时候,进行休眠 wait_event_interruptible(wait_queue_head_t wq, condition) // 内部会构建一个等待队列项/节点wait_queue_t 参数1: 等待队列头 参数2: 条件,如果是为假,就会等待,如果为真,就不会等待 可以用一标志位,来表示是否有数据 3,在一个合适的时候(有数据),会将进程唤醒 wake_up_interruptible(wait_queue_head_t *q) 用法: wake_up_interruptible(&key_dev->wq_head); //同时设置标志位 key_dev->key_state = 1;
代码示例:


1 #include <linux/init.h> 2 #include <linux/module.h> 3 #include <linux/of.h> 4 #include <linux/of_irq.h> 5 #include <linux/interrupt.h> 6 #include <linux/slab.h> 7 #include <linux/fs.h> 8 #include <linux/device.h> 9 #include <linux/kdev_t.h> 10 #include <linux/err.h> 11 #include <linux/device.h> 12 #include <asm/io.h> 13 #include <asm/uaccess.h> 14 #include <linux/wait.h> 15 #include <linux/sched.h> 16 17 18 19 #define GPXCON_REG 0X11000C20 //不可以从数据寄存器开始映射,要配置寄存器 20 #define KEY_ENTER 28 21 22 //0、设计一个描述按键的数据的对象 23 struct key_event{ 24 int code; //按键类型:home,esc,enter 25 int value; //表状态,按下,松开 26 }; 27 28 //1、设计一个全局对象——— 描述key的信息 29 struct key_desc{ 30 unsigned int dev_major; 31 int irqno; //中断号 32 struct class *cls; 33 struct device *dev; 34 void *reg_base; 35 struct key_event event; 36 wait_queue_head_t wq_head; 37 int key_state; //表示是否有数据 38 }; 39 40 struct key_desc *key_dev; 41 42 43 irqreturn_t key_irq_handler(int irqno, void *devid) 44 { 45 printk("----------%s---------",__FUNCTION__); 46 47 int value; 48 //读取按键状态 49 value = readl(key_dev->reg_base + 4) & (0x01<<2); 50 51 if(value){ 52 printk("key3 up\n"); 53 key_dev->event.code = KEY_ENTER; 54 key_dev->event.value = 0; 55 }else{ 56 printk("key3 down\n"); 57 key_dev->event.code = KEY_ENTER; 58 key_dev->event.value = 1; 59 } 60 61 //表示有数据,唤醒等待队列中的等待项 62 wake_up_interruptible(&key_dev->wq_head); 63 64 //同时设置标志位,表示有数据 65 key_dev->key_state = 1; 66 67 return IRQ_HANDLED; 68 } 69 70 71 //获取中断号 72 int get_irqno_from_node(void) 73 { 74 int irqno; 75 //获取设备树中的节点 76 struct device_node *np = of_find_node_by_path("/key_int_node"); 77 if(np){ 78 printk("find node success\n"); 79 }else{ 80 printk("find node failed\n"); 81 } 82 83 //通过节点去获取中断号 84 irqno = irq_of_parse_and_map(np, 0); 85 printk("iqrno = %d",key_dev->irqno); 86 87 return irqno; 88 } 89 90 ssize_t key_drv_read (struct file * filp, char __user * buf, size_t count, loff_t * fops) 91 { 92 //printk("----------%s---------",__FUNCTION__); 93 int ret; 94 95 //在没有数据时,进行休眠 96 //key_state在zalloc初始化空间后,为0,则阻塞 97 wait_event_interruptible(key_dev->wq_head, key_dev->key_state); 98 99 ret = copy_to_user(buf, &key_dev->event, count); 100 if(ret > 0) 101 { 102 printk("copy_to_user error\n"); 103 return -EFAULT; 104 } 105 106 107 //传递给用户数据后,将数据清除,否则APP每次读都是第一次的数据 108 memset(&key_dev->event, 0, sizeof(key_dev->event)); 109 key_dev->key_state = 0; 110 111 return count; 112 } 113 114 ssize_t key_drv_write (struct file *filp, const char __user * buf, size_t count, loff_t * fops) 115 { 116 printk("----------%s---------",__FUNCTION__); 117 return 0; 118 } 119 120 int key_drv_open (struct inode * inode, struct file *filp) 121 { 122 printk("----------%s---------",__FUNCTION__); 123 return 0; 124 } 125 126 int key_drv_close (struct inode *inode, struct file *filp) 127 { 128 printk("----------%s---------",__FUNCTION__); 129 return 0; 130 } 131 132 133 const struct file_operations key_fops = { 134 .open = key_drv_open, 135 .read = key_drv_read, 136 .write = key_drv_write, 137 .release = key_drv_close, 138 139 }; 140 141 142 143 static int __init key_drv_init(void) 144 { 145 //演示如何获取到中断号 146 int ret; 147 148 //1、设定全局设备对象并分配空间 149 key_dev = kzalloc(sizeof(struct key_desc), GFP_KERNEL); //GFP_KERNEL表正常分配内存 150 //kzalloc相比于kmalloc,不仅分配连续空间,还会将内存初始化清零 151 152 //2、动态申请设备号 153 key_dev->dev_major = register_chrdev(0, "key_drv", &key_fops); 154 155 //3、创建设备节点文件 156 key_dev->cls = class_create(THIS_MODULE, "key_cls"); 157 key_dev->dev = device_create(key_dev->cls, NULL, MKDEV(key_dev->dev_major, 0), NULL, "key0"); 158 159 //4、硬件初始化 -- 地址映射或中断申请 160 161 key_dev->reg_base = ioremap(GPXCON_REG,8); 162 163 key_dev->irqno = get_irqno_from_node(); 164 165 ret = request_irq(key_dev->irqno, key_irq_handler, IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING, 166 "key3_eint10", NULL); 167 if(ret != 0) 168 { 169 printk("request_irq error\n"); 170 return ret; 171 } 172 173 //初始化等待队列头 174 init_waitqueue_head(&key_dev->wq_head); //wait_queue_head_t *q 175 176 177 178 return 0; 179 } 180 181 static void __exit key_drv_exit(void) 182 { 183 iounmap(GPXCON_REG); 184 free_irq(key_dev->irqno, NULL); //free_irq与request_irq的最后一个参数一致 185 device_destroy(key_dev->cls, MKDEV(key_dev->dev_major, 0)); 186 class_destroy(key_dev->cls); 187 unregister_chrdev(key_dev->dev_major, "key_drv"); 188 kfree(key_dev); 189 } 190 191 192 193 module_init(key_drv_init); 194 module_exit(key_drv_exit); 195 196 MODULE_LICENSE("GPL");
1 #include <stdio.h> 2 #include <string.h> 3 #include <stdlib.h> 4 #include <unistd.h> 5 #include <sys/types.h> 6 #include <sys/stat.h> 7 #include <fcntl.h> 8 9 10 #define KEY_ENTER 28 11 12 //0、设计一个描述按键的数据的对象 13 struct key_event{ 14 int code; //按键类型:home,esc,enter 15 int value; //表状态,按下,松开 16 }; 17 18 19 int main(int argc, char *argv[]) 20 { 21 struct key_event event; 22 int fd; 23 fd = open("/dev/key0", O_RDWR); 24 if(fd < 0) 25 { 26 perror("open"); 27 exit(1); 28 } 29 30 while(1) 31 { 32 read(fd, &event, sizeof(struct key_event)); 33 34 if(event.code == KEY_ENTER) 35 { 36 if(event.value) 37 { 38 printf("APP__ key enter down\n"); 39 }else{ 40 41 printf("APP__ key enter up\n"); 42 } 43 } 44 } 45 46 close(fd); 47 48 return 0; 49 }
1 ROOTFS_DIR = /home/linux/source/rootfs#根文件系统路径 2 3 APP_NAME = key_test 4 MODULE_NAME = key_drv 5 6 CROSS_COMPILE = /home/linux/toolchains/gcc-4.6.4/bin/arm-none-linux-gnueabi- 7 CC = $(CROSS_COMPILE)gcc 8 9 ifeq ($(KERNELRELEASE),) 10 11 KERNEL_DIR = /home/linux/kernel/linux-3.14-fs4412 #编译过的内核源码的路径 12 CUR_DIR = $(shell pwd) #当前路径 13 14 all: 15 make -C $(KERNEL_DIR) M=$(CUR_DIR) modules #把当前路径编成modules 16 $(CC) $(APP_NAME).c -o $(APP_NAME) 17 @#make -C 进入到内核路径 18 @#M 指定当前路径(模块位置) 19 20 clean: 21 make -C $(KERNEL_DIR) M=$(CUR_DIR) clean 22 23 install: 24 sudo cp -raf *.ko $(APP_NAME) $(ROOTFS_DIR)/drv_module #把当前的所有.ko文件考到根文件系统的drv_module目录 25 26 else 27 28 obj-m += $(MODULE_NAME).o #指定内核要把哪个文件编译成ko 29 30 endif
测试:
./key_test & 后台运行,,top查看后台进程
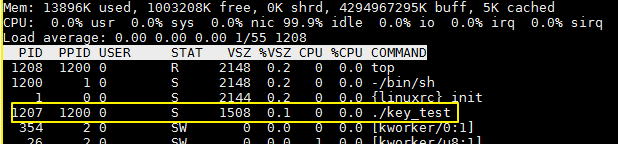
在没有按键中断时,进程休眠阻塞
二、非阻塞
在读写的时候,若没有数据,立刻返回,并且返回一个出错码
(设计上,非阻塞方式在linux中用的比较少,因为会比较消耗资源)
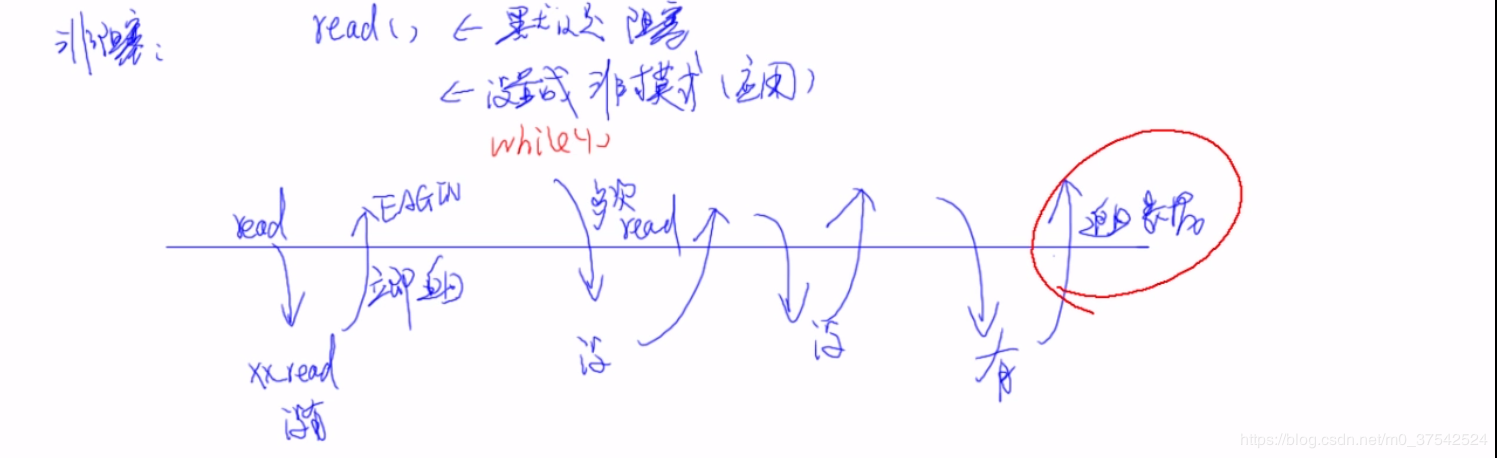
在while循环中,如果没有数据,非阻塞的方式机会一直在内核与用户空间返回出错码,消耗资源,和没有休眠的方式差不多。
用户空间: open("/dev/key0", O_RDWR|O_NONBLOCK); //将fd设置为非阻塞方式,后续的IO操作都是基于非阻塞的fd ------------------------------------ 内核空间: 驱动中需要去区分,当前模式是阻塞还是非阻塞 //如果当前是非阻塞模式,并且没有数据,立马返回一个出错码 ssize_t key_drv_read (struct file *filep, char __user *buf, size_t count, loff_t *foops) { if(filp->f_flags & O_NONBLOCK && !key_dev->key_state) return -EAGAIN; } //如果为阻塞方式 或者 非阻塞下有数据,都不满足判断,会执行以下代码,兼容非阻塞模式 .... wait_event_interruptible ....