深度学习基础学习-forward&backward(数据集的处理及几种参数初始化策略)(内附python源码)
本篇博客从对数据集的处理开始到如何优化参数更新,全面覆盖BP神经网络的基础知识,以如何搭建一个BP的步骤为基本骨架进行逐个学习,主要内容包括以下几个方面:
1. 数据集的分批处理及归一化处理;
2. 参数的初始化;
3. 正则化;
4. 参数更行中的优化;
5. 学习率的优化;
6. 整个BP网络的搭建。
分步详解:
1 数据集的分批处理及归一化处理
(1)数据集的分批处理
在训练神经网络的过程中,每次迭代都需要遍历整个数据集,然后才能进行下一次迭代。当数据太大的时候,处理的速度比较慢,这时可以将整个数据集分成一个个的子集来进行处理以提高算法处理速度。这些分割出来的子集被成为 Mini-batch 。
整个数据集一次处理和采用Mini-batch处理的不同之处在于:整个数据集一次处理时,一次迭代只进行一次梯度下降; Mini-batch处理时,一次迭代可以进行Mini-batch次梯度下降。
假设共有m个样本:当 Mini-batch = 1 时,为随机梯度下降; 当 Mini-batch = m 时, 为 batch 梯度下降; 当 1 < Mini-batch < m 时,为 Mini-batch 梯度下降。 通常情况下 mini-batch 取
(如:64, 128 等)。
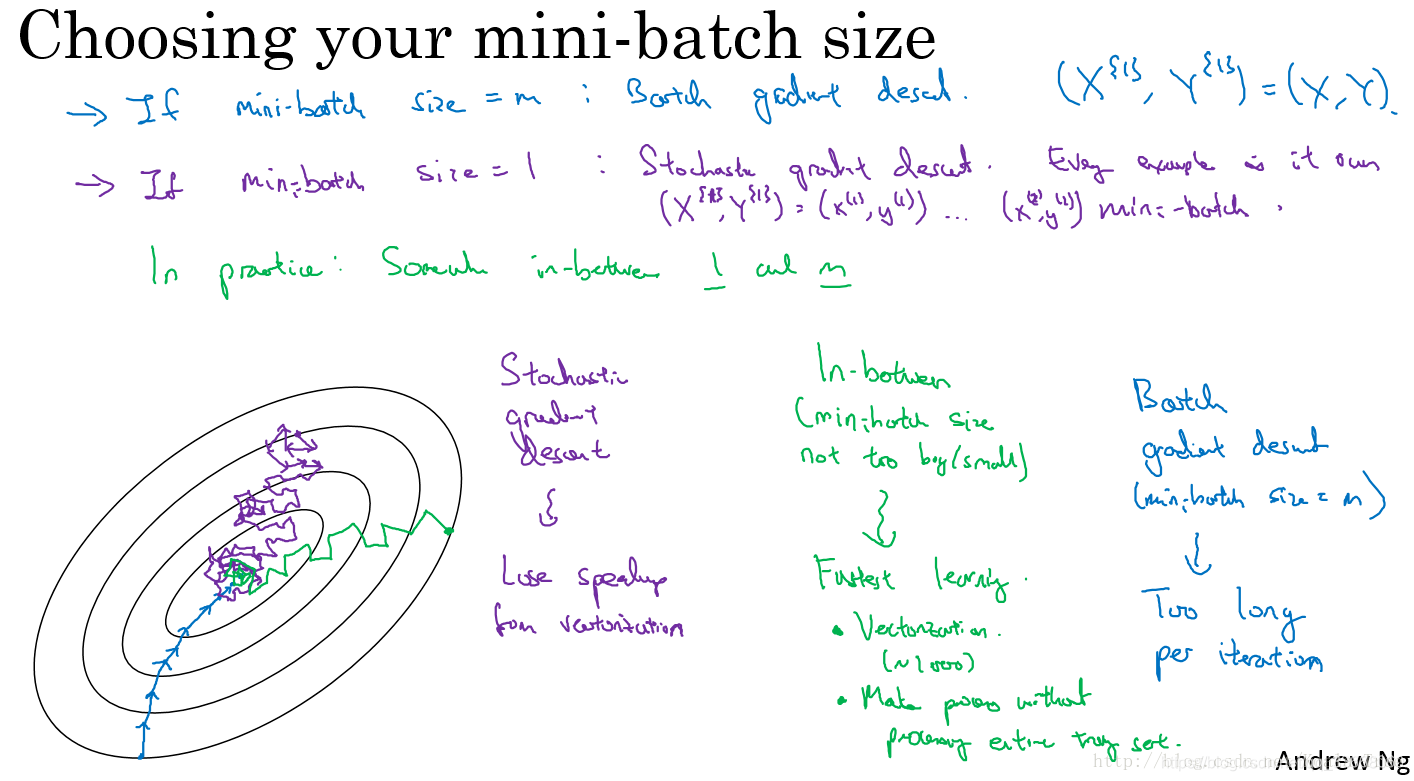 该图来自吴恩达深度学习视频教程。从中可以看出 Mini-batch 收敛速度快、波动小等优点。数据集来源:链接: https://pan.baidu.com/s/1_GY48DuWrzBnDfuGTv7Bbg 提取码: 2ksj
该图来自吴恩达深度学习视频教程。从中可以看出 Mini-batch 收敛速度快、波动小等优点。数据集来源:链接: https://pan.baidu.com/s/1_GY48DuWrzBnDfuGTv7Bbg 提取码: 2ksj
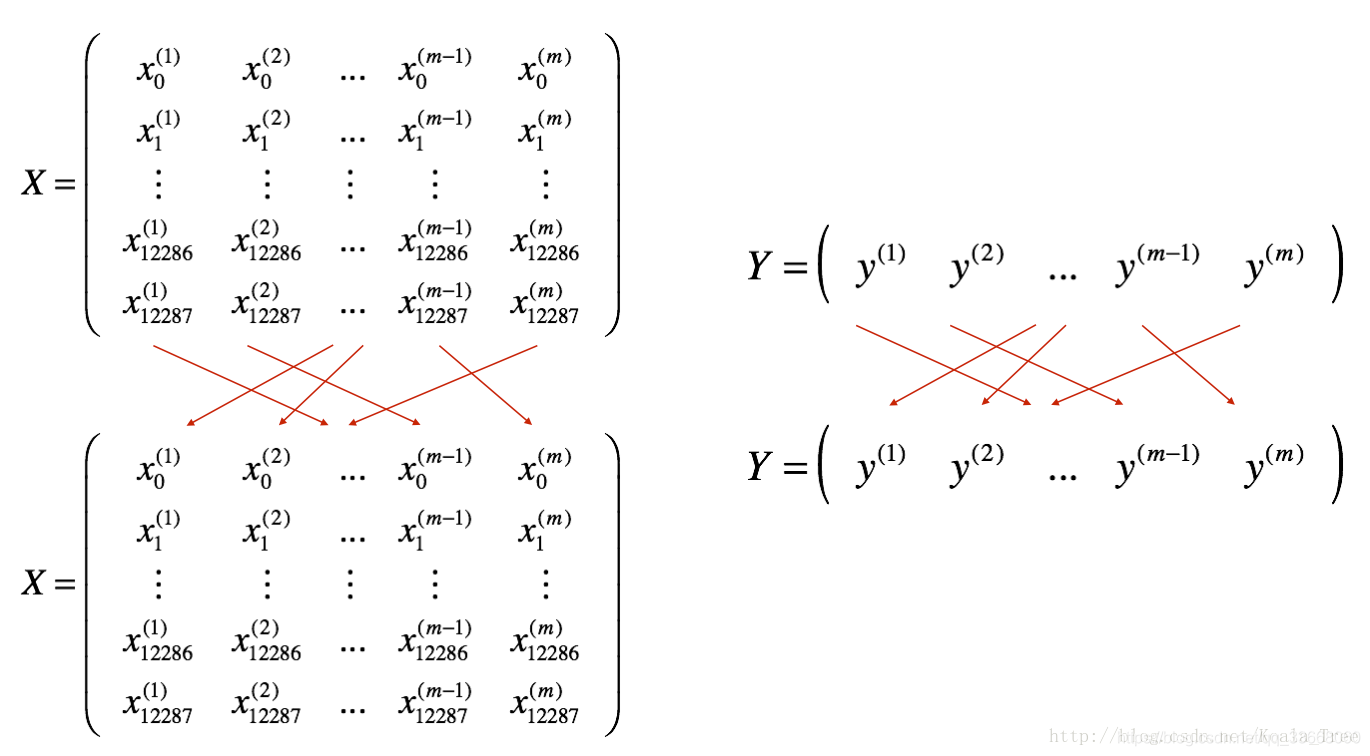
在进行 mini_batch 之前使用 np.random.permutation() 函数数据集打乱,如下图所示。下图中上层是原始数据集的顺序,下层是shuffle操作后的乱序。采用的函数是:
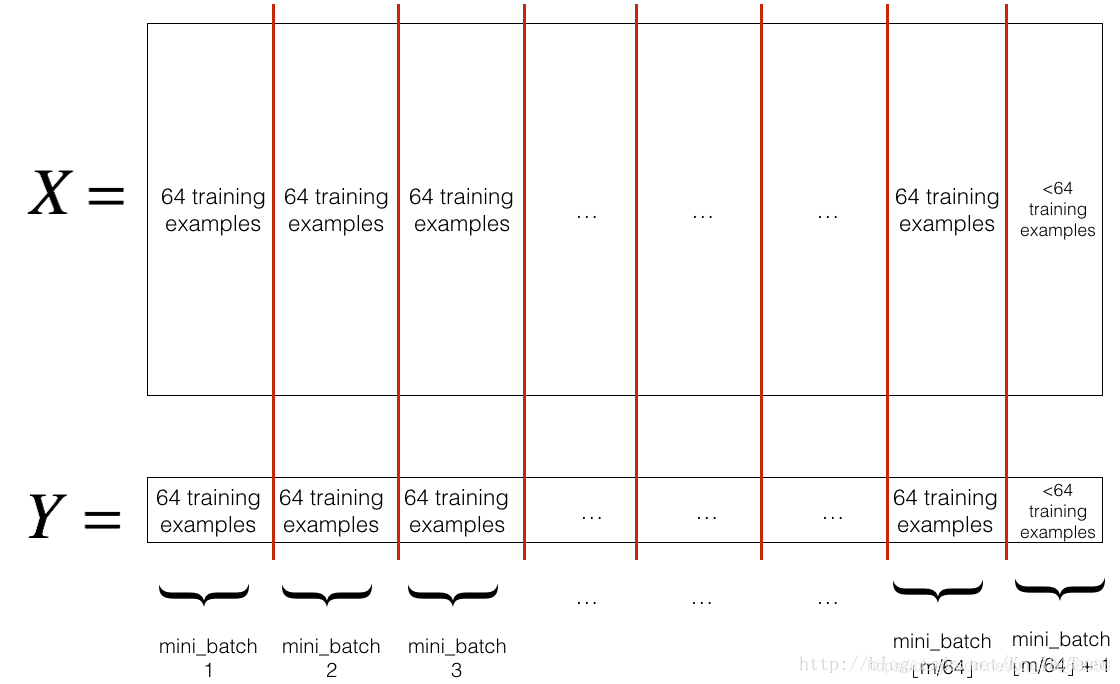
 然后利用 shuffle 操作,按照 mini_batch_size 分割整个数据集,代码形式:
然后利用 shuffle 操作,按照 mini_batch_size 分割整个数据集,代码形式:
first_mini_batch_X = shuffled_X[:, 0 : mini_batch_size]
second_mini_batch_X = shuffled_X[:, mini_batch_size : 2 * mini_batch_size]
...
...
数据集mini_batch的具体算法实现(python):
import numpy as np
import h5py
import math
# 定义数据集,,,读者下载好数据集后 需要将 此处的 train_dataset 和 test_dataset 改为自己的数据地址文件夹
def load_dataset():
train_dataset = h5py.File('/home/zwb/Logistic_Regression/train_catvnoncat.h5', "r")
train_set_x_orig = np.array(train_dataset["train_set_x"][:]) # your train set features
train_set_y_orig = np.array(train_dataset["train_set_y"][:]) # your train set labels
test_dataset = h5py.File('/home/zwb/Logistic_Regression/test_catvnoncat.h5', "r")
test_set_x_orig = np.array(test_dataset["test_set_x"][:]) # your test set features
test_set_y_orig = np.array(test_dataset["test_set_y"][:]) # your test set labels
classes = np.array(test_dataset["list_classes"][:]) # the list of classes
train_set_y_orig = train_set_y_orig.reshape((1, train_set_y_orig.shape[0]))
test_set_y_orig = test_set_y_orig.reshape((1, test_set_y_orig.shape[0]))
return train_set_x_orig, train_set_y_orig, test_set_x_orig, test_set_y_orig, classes
# 定义mini_batch函数
def random_mini_batches(X, Y, mini_batch_size=64, seed=0):
np.random.seed(seed)
m = X.shape[1]
mini_batches = []
# 利用 np.random.permutation()函数将整个数据集打乱
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1, m))
num_complete_minibatches = math.floor(m/mini_batch_size) #计算有多少个mini_batch
# 构建每个 mini_batch, 并将每一组的mini_batch 存放到 mini_batches 中
for k in range(0, num_complete_minibatches): #完整的 mini_batch
mini_batch_X = shuffled_X[:, k*mini_batch_size:(1+k)*mini_batch_size]
mini_batch_Y = shuffled_Y[:, k*mini_batch_size:(1+k)*mini_batch_size]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
if m % mini_batch_size != 0: #剩余不足64的数据
mini_batch_X = shuffled_X[:, num_complete_minibatches*mini_batch_size:m]
mini_batch_Y = shuffled_Y[:, num_complete_minibatches*mini_batch_size:m]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
return mini_batches
train_x, train_y, test_x, test_y, classes = load_dataset()
train_x = train_x.reshape(train_x.shape[0], -1).T #将每个数据学成列的形式
mini_batches = random_mini_batches(train_x, train_y, mini_batch_size=64, seed=0)
for i in range(len(mini_batches)):
print ("Shape of the {} mini_batch_X: {}" .format(i, mini_batches[i][0].shape))
print ("Shape of the {} mini_batch_Y: {}" .format(i, mini_batches[i][1].shape))
结果:
Shape of the 0 mini_batch_X: (12288, 64)
Shape of the 0 mini_batch_Y: (1, 64)
Shape of the 1 mini_batch_X: (12288, 64)
Shape of the 1 mini_batch_Y: (1, 64)
Shape of the 2 mini_batch_X: (12288, 64)
Shape of the 2 mini_batch_Y: (1, 64)
Shape of the 3 mini_batch_X: (12288, 17)
Shape of the 3 mini_batch_Y: (1, 17)
(2)数据集的归一化处理
数据集的归一化处理就是将输入数据进行归一化操作,这样做的目的是将数据集中样本的分布在同一个概率分布空间中。
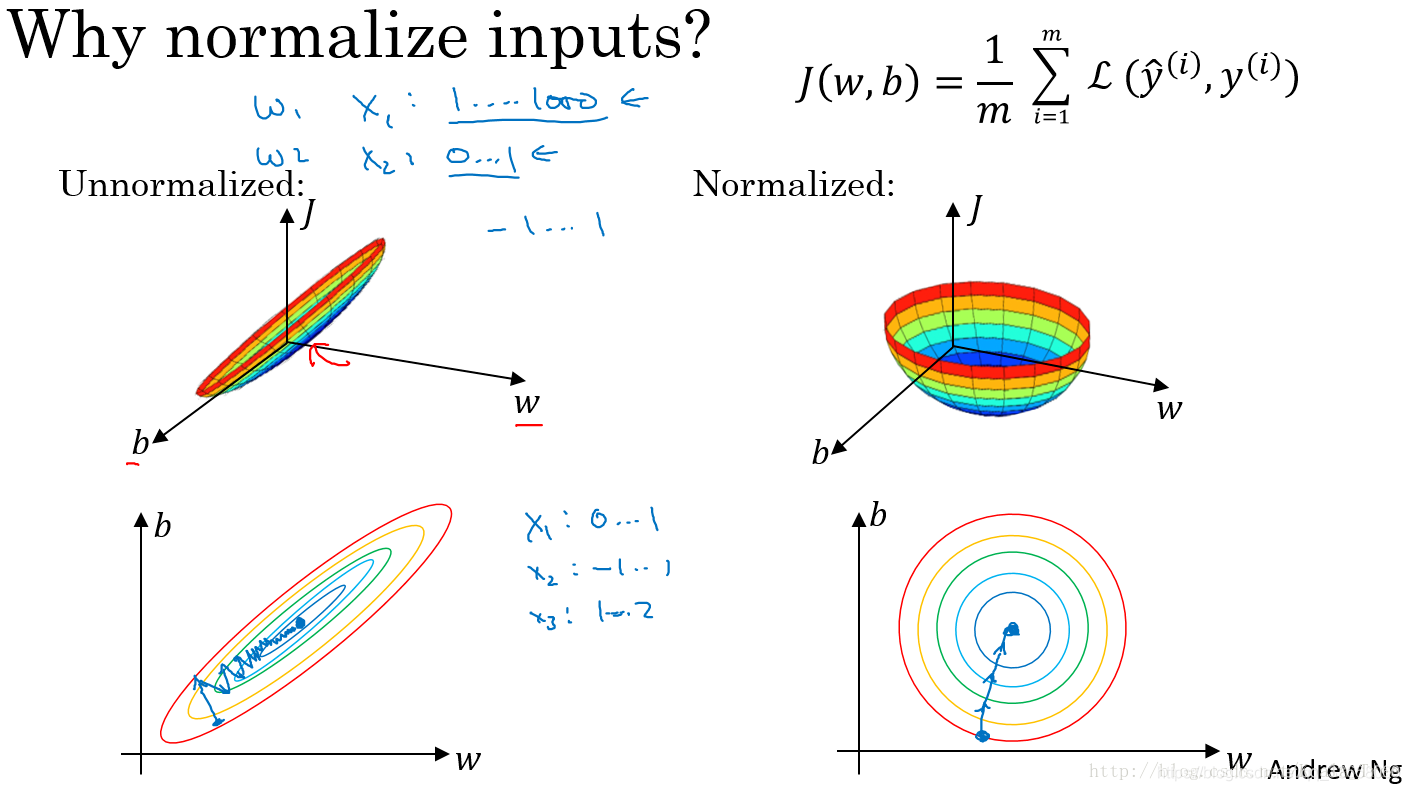 从图上可以看出,经过归一化处理后的损失函数,无论起始点在哪里都能够更快的收敛到全局最优点。
从图上可以看出,经过归一化处理后的损失函数,无论起始点在哪里都能够更快的收敛到全局最优点。
数学计算表达式:
计算每个特征所有样本数据的均值:μ=1/m ∑x(i);
减去均值得到对称的分布:x:=x−μ;
归一化方差:σ2=1/m∑x(i)^2
x=x/σ^2。
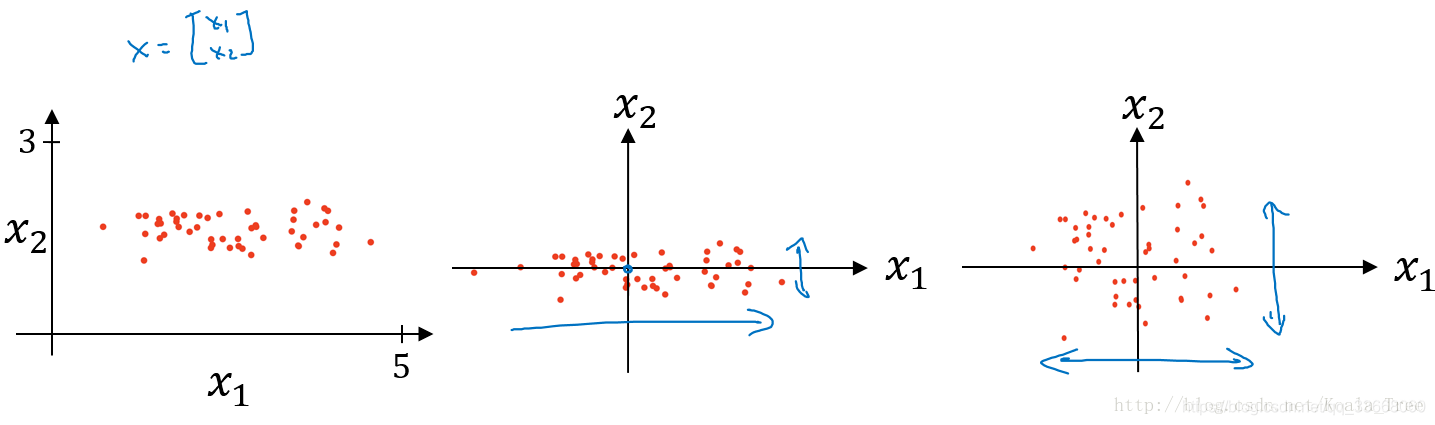 图中:左图为原始数据集分布,右是经过归一化处理后的数据集的分布, 中间是经过均值操作后的分布。
图中:左图为原始数据集分布,右是经过归一化处理后的数据集的分布, 中间是经过均值操作后的分布。
第一部分结束。。。 后续进行第二部分。。。 2020.01.14
2 参数初始化
参数的初始化能够极大的影响梯度下降的速度,比如说:如果激活函数选用 Sigmoid 或 tanh , 当 W 和 b 的值选择过大时,则 Z = WX + b 的值较大,得到的梯度趋于激活函数曲线的两端,导致每次迭代参数更新时下降梯度较小,训练过程就会变得比较缓慢; 相反, 当 W 和 b 的值选择较小时,则 Z = WX + b 的值较小,处在0附近,0点区域的梯度比较大,故参数更新较快,训练过程就会变得比较快。
此外, W 参数的值不能都为0或相同的值, 这是因为,当所有的W = 0或相同 ,整个网络就隐含层就没有意义了。
目前多采用的以下3中参数初始化策略:
随机初始化:W = np.random.randn(
,
)*0.01
He 初始化:W = np.random.randn(
,
)*sqrt(2/
) (该方法在激活函数为Relu时效果好)
Xavier 初始化: W = np.random.randn(
,
)*sqrt(1/
]) (该方法在激活函数为Sigmoid or tanh 时效果好)
这里:
代表该曾的神经元的个数;
代表上层神经元的个数;
代码实现:
def initialize_parameters_zeros(layer_dims):
parameters = {}
L = len(layer_dims)
for l in range(1, L):
parameters["W"+str(l)] = np.zeros((layer_dims[l], layer_dims[l-1]))
parameters["b"+str(l)] = np.zeros((layer_dims[l], 1))
return parameters
def initialize_parameters_random(layer_dims):
np.random.seed(3)
parameters = {}
L = len(layer_dims)
for l in range(1, L):
parameters["W"+str(l)] = np.random.randn(layer_dims[l], layer_dims[l-1])
parameters["b"+str(l)] = np.zeros((layer_dims[l], 1))
return parameters
def initialize_parameters_he(layer_dims):
np.random.seed(3)
parameters = {}
L = len(layer_dims) -1
for l in range(1, L+1):
parameters["W"+str(l)] = np.random.randn(layer_dims[l], layer_dims[l-1])*np.sqrt(2.0/layer_dims[l-1])
parameters["b"+str(l)] = np.zeros((layer_dims[l], 1))
return parameters
0初始化:
layer_dims = [2,3,2]
parameters = initialize_parameters_zeros(layer_dims)
结果:
{'b2': array([[0.],
[0.]]), 'b1': array([[0.],
[0.],
[0.]]), 'W1': array([[0., 0.],
[0., 0.],
[0., 0.]]), 'W2': array([[0., 0., 0.],
[0., 0., 0.]])}
随机初始化:
layer_dims = [2,3,2]
parameters = initialize_parameters_random(layer_dims)
结果:
{'b2': array([[0.],
[0.]]), 'b1': array([[0.],
[0.],
[0.]]), 'W1': array([[ 1.78862847, 0.43650985],
[ 0.09649747, -1.8634927 ],
[-0.2773882 , -0.35475898]]), 'W2': array([[-0.08274148, -0.62700068, -0.04381817],
[-0.47721803, -1.31386475, 0.88462238]])}
He 初始化:
parameters = initialize_parameters_he(layer_dims)
print (parameters)
结果:
{'b2': array([[0.],
[0.]]), 'b1': array([[0.],
[0.],
[0.]]), 'W1': array([[ 1.78862847, 0.43650985],
[ 0.09649747, -1.8634927 ],
[-0.2773882 , -0.35475898]]), 'W2': array([[-0.06755814, -0.51194391, -0.03577739],
[-0.38964689, -1.07276608, 0.72229115]])}
第二部分结束。。。 后续进行第三部分。。。 2020.01.15
