过程控制复习_第二章
23号要考过程控制了,在这里整理一下知识点和大纲。
控制系统设计的基本步骤。
1.控制对象的确认以及控制目的的明确化。
2.测定的变量以及控制变量的选定。
3.操作变量的选择。
4.控制结构的确定。
5.控制器的设计。
控制目的的数学表达式表达

1 误差控制,控制器(Y)保持在由设定值(Ysp)附近的C指定的误差范围内。
2 安全确保,将控制器(Y)保持在YUPER下方或YLOWER上方
3 使用过程变量(x,y,u)最大化经济指标
变量的决定
我们可以直接测量控制变量吗?
·可以直接测量干扰吗?
·可以选择替代变量(Secondary Measurement)吗?
在控制变量不能直接测量的情况下,选择廉价的信赖性高的状态下测量的变量(代替变量),从那个变量的测定值推定控制量。
习题:
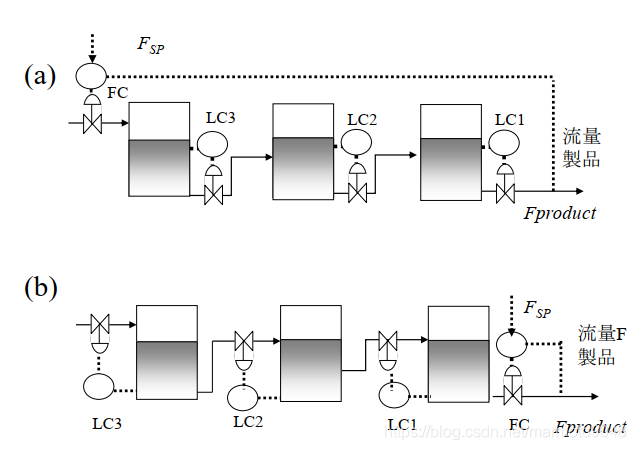
有连在一起的装置。作为储液水平和产量(产品流量)的控制,考虑了如图所示的2种方法。变更生产量的设定值Fsp时,请叙述用各种方式,多个阀门的开度是如何按顺序开始的。另外,要改变产量后所有装置变得稳定,哪种控制方式更快呢?
多重循环控制
N个控制变量,N个操作变量的多输入。
针对多输出系统的多层循环控制系统。
配对的一般规则。
·选择直接影响控制变量的操作变量。
选择移动操作变量的影响较早出现在控制变量中的数据对。
选择其他控制变量·操作变量影响较小的对。(干扰少的)
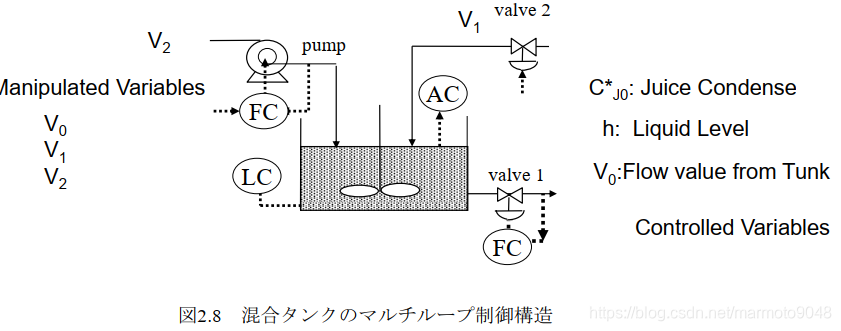
例2.6橙汁生产过程浓缩果汁混合罐的多层循环控制目的:将罐的流量保持在v0,果汁的浓度保持在C*J0,罐内的液体水平保持为h.。(控制变量3)操作变量:从罐中拔出流量v0、稀释水的供给流量v1、浓缩果汁的供给量v2
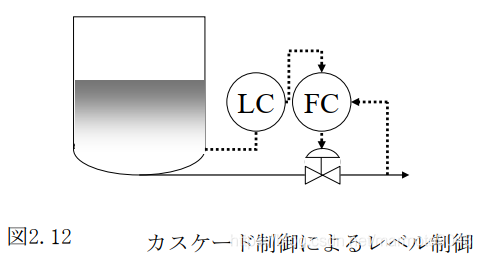
级联控制(串级控制系统)
由两个控制器构成一个控制器的输出值被用作另一个控制器的设定值的控制结构被称为“级联控制”
快速应对干扰
改善被控对象的动特性
例子:
在直接操作变量、阀门开度与流量的关系容易打乱罐液级的控制阀门开度的情况下,控制性能变差
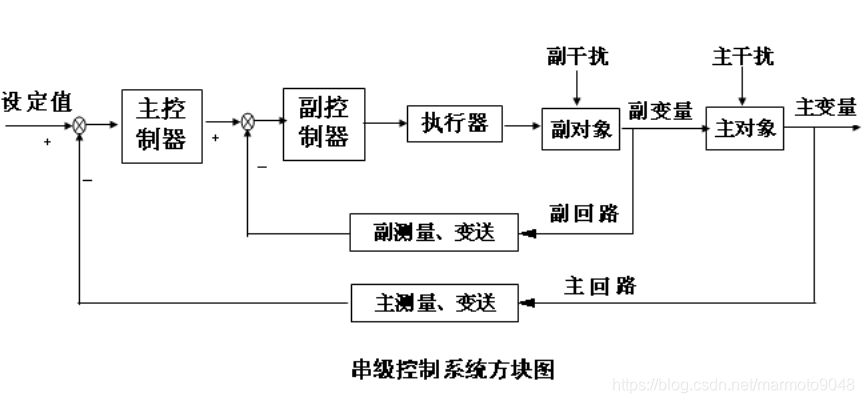
特点,工作过程
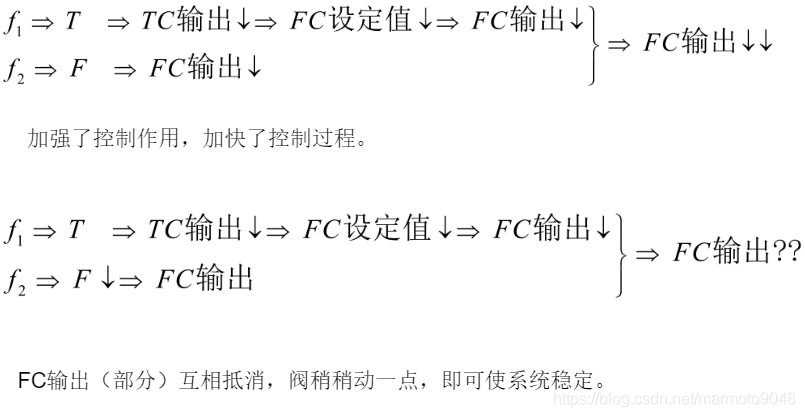
干扰作用于副对象:
f2引起f变化,控制器fc及时进行控制,使其很快稳定下来。
如果干扰量小,经过副回路控制后,f2一般影响不到温度T
如果干扰量大,大部分影响被副回路克服
1 由于副回路控制通道短,时间常数小,当干扰进入副回路时可以获得比单回路控制系统超前的控制作用,大大提高控制质量。
2 能改善控制通道的动态特性,提高系统的快速反应能力
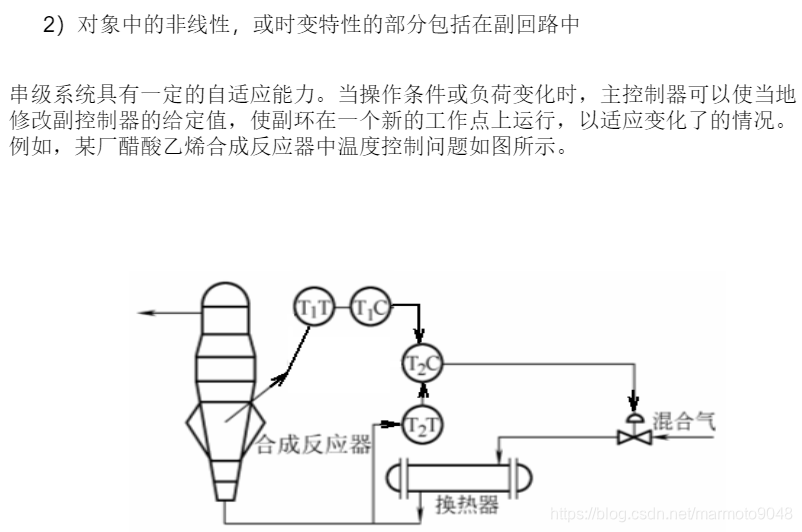
3 对非线性情况系的负荷或操作条件的变化有一定的自适应能力。
干扰作用于主对象:

干扰作用于副回路和主对象:
主副变量选择:
主变量选择原则:同单回路受控变量选择原则
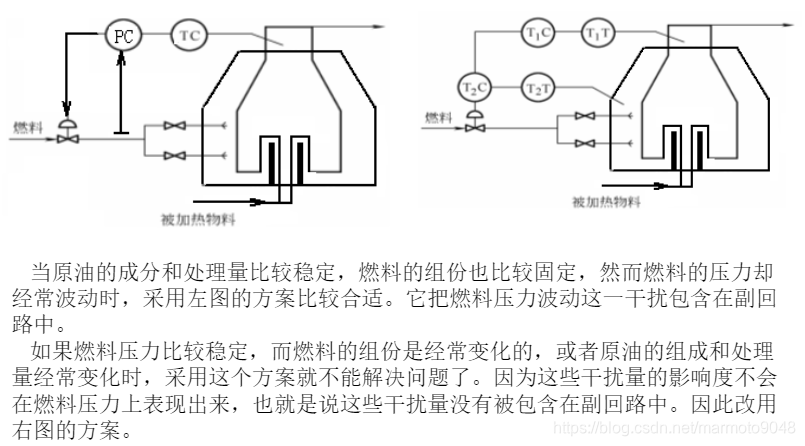
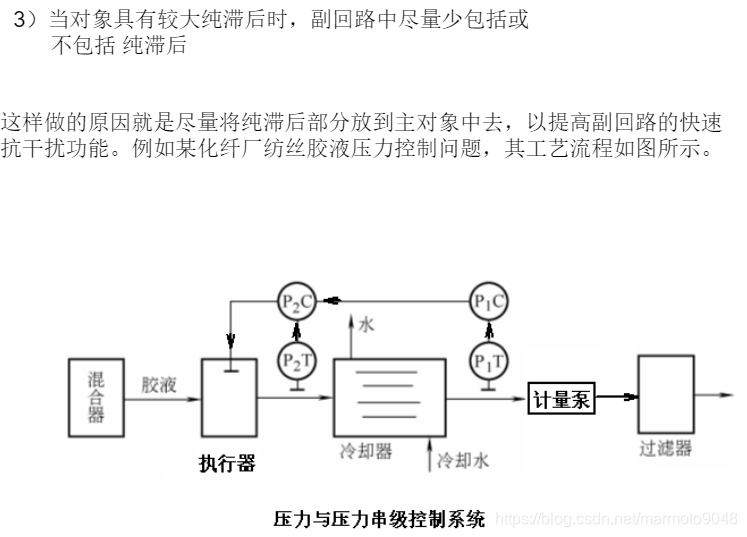
副变量选择原则:副变量的选择和副回路的设计是串级控制的关键。副回路必须要包括主要干扰,而且应包括更多一些的干扰。
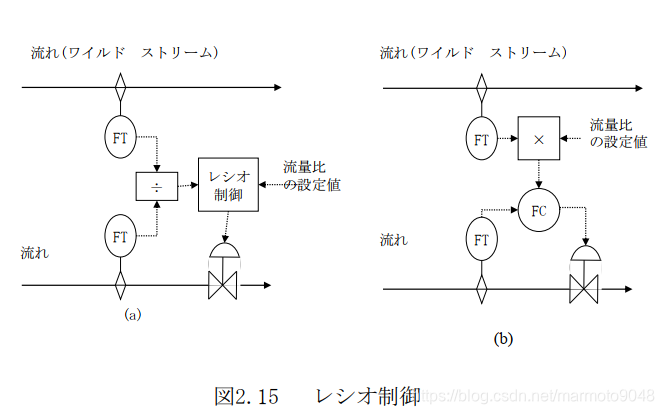
受体控制(Ratio Control)·
复数种类的原料,规定的混合比供给的情况和,复数的配管流动的流体那样规定的流量比流动的情况-现在,两个流体,各自不同的配管(线)流动装置供给。-两条线的流量都是可以测量的,但其中一方的线不具有用于操作流量的阀门。
选择控制
操作变量的数量不充分到能够控制所有的控制变量的情况下,根据操作条件和专业的运转模式,选择控制变量中等最应该优先控制的变量进行控制。·将其选择按照某种逻辑自动进行的控制结构称为选择控制。
Override control(Override Control)。
·为了确保安全性,某个变量的值。
控制不超过特定的界限(阈值)。
-但如果你不能超越它的极限,
因为你不需要严密控制那个变量,
在控制中使用的操作变量为其他制。
用于控制变量。
这种控制称为过盈控制
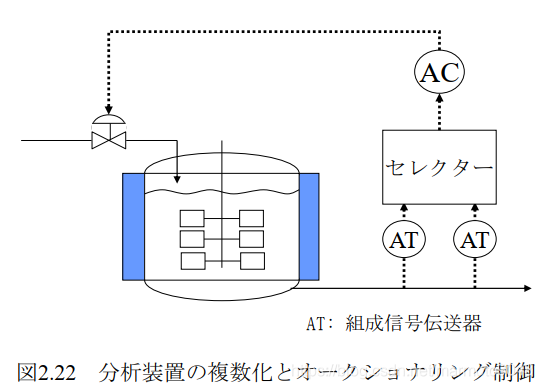
拍卖控制(Auctioneering Control)
温度、压力等同种过程变量的复数的测定值的情况下,从多个测定值中选择最大或最小的作为控制变量。
反应器的拍卖控制
用多个分析仪测量产品的浓度并进行控制。
·为了更安全地开车,开关呢?
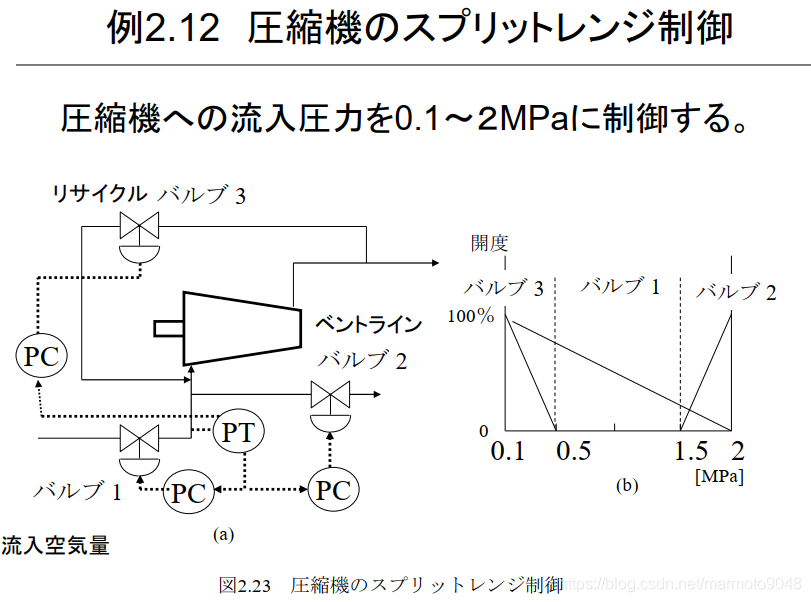
分流范围控制(Split-range control)
·过载控制、拍卖控制对于多个控制变量移动一个操作变量。
分程范围控制。
根据一个控制变量的测定值,分开使用多个操作变量的控制结构。
三种级联控制:
级联控制1为采用模拟量级联方式,
级联控制2为采用通讯的方式,
级联控制3为采用高速脉冲DI/DO的方式。
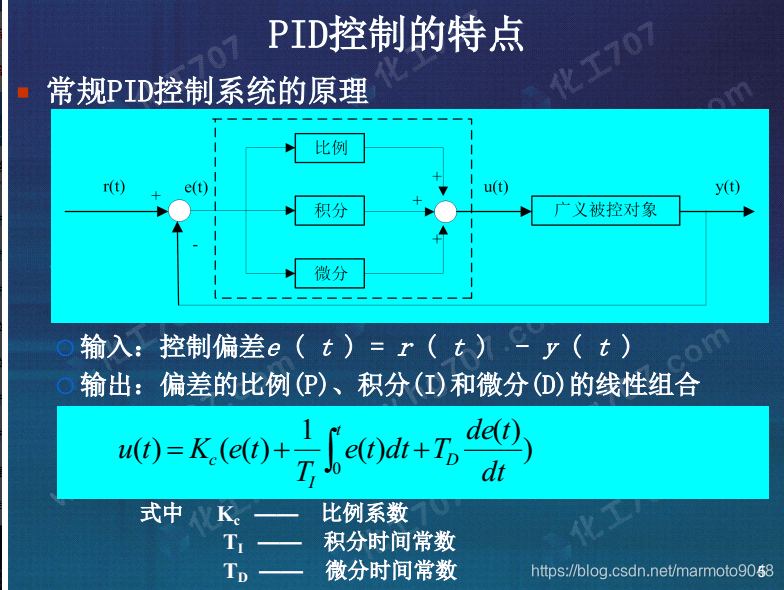
PID制御:比例积分微分控制,是反馈控制(根据误差进行的控制)
比例、积分和微分控制器。
在时刻t由控制器计算的操作变量的值为u(T)控制变量的测定值为y(T)设定值为r(T)。
·在时刻t0稳定状态,u0,y0偏差e(T)=r(T)-y(T)

如果从液体水平(控制变量)y被控制在某个设定值r0的状态,将设定值重新变化为r的话,会怎么样呢?·
液级为r0,处于稳定状态时的阀门开度为u0。·
新的设定值r被添加到比较部分的瞬间偏差e不是零,只有比例控制的部分(Kce(T))的操作变量从u0开始变化。·
液体水平y逐渐接近新的设定值r*。Kce(T)的值也变小。
固定的偏差。
·仅仅是将流入量作为操作变量的比例控制,罐的液体水平y绝对不会成为设定值r*。即,偏差e不为零。这个偏差称为固定偏差(偏移:offset)。
·理由:假定操作量为u0,液体水平y=r的稳定状态,流出流量v0遵从Bernoulli法则,V0®=α®^0.5=vi®=u0
另一方,液体水平为y处于稳定状态时,
V0(y)=α(y*)^0.5=vi(y*)=u(y*)
现在,在比例控制下进行从r到r的设定变更,如果液体水平以y达到稳定,通过u(y*)=Kce(∞)+u0
比例控制不会留下稳定偏差,则根据上式u(y*)=u0
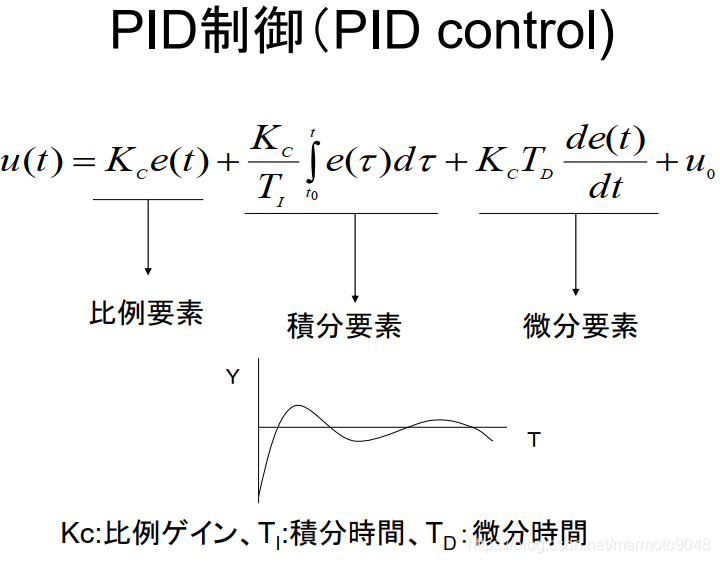
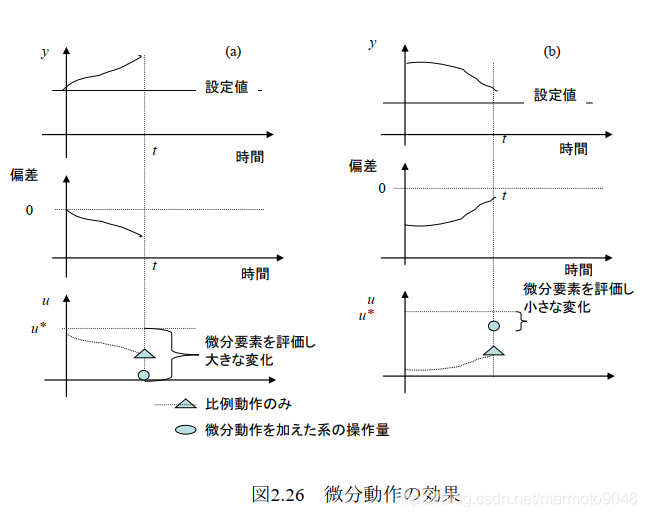
積分動作と微分動作
·弥补比例控制的缺点,消除偏移的东西就是积分动作。·
只要偏差不为零,积分动作的偏差的积分值就会持续变化。·
微分动作用于到稳定为止的速度的调整。与偏差的变化速度成比例决定操作量的微分动作,根据其变化速度预测下一步的偏差值来决定操作量。
液级PID控制的比例带
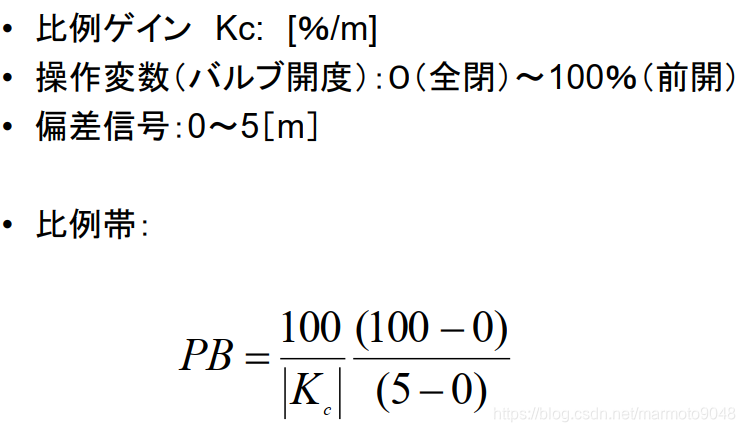
PID调节器比例增益、比例度、比例带
PID调节器的比例增益KP****是比例度δ的倒数,
比例度和比例带是等效的。
现在的PID调节器、DCS系统和PLC系统中P大多指以比例增益
为了便于理解,可以把PID调节器的比例作用想象为一个双端指针,如图1所示。
支点在中间(相当于100%比例度),指针两端沿着偏差标尺和输出标尺移动,若测量值与给定值重合时,偏差为零,这就是PID调节器的正常工作点,也就是PID调节器的控制点,不管比例带多大,当PID调节器的输入偏差为零时,输出总是预设的比例偏置值(50%),输出值在此值上下变化以减小偏差,支点的位置确定了对于一定的偏差变化输出的大小,
即支点在中间时测量值变化100%,输出就从0%变化到100%。将支点向左移,为了使输出变化100%,则测量值变化减小到50%。也即从设定值-25%~+25%,
同理当支点右移时,测量值已变化100%(即从程-50%~+50%),输出变化仅为50%。
从上述可知比例作用就是PID调节器的输出信号与输入信号成比例关系,即:△P=Ke+△Pi,即比例调节器就是一个放大倍数(即增益)可调的放大器。比例增益和比例度都反映了调节器对偏差变化的灵敏度大小。在电、气动调节器(控制器)中都不用比例增益作为刻度,而是用比例度来刻度的。
比例增益是指输出变化对偏差变化之比。而比例度则是指调节器的偏差值占输出值变化的百分比。这两种表示方法互为倒数关系,即:KP=1/δ。比例增益和比例度的对应关系如图1所示。
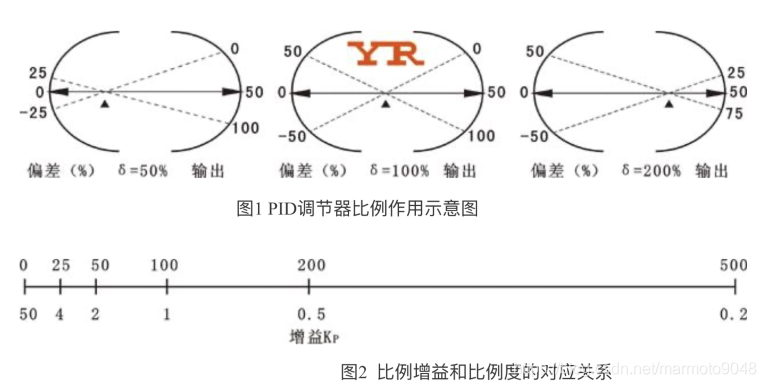
PID调节器比例作用示意图 图1 PID调节器比例作用示意图
比例增益和比例度的对应关系 图2 比例增益和比例度的对应关系
下面举个例子进行说明,某PID调节器用比例作用时,当输入5mA,出从4mA变化到20mA,此时该控制器的比例度和增益如下:
δ=(5-4)/(20-4)=6.25%;KP=1/δ=16
调节器比例带示意图
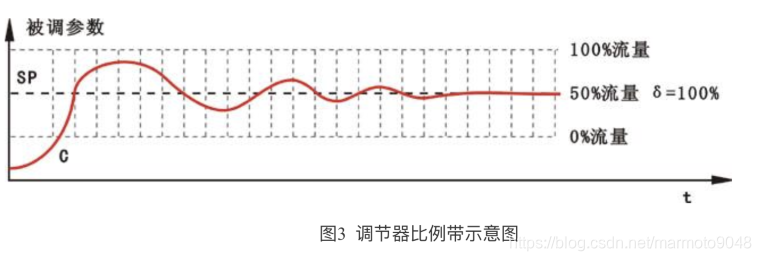
图3 调节器比例带示意图
再谈谈比例带。图3是一个最常见的过渡过程曲线,图中SP表示设定值;C表示被调参数的变化。斜线的带就是比例度δ。从图可知比例度是测量值的一个有效变化范围,当测量值在此范围内变化,PID调节器输出会跟着变化,从而产生有效的控制作用。当测量值超出这个范围之外时,调节器输出已饱和,从而失去控制作用。此外也可把比例度理解为是一条记录仪上的带,其中心线是给定值,当测量值偏离中心线时,偏差离中心线越大,控制作用越强。比例度越小,在图上表示比例度的带越窄,控制的灵敏度越高。所以有人把表示比例度的这条带成为比例带。所以说比例带与比例度是等效的。
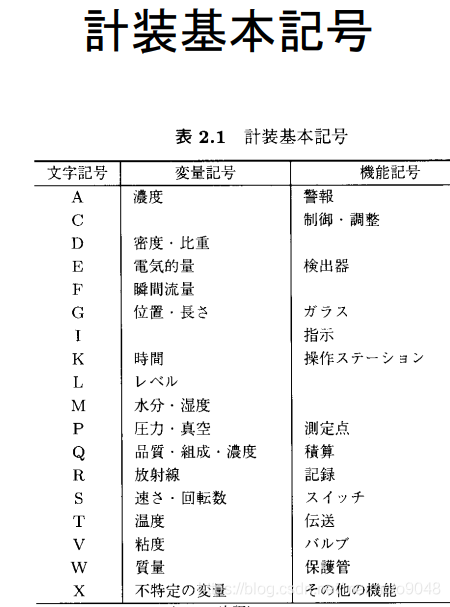
仪表记号。
·变量符号·功能符号-个别号码。
1.变量符号在该设备中处理的过程变量的种类(F:=流量计,T:=温度,L:水平,P:=压力计)。
2.功能符号显示该设备的基本功能。
(I:=指示,R:=记录,C:=控制器,T:=传输,E:=检测)。
3.个别号码为了识别该机器在各循环上附加的序列号
比例调节(P调节)
p调节中,调节器的输出信号u和偏差信号e成比例
Kc成为比例增益(可以设置正负)
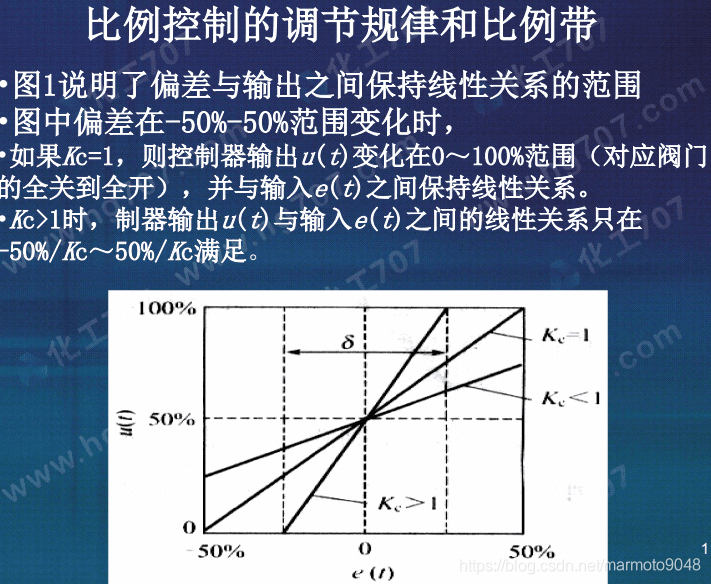
在实际应用中,由于执行器的运动有限,控制器的输出u(t)也被限制在一定的范围内。(Kc比较大时,偏差e(t)仅在一定范围内和控制器的输出保持线性关系。)
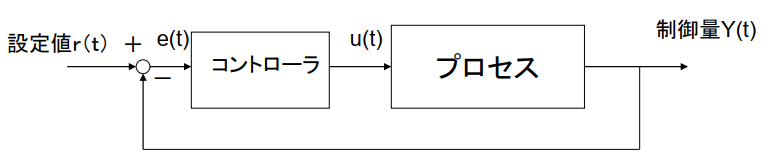
控制系统的结构
·传感器(Senor):控制量、干扰用编译装置测定的机器。
·传送器(Transmitter):将通过传感器测量的信息传达给控制器的机器。
·转换器:将用传感器测量的状态量(温度、压力、浓度等)变换为电流和电压的机器。现场总线(共用信号)。
·控制器:决定操作量的机器。使用数字计算机等。
·执行器(Actuator):fainal control element。
在过程中执行由控制器计算的操作量的机器。
阀门,泵,电机,压缩机等
传输器和转换器。
将来自计算机的信号转换为电流/电压并传送到驱动器的设备。
相反,将电流、电压信号转换为能够用计算机处理的数字值的机器也称为转换器。
·D/A和A/D转换器。
传感器信号转换为电流值(4~20 mA)。
·用I/E变换将电流转换为电压。
将模拟信号(电压)转换为数字信号(A/D)。
数字信号到电压的转换(D/A)。
变换器的增益。
·将0.1~10 MPa的压力转换为4~20 mA的电流。
考虑P/I转换器。
·变换器的跨度(Span):9.9 MPa。
·变换器的零:0.1 MPa。
·变换器的增益:16 mA/9.9 MPa。
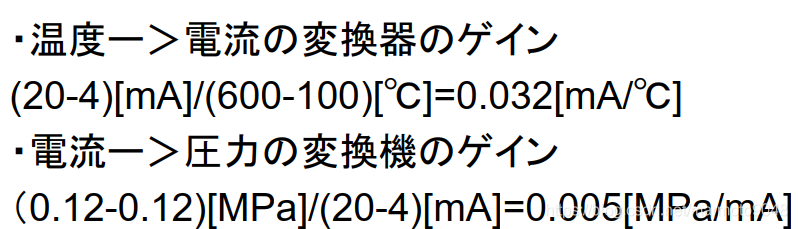
例题1:测量温度操作阀门开度的控制系统。
·温度的测量范围:100~600。
用转换器将其转换为4至20 mA并传输到控制器。
·这个变换器的增益?3000时的转换器输出?
例题2:将4~20 mA的电流变换为0.12~0.2 MPa的气压,求出移动阀门时的I/P转换器的增益。
例3.2:用8位的A/D转换器将05V的电压变换为数字信号(0255)。分辨率?数字信号为248和12的电压值是多少?
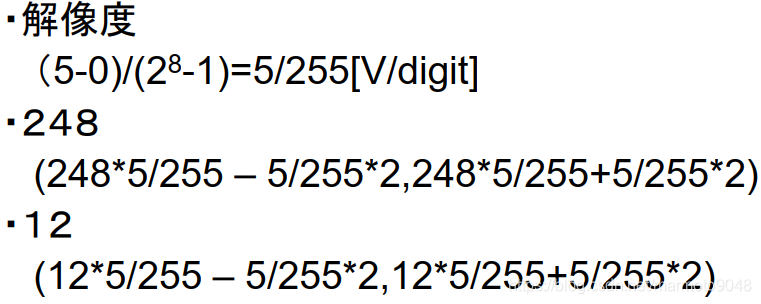
用3.2的转换器将0.1V和4.5V变换为数字值。在各变换中,考虑相当于分辨率的1/2的误差。

明显接近0V的测定值相对误差越大。
因此,传感器信号向电压的转换达到1V以上。
被转换的情况很多。
Reference
[1]. https://max.book118.com/html/2018/1114/8130115030001133.shtm
