【中英】【吴恩达课后测验】Course 3 -结构化机器学习项目 - 第二周测验 - 自动驾驶(案例研究)
第2周测验 - 自动驾驶(案例研究)
为了帮助你练习机器学习策略,本周我们将介绍另一种场景并询问你将如何做。我们认为这个在机器学习项目中工作的“模拟器”将给出一个引导机器学习项目的任务。
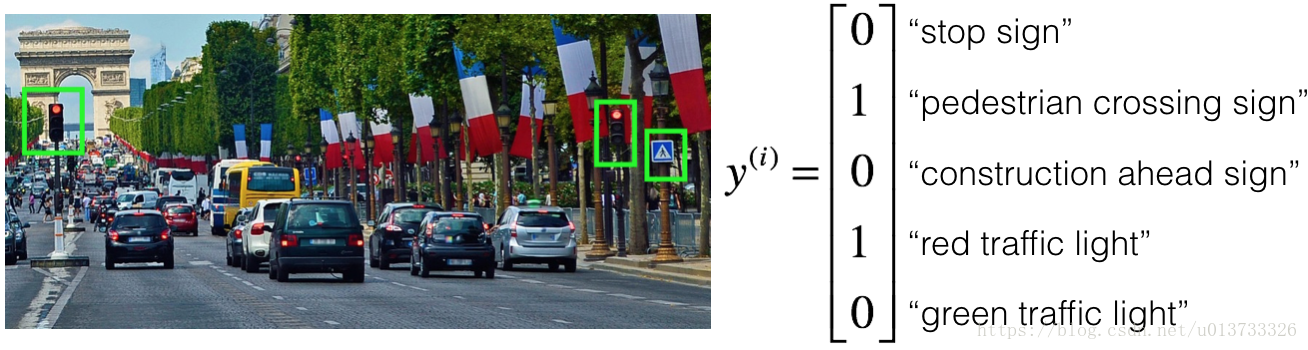
你受雇于一家创业的自动驾驶的创业公司。您负责检测图片中的路标(停车标志,行人过路标志,前方施工标志)和交通信号标志(红灯和绿灯),目标是识别哪些对象出现在每个图片中。例如,上面的图片包含一个行人过路标志和红色交通信号灯标志。
您的100,000张带标签的图片是使用您汽车的前置摄像头拍摄的,这也是你最关心的数据分布,您认为您可以从互联网上获得更大的数据集,即使互联网数据的分布不相同,这也可能对训练有所帮助。你刚刚开始着手这个项目,你做的第一件事是什么?假设下面的每个步骤将花费大约相等的时间(大约几天)。【 】 花几天时间去获取互联网的数据,这样你就能更好地了解哪些数据是可用的。
【 】 花几天的时间检查这些任务的人类表现,以便能够得到贝叶斯误差的准确估计。
【 】 花几天的时间使用汽车前置摄像头采集更多数据,以更好地了解每单位时间可收集多少数据。
【
★】 花几天时间训练一个基本模型,看看它会犯什么错误。
As seen in the lecture multiple times , Machine Learning is a highly iterative process. We need to create, code, and experiment on a basic model, and then iterate in order to find out the model that works best for the given problem.。
正如在视频中多次看到的,机器学习是一个高度迭代的过程。我们需要在基本模型上创建、编码和实验,然后迭代以找出对给定问题最有效的模型。您的目标是检测道路标志(停车标志、行人过路标志、前方施工标志)和交通信号(红灯和绿灯)的图片,目标是识别这些图片中的哪一个标志出现在每个图片中。 您计划在隐藏层中使用带有ReLU单位的深层神经网络。
对于输出层,使用Softmax激活将是输出层的一个比较好的选择,因为这是一个多任务学习问题,对吗?
【 】 True
【
★】 False
Softmax would have been a good choice if one and only one of the possibilities (stop sign, speed bump, pedestrian crossing, green light and red light) was present in each image. Since it is not the case , softmax activation cannot be used.
如果每个图片中只有一个可能性:停止标志、减速带、人行横道、红绿灯, 那么SoftMax将是一个很好的选择。由于不是这种情况,所以不能使用Softmax 激活函数。你正在做误差分析并计算错误率,在这些数据集中,你认为你应该手动仔细地检查哪些图片(每张图片都做检查)?
- 【 】 随机选择10,000图片
- 【 】 随机选择500图片
- 【
★】 500张算法分类错误的图片。 - 【 】 10,000张算法分类错误的图片。
It is of prime importance to look at those images on which the algorithm has made a mistake. Since it is not practical to look at every image the algorithm has made a mistake on , we need to randomly choose 500 such images and analyse the reason for such errors.
查看算法分类出错的那些图片是非常重要的,由于查看算法分类错误造成的每个图片都不太实际,所以我们需要随机选择500个这样的图片并分析出现这种错误的原因。在处理了数据几周后,你的团队得到以下数据:
- 100,000 张使用汽车前摄像头拍摄的标记了的图片。
- 900,000 张从互联网下载的标记了道路的图片。
每张图片的标签都精确地表示任何的特定路标和交通信号的组合。 例如, = 表示图片包含了停车标志和红色交通信号灯。
因为这是一个多任务学习问题,你需要让所有 向量被完全标记。 如果一个样本等于 ,那么学习算法将无法使用该样本,是正确的吗?- 【 】 正确
- 【
★】 错误
In the lecture on multi-task learning, you have seen that you can compute the cost even if some entries haven’t been labeled. The algorithm won’t be influenced by the fact that some entries in the data weren’t labeled.
在多任务学习的视频中,您已经看到,即使某些条目没有被标记,您也可以计算成本。该算法不会受到数据中某些条目未标记的样本的影响。你所关心的数据的分布包含了你汽车的前置摄像头的图片,这与你在网上找到并下载的图片不同。如何将数据集分割为训练/开发/测试集?
【 】 将10万张前摄像头的图片与在网上找到的90万张图片随机混合,使得所有数据都随机分布。 将有100万张图片的数据集分割为:有60万张图片的训练集、有20万张图片的开发集和有20万张图片的测试集。
【 】 将10万张前摄像头的图片与在网上找到的90万张图片随机混合,使得所有数据都随机分布。将有100万张图片的数据集分割为:有98万张图片的训练集、有1万张图片的开发集和有1万张图片的测试集。
【
★】 选择从互联网上的90万张图片和汽车前置摄像头的8万张图片作为训练集,剩余的2万张图片在开发集和测试集中平均分配。【 】 选择从互联网上的90万张图片和汽车前置摄像头的2万张图片作为训练集,剩余的8万张图片在开发集和测试集中平均分配。
As seen in lecture, it is important to distribute your data in such a manner that your training and dev set have a distribution that resembles the “real life” data. Also , the test set should contain adeqate amount of “real-life” data you actually care about.
正如在课堂上看到的那样,分配数据的方式非常重要,您的训练和开发集的分布类似于“现实生活”数据。此外,测试集应包含您实际关心的足够数量的“现实生活”数据。假设您最终选择了以下拆分数据集的方式:
数据集 图片数量 算法产生的错误 训练集 随机抽取94万张图片(从90万张互联网图片 + 6万张汽车前摄像头拍摄的图片中抽取) 8.8% 训练-开发集 随机抽取2万张图片(从90万张互联网图片 + 6万张汽车前摄像头拍摄的图片中抽取) 9.1% 开发集 2万张汽车前摄像头拍摄的图片 14.3% 测试集 2万张汽车前摄像头拍摄的图片 14.8% 您还知道道路标志和交通信号分类的人为错误率大约为0.5%。以下哪项是真的(检查所有选项)?
【 】 由于开发集和测试集的错误率非常接近,所以你过拟合了开发集。
【
★】 你有一个很大的数据不匹配问题,因为你的模型在训练-开发集上比在开发集上做得好得多。【
★】 你有一个很大的可避免偏差问题,因为你的训练集上的错误率比人为错误率高很多。【 】你有很大的方差的问题,因为你的训练集上的错误率比人为错误率要高得多。
【 】 你有很大的方差的问题,因为你的模型不能很好地适应来自同一训练集上的分布的数据,即使是它从来没有见过的数据。
根据上一个问题的表格,一位朋友认为训练数据分布比开发/测试分布要容易得多。你怎么看?
【 】 你的朋友是对的。 (即训练数据分布的贝叶斯误差可能低于开发/测试分布)。
【 】 你的朋友错了。(即训练数据分布的贝叶斯误差可能比开发/测试分布更高)。
【
★】 没有足够的信息来判断你的朋友是对还是错。【 】 无论你的朋友是对还是错,这些信息都对你没有用。
To get an idea of this, we will have to measure human-level error separately on both distributions.The algorithm does better on the distribution data it is trained on. But we do not know for certain that it was because it was trained on that data or if it was really easier than the dev/test distribution.
为了了解这一点,我们必须在两个分布上分别测量人的水平误差,该算法对训练的分布数据有更好的效果。但我们不确定这是因为它被训练在数据上,或者它比开发/测试分布更容易。博主注:博主未能理解其意思,有能力的读者可以看一下英文吧。
您决定将重点放在开发集上, 并手动检查是什么原因导致的错误。下面是一个表, 总结了您的发现:
开发集总误差 14.3% 由于数据标记不正确而导致的错误 4.1% 由于雾天的图片引起的错误 8.0% 由于雨滴落在汽车前摄像头上造成的错误 2.2% 其他原因引起的错误 1.0% 在这个表格中,4.1%、8.0%这些比例是总开发集的一小部分(不仅仅是您的算法错误标记的样本),即大约8.0 / 14.3 = 56%的错误是由于雾天的图片造成的。
从这个分析的结果意味着团队最先做的应该是把更多雾天的图片纳入训练集,以便解决该类别中的8%的错误,对吗?
【
★】 错误,因为这取决于添加这些数据的容易程度以及您要考虑团队认为它会有多大帮助。【 】 是的,因为它是错误率最大的类别。正如视频中所讨论的,我们应该对错误率进行按大小排序,以避免浪费团队的时间。
【 】 是的,因为它比其他的错误类别错误率加在一起都大(8.0 > 4.1+2.2+1.0)。
【 】 错误,因为数据增强(通过清晰的图像+雾的效果合成雾天的图像)更有效。
你可以买一个专门设计的雨刮,帮助擦掉正面相机上的一些雨滴。 根据上一个问题的表格,您同意以下哪些陈述?
【
★】 对于挡风玻璃雨刷可以改善模型的性能而言,2.2%是改善的最大值。【 】对于挡风玻璃雨刷可以改善模型的性能而言,2.2%是改善最小值。
【 】 对于挡风玻璃雨刷可以改善模型的性能而言,改善的性能就是2.2%。
【 】 在最坏的情况下,2.2%将是一个合理的估计,因为挡风玻璃刮水器会损坏模型的性能。
You will probably not improve performance by more than 2.2% by solving the raindrops problem. If your dataset was infinitely big, 2.2% would be a perfect estimate of the improvement you can achieve by purchasing a specially designed windshield wiper that removes the raindrops.
一般而言,解决了雨滴的问题你的错误率可能不会完全降低2.2%,如果你的数据集是无限大的, 改善2.2% 将是一个理想的估计, 买一个雨刮是应该可以改善性能的。您决定使用数据增强来解决雾天的图像,您可以在互联网上找到1,000张雾的照片,然后拿清晰的图片和雾来合成雾天图片,如下所示:
你同意下列哪种说法?(检查所有选项)
【 】 只要你把它与一个更大(远大于1000)的清晰/不模糊的图像结合在一起,那么对雾的1000幅图片就没有太大的过拟合的风险。
【 】 将合成的看起来像真正的雾天图片添加到从你的汽车前摄像头拍摄到的图片的数据集对与改进模型不会有任何帮助,因为它会引入可避免的偏差。
【
★】 只要合成的雾对人眼来说是真实的,你就可以确信合成的数据和真实的雾天图像差不多,因为人类的视觉对于你正在解决的问题是非常准确的。
If the synthesized images look realistic, then the model will just see them as if you had added useful data to identify road signs and traffic signals in a foggy weather.
如果合成的图像看起来逼真, 就好像您在有雾的天气中添加了有用的数据来识别道路标志和交通信号一样。在进一步处理问题之后,您已决定更正开发集上错误标记的数据。 您同意以下哪些陈述? (检查所有选项)。
- 【
★】 您不应更正训练集中的错误标记的数据, 以免现在的训练集与开发集更不同。
Deep learning algorithms are quite robust to having slightly different train and dev distributions.
深度学习算法对于略有不同的训练集和开发集分布是相当强大的。(博主注:意思是小改动会造成大差异) 【 】 您应该更正训练集中的错误标记数据, 以免您现在的训练集与开发集更不同。
【 】 您不应该更正测试集中错误标记的数据,以便开发和测试集来自同一分布。
【
★】 您还应该更正测试集中错误标记的数据,以便开发和测试集来自同一分布。Because you want to make sure that your dev and test data come from the same distribution for your algorithm to make your team’s iterative development process is efficient.
因为你想确保你的开发和测试数据来自相同的分布,以使你的团队的迭代开发过程高效。
- 【
到目前为止,您的算法仅能识别红色和绿色交通灯,该公司的一位同事开始着手识别黄色交通灯(一些国家称之为橙色光而不是黄色光,我们将使用美国的黄色标准),含有黄色灯的图像非常罕见,而且她没有足够的数据来建立一个好的模型,她希望你能用转移学习帮助她。
你告诉你的同事怎么做?
【
★】 她应该尝试使用在你的数据集上预先训练过的权重,并用黄光数据集进行进一步的微调。【 】 如果她有10,000个黄光图像,从您的数据集中随机抽取10,000张图像,并将您和她的数据放在一起,这可以防止您的数据集“淹没”她的黄灯数据集。
【 】 你没办法帮助她,因为你的数据分布与她的不同,而且缺乏黄灯标签的数据。
【 】 建议她尝试多任务学习,而不是使用所有数据进行迁移学习。
You have trained your model on a huge dataset, and she has a small dataset. Although your labels are different, the parameters of your model have been trained to recognize many characteristics of road and traffic images which will be useful for her problem. This is a perfect case for transfer learning, she can start with a model with the same architecture as yours, change what is after the last hidden layer and initialize it with your trained parameters.
你已经在一个庞大的数据集上训练了你的模型,并且她有一个小数据集。 尽管您的标签不同,但您的模型参数已经过训练,可以识别道路和交通图像的许多特征,这些特征对于她的问题很有用。 这对于转移学习来说是一个完美的例子,她可以从一个与您的架构相同的模型开始,改变最后一个隐藏层之后的内容,并使用您的训练参数对其进行初始化。另一位同事想要使用放置在车外的麦克风来更好地听清你周围是否有其他车辆。 例如,如果你身后有警车,你就可以听到警笛声。 但是,他们没有太多的训练这个音频系统,你能帮忙吗?
【 】 从视觉数据集迁移学习可以帮助您的同事加快步伐,多任务学习似乎不太有希望。
【 】 从您的视觉数据集中进行多任务学习可以帮助您的同事加快步伐,迁移学习似乎不太有希望。
【 】 迁移学习或多任务学习可以帮助我们的同事加快步伐。
【
★】 迁移学习和多任务学习都不是很有希望。
The problem he is trying to solve is quite different from yours. The different dataset structures make it probably impossible to use transfer learning or multi-task learning.
他试图解决的问题与你的问题完全不同,不同的数据集结构可能无法使用迁移学习或多任务学习。要识别红色和绿色的灯光,你一直在使用这种方法:
A:将图像 输入到神经网络,并直接学习映射以预测是否存在红光(和/或)绿光 。
一个队友提出了另一种两步走的方法:
B:在这个两步法中,您首先要检测图像中的交通灯(如果有),然后确定交通信号灯中照明灯的颜色。
在这两者之间,方法B更多的是端到端的方法,因为它在输入端和输出端有不同的步骤,这种说法正确吗?
- 【 】 正确
- 【
★】 错误
(A) is an end-to-end approach as it maps directly the input (x) to the output (y).
A是一种端到端的方法,因为它直接将输入(x)映射到输出(y)。Approach A (in the question above) tends to be more promising than approach B if you have a (fill in the blank).如果你有一个 ,在上面的问题中方法A往往比B方法更有效,
- 【
★】 大训练集 - 【 】 多任务学习的问题。
- 【 】 偏差比较大的问题。
- 【 】 高贝叶斯误差的问题。
In many fields, it has been observed that end-to-end learning works better in practice, but requires a large amount of data. Without a larger amout of data , the application of End-To-End Deep Learning is futile.
在许多领域,据观察,端到端学习在实践中效果更好,但需要大量数据。 如果没有大量的数据,端到端深度学习的应用是效果比较差的。- 【

Autonomous driving (case study)
1
To help you practice strategies for machine learning, in this week we’ll present another scenario and ask how you would act. We think this “simulator” of working in a machine learning project will give a task of what leading a machine learning project could be like!
You are employed by a startup building self-driving cars. You are in charge of detecting road signs (stop sign, pedestrian crossing sign, construction ahead sign) and traffic signals (red and green lights) in images. The goal is to recognize which of these objects appear in each image. As an example, the above image contains a pedestrian crossing sign and red traffic lights
Your 100,000 labeled images are taken using the front-facing camera of your car. This is also the distribution of data you care most about doing well on. You think you might be able to get a much larger dataset off the internet, that could be helpful for training even if the distribution of internet data is not the same.
You are just getting started on this project. What is the first thing you do? Assume each of the steps below would take about an equal amount of time (a few days).
Spend a few days training a basic model and see what mistakes it makes.
Spend a few days checking what is human-level performance for these tasks so that you can get an accurate estimate of Bayes error.
Spend a few days getting the internet data, so that you understand better what data is available.
Spend a few days collecting more data using the front-facing camera of your car, to better understand how much data per unit time you can collect.
As discussed in lecture, applied ML is a highly iterative process. If you train a basic model and carry out error analysis (see what mistakes it makes) it will help point you in more promising directions.
2
Your goal is to detect road signs (stop sign, pedestrian crossing sign, construction ahead sign) and traffic signals (red and green lights) in images. The goal is to recognize which of these objects appear in each image. You plan to use a deep neural network with ReLU units in the hidden layers.
For the output layer, a softmax activation would be a good choice for the output layer because this is a multi-task learning problem. True/False?
True
False
Softmax would be a good choice if one and only one of the possibilities (stop sign, speed bump, pedestrian crossing, green light and red light) was present in each image.
3
You are carrying out error analysis and counting up what errors the algorithm makes. Which of these datasets do you think you should manually go through and carefully examine, one image at a time?
10,000 randomly chosen images
500 images on which the algorithm made a mistake
10,000 images on which the algorithm made a mistake
500 randomly chosen images
Focus on images that the algorithm got wrong. Also, 500 is enough to give you a good initial sense of the error statistics. There’s probably no need to look at 10,000, which will take a long time.
4
After working on the data for several weeks, your team ends up with the following data:
100,000 labeled images taken using the front-facing camera of your car.
900,000 labeled images of roads downloaded from the internet.
Each image’s labels precisely indicate the presence of any specific road signs and traffic signals or combinations of them. For example,
means the image contains a stop sign and a red traffic light.
Because this is a multi-task learning problem, you need to have all your y(i) vectors fully labeled. If one example is equal to
then the learning algorithm will not be able to use that example. True/False?
True
False
As seen in the lecture on multi-task learning, you can compute the cost such that it is not influenced by the fact that some entries haven’t been labeled.
5
The distribution of data you care about contains images from your car’s front-facing camera; which comes from a different distribution than the images you were able to find and download off the internet. How should you split the dataset into train/dev/test sets?
Choose the training set to be the 900,000 images from the internet along with 80,000 images from your car’s front-facing camera. The 20,000 remaining images will be split equally in dev and test sets.
Mix all the 100,000 images with the 900,000 images you found online. Shuffle everything. Split the 1,000,000 images dataset into 600,000 for the training set, 200,000 for the dev set and 200,000 for the test set.
Choose the training set to be the 900,000 images from the internet along with 20,000 images from your car’s front-facing camera. The 80,000 remaining images will be split equally in dev and test sets.
Mix all the 100,000 images with the 900,000 images you found online. Shuffle everything. Split the 1,000,000 images dataset into 980,000 for the training set, 10,000 for the dev set and 10,000 for the test set.
As seen in lecture, it is important that your dev and test set have the closest possible distribution to “real”-data. It is also important for the training set to contain enough “real”-data to avoid having a data-mismatch problem.
6
Assume you’ve finally chosen the following split between of the data:
| Dataset: | Contains: | Error of the algorithm: |
|---|---|---|
| Training | 940,000 images randomly picked from (900,000 internet images + 60,000 car’s front-facing camera images) | 8.8% |
| Training-Dev | 20,000 images randomly picked from (900,000 internet images + 60,000 car’s front-facing camera images) | 9.1% |
| Dev | 20,000 images from your car’s front-facing camera | 14.3% |
| Test | 20,000 images from the car’s front-facing camera | 14.8% |
You also know that human-level error on the road sign and traffic signals classification task is around 0.5%. Which of the following are True? (Check all that apply).
You have a large variance problem because your model is not generalizing well to data from the same training distribution but that it has never seen before.
You have a large variance problem because your training error is quite higher than the human-level error.
You have a large data-mismatch problem because your model does a lot better on the training-dev set than on the dev set
You have a large avoidable-bias problem because your training error is quite a bit higher than the human-level error.
Your algorithm overfits the dev set because the error of the dev and test sets are very close.
7
Based on table from the previous question, a friend thinks that the training data distribution is much easier than the dev/test distribution. What do you think?
Your friend is right. (I.e., Bayes error for the training data distribution is probably lower than for the dev/test distribution.)
Your friend is wrong. (I.e., Bayes error for the training data distribution is probably higher than for the dev/test distribution.)
There’s insufficient information to tell if your friend is right or wrong.
The algorithm does better on the distribution of data it trained on. But you don’t know if it’s because it trained on that no distribution or if it really is easier. To get a better sense, measure human-level error separately on both distributions.
8
You decide to focus on the dev set and check by hand what are the errors due to. Here is a table summarizing your discoveries:
| Overall dev set error | 14.3% |
|---|---|
| Errors due to incorrectly labeled data | 4.1% |
| Errors due to foggy pictures | 8.0% |
| Errors due to rain drops stuck on your car’s front-facing camera | 2.2% |
| Errors due to other causes | 1.0% |
in this table, 4.1%, 8.0%, etc.are a fraction of the total dev set (not just examples your algorithm mislabeled). I.e. about 8.0/14.3 = 56% of your errors are due to foggy pictures.
The results from this analysis implies that the team’s highest priority should be to bring more foggy pictures into the training set so as to address the 8.0% of errors in that category. True/False?
True because it is the largest category of errors. As discussed in lecture, we should prioritize the largest category of error to avoid wasting the team’s time.
True because it is greater than the other error categories added together (8.0 > 4.1+2.2+1.0).
False because this would depend on how easy it is to add this data and how much you think your team thinks it’ll help.
False because data augmentation (synthesizing foggy images by clean/non-foggy images) is more efficient.
9
You can buy a specially designed windshield wiper that help wipe off some of the raindrops on the front-facing camera. Based on the table from the previous question, which of the following statements do you agree with?
2.2% would be a reasonable estimate of the maximum amount this windshield wiper could improve performance.
2.2% would be a reasonable estimate of the minimum amount this windshield wiper could improve performance.
2.2% would be a reasonable estimate of how much this windshield wiper will improve performance.
2.2% would be a reasonable estimate of how much this windshield wiper could worsen performance in the worst case.
Yes. You will probably not improve performance by more than 2.2% by solving the raindrops problem. If your dataset was infinitely big, 2.2% would be a perfect estimate of the improvement you can achieve by purchasing a specially designed windshield wiper that removes the raindrops.
10
You decide to use data augmentation to address foggy images. You find 1,000 pictures of fog off the internet, and “add” them to clean images to synthesize foggy days, like this:
Which of the following statements do you agree with?
So long as the synthesized fog looks realistic to the human eye, you can be confident that the synthesized data is accurately capturing the distribution of real foggy images (or a subset of it), since human vision is very accurate for the problem you’re solving.
Adding synthesized images that look like real foggy pictures taken from the front-facing camera of your car to training dataset won’t help the model improve because it will introduce avoidable-bias.
There is little risk of overfitting to the 1,000 pictures of fog so long as you are combing it with a much larger (>>1,000) of clean/non-foggy images.
Yes. If the synthesized images look realistic, then the model will just see them as if you had added useful data to identify road signs and traffic signals in a foggy weather. I will very likely help.
11
After working further on the problem, you’ve decided to correct the incorrectly labeled data on the dev set. Which of these statements do you agree with? (Check all that apply).
You should also correct the incorrectly labeled data in the test set, so that the dev and test sets continue to come from the same distribution
You should correct incorrectly labeled data in the training set as well so as to avoid your training set now being even more different from your dev set.
You should not correct the incorrectly labeled data in the test set, so that the dev and test sets continue to come from the same distribution
You should not correct incorrectly labeled data in the training set as well so as to avoid your training set now being even more different from your dev set.
12
So far your algorithm only recognizes red and green traffic lights. One of your colleagues in the startup is starting to work on recognizing a yellow traffic light. (Some countries call it an orange light rather than a yellow light; we’ll use the US convention of calling it yellow.) Images containing yellow lights are quite rare, and she doesn’t have enough data to build a good model. She hopes you can help her out using transfer learning.
What do you tell your colleague?
She should try using weights pre-trained on your dataset, and fine-tuning further with the yellow-light dataset.
If she has (say) 10,000 images of yellow lights, randomly sample 10,000 images from your dataset and put your and her data together. This prevents your dataset from “swamping” the yellow lights dataset.
You cannot help her because the distribution of data you have is different from hers, and is also lacking the yellow label.
Recommend that she try multi-task learning instead of transfer learning using all the data.
Yes. You have trained your model on a huge dataset, and she has a small dataset. Although your labels are different, the parameters of your model have been trained to recognize many characteristics of road and traffic images which will be useful for her problem. This is a perfect case for transfer learning, she can start with a model with the same architecture as yours, change what is after the last hidden layer and initialize it with your trained parameters.
13
Another colleague wants to use microphones placed outside the car to better hear if there’re other vehicles around you. For example, if there is a police vehicle behind you, you would be able to hear their siren. However, they don’t have much to train this audio system. How can you help?
Transfer learning from your vision dataset could help your colleague get going faster. Multi-task learning seems significantly less promising.
Multi-task learning from your vision dataset could help your colleague get going faster. Transfer learning seems significantly less promising.
Either transfer learning or multi-task learning could help our colleague get going faster.
Neither transfer learning nor multi-task learning seems promising.
Yes. The problem he is trying to solve is quite different from yours. The different dataset structures make it probably impossible to use transfer learning or multi-task learning.
14
To recognize red and green lights, you have been using this approach:
(A) Input an image (x) to a neural network and have it directly learn a mapping to make a prediction as to whether there’s a red light and/or green light (y).
A teammate proposes a different, two-step approach:
(B) In this two-step approach, you would first (i) detect the traffic light in the image (if any), then (ii) determine the color of the illuminated lamp in the traffic light.
Between these two, Approach B is more of an end-to-end approach because it has distinct steps for the input end and the output end. True/False?
True
False
Yes. (A) is an end-to-end approach as it maps directly the input (x) to the output (y).
15
Approach A (in the question above) tends to be more promising than approach B if you have a __ (fill in the blank).
Large training set
Multi-task learning problem.
Large bias problem.
Problem with a high Bayes error.
Yes. In many fields, it has been observed that end-to-end learning works better in practice, but requires a large amount of data.