1、Marker检测
对于aruco的检测,是opencv中自带的检测库,进行检测时,需要先进行Marker库的定义,这个库需要与你生成的aruco码(生成aruco码方法)的定义一致,否则也检测不到。该代码可以检测Apriltag,只需将Marker库更换为“DICT_APRILTAG_***”即可。
// aruco_code_detect.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include "pch.h"
#include <iostream>
#include <opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
#include <opencv2/aruco/charuco.hpp>
#include "opencv2/imgproc.hpp"
using namespace cv;
using namespace std;
void maker_test(Mat image)
{
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
cv::Ptr<cv::aruco::DetectorParameters> params = aruco::DetectorParameters::create();
params->cornerRefinementMethod = cv::aruco::CORNER_REFINE_NONE;
cv::Mat imageCopy;
image.copyTo(imageCopy);
std::vector<int> ids;
std::vector<std::vector<cv::Point2f>> corners, rejected;
cv::aruco::detectMarkers(image, dictionary, corners, ids, params);
// if at least one marker detected
if (ids.size() > 0)
{
cv::aruco::drawDetectedMarkers(imageCopy, corners, ids);
cv::imshow("test", imageCopy);
cv::waitKey();
}
int main()
{
Mat img = cv::imread("test.jpg", 1);
maker_test(img);
}
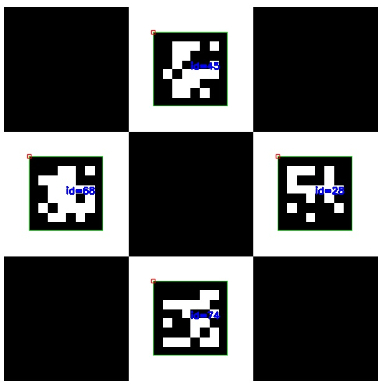
检测结果如下:
2、位姿估计
根据opencv中estimatePoseSingleMarkers()可以得到Marker坐标系到相机坐标系旋转向量和平移向量。
cv::VideoCapture inputVideo;
inputVideo.open(0);
cv::Mat cameraMatrix, distCoeffs;
// camera parameters are read from somewhere
readCameraParameters(cameraMatrix, distCoeffs);//cameraMatrix为3×3矩阵,distCoeffs为4,58或12个元素,根据你的畸变情况得到
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
while (inputVideo.grab()) {
cv::Mat image, imageCopy;
inputVideo.retrieve(image);
image.copyTo(imageCopy);
std::vector<int> ids;
std::vector<std::vector<cv::Point2f>> corners;
cv::aruco::detectMarkers(image, dictionary, corners, ids);
// if at least one marker detected
if (ids.size() > 0) {
cv::aruco::drawDetectedMarkers(imageCopy, corners, ids);
std::vector<cv::Vec3d> rvecs, tvecs;
cv::aruco::estimatePoseSingleMarkers(corners, 0.05, cameraMatrix, distCoeffs, rvecs, tvecs);
// draw axis for each marker
for(int i=0; i<ids.size(); i++)
cv::aruco::drawAxis(imageCopy, cameraMatrix, distCoeffs, rvecs[i], tvecs[i], 0.1);
}
cv::imshow("out", imageCopy);
char key = (char) cv::waitKey(waitTime);
if (key == 27)
break;
}
上述得到的旋转和平移向量是,Marker坐标系到相机坐标系的转化,故有:

根据如下旋转和平移关系,可以得到摄像头在Marker坐标系的世界坐标系。
实际中摄像头在其自身坐标系的坐标为[0,0,0],故此得到摄像头在Marker的世界坐标为:

其中[Xm,Ym,Zm]是指在Marker坐标系中的坐标,[Xc,Yc,Zc]是指在摄像头坐标系中的坐标,注意坐标轴的建立方向。
我自己做了几个利用单个aruco定位的测试,测试数据如下,考虑手动摆放和测量的误差,距离定位精度大致为1~4cm误差,角度定位误差大致为3°。(实际上我测试的是上述公式中的第一种情况,即定位物体中心,而不是摄像头的位置,其中物体中心在摄像头的坐标是[0,0,L/2](L为物体的长度,摄像头安装位置如下图所示,该图为俯视图),但是实际上x,y坐标并不是等于0的,因此测试摄像头的结果,可能误差更小)

| case | id | x_set | y_set | theta_set | x_detect | y_detect | theta_detect | x_bias | y_bias | theta_bias |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 11 | -90 | 68 | 0 | 91.9 | 66.38 | 2.36 | -1.9 | -1.62 | 2.36 |
| 2 | 12 | 59 | -104 | 90 | 63.03 | -106.12 | 86.71 | 4.03 | -2.12 | -3.29 |
| 3 | 13 | 58 | 209.5 | -90 | 54.2 | 208.84 | -91.9 | -3.8 | -0.66 | -1.9 |
| 4 | 14 | 214 | 48 | 180 | 216.3 | 49.8 | 178.79 | 2.3 | 1.8 | -1.21 |
上述测试中距离单位为厘米,角度单位为度。
