Vector公司的CANoe是一款强大的总线仿真工具,通过CANoe搭建出来的总线模型可以模拟真实的汽车总线,并且通过CAPL语言可以对节点上的ECU进行编程。这样不仅能够模拟总线上的报文发送,还可以模拟ECU的内部逻辑,理论上可以完全模拟出CAN总线系统。下面介绍一下如何通过CANoe搭建一个CAN网关。
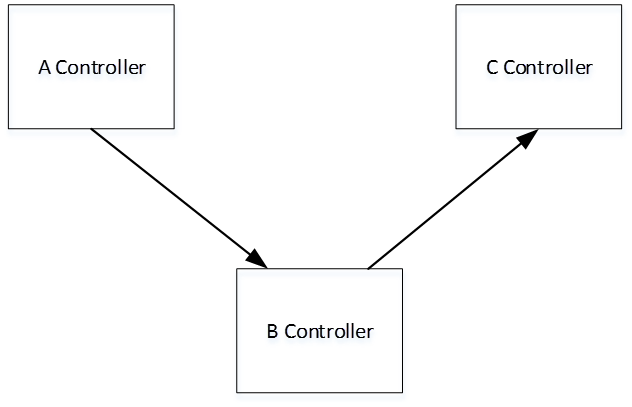
假设最简单的情况,CAN网络具有3个节点,如下所示。控制器B在接到A发送的报文后,要加以处理,然后再发送给控制器C。这里控制器A和控制器B位于CAN1网络,控制器B和控制器C位于CAN2网络,也就是说控制器B是网关。
在CANoe界面中搭建总线拓扑结构。这里的ECU2就是我们的CAN网关。
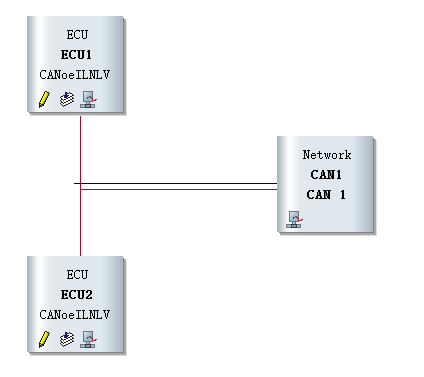
CAN1网络
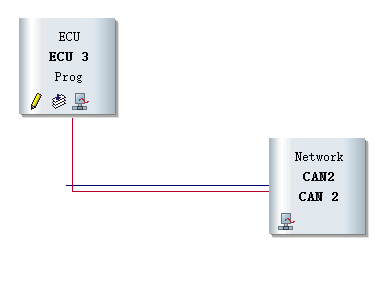
CAN2网络
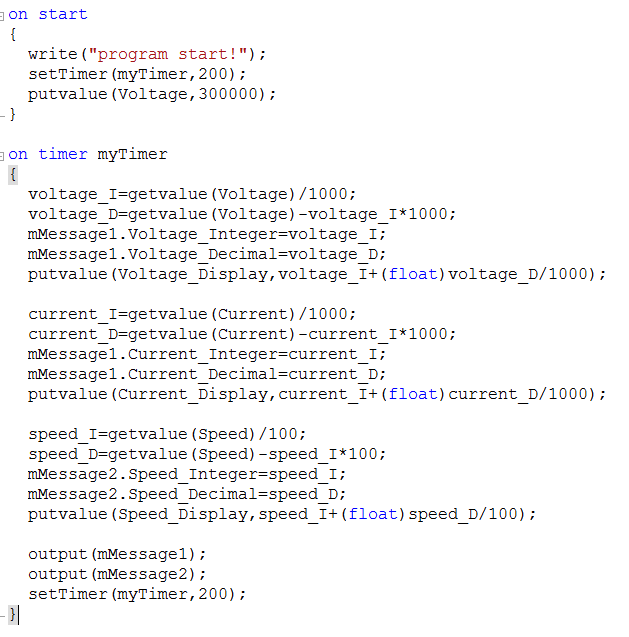
为了让ECU2能够接收到一些CAN报文,首先对ECU1进行编程,让其周期性发送报文。点击ECU1上的铅笔图标,进入编程界面,添加on start和timer事件。On start事件的目的是在ECU1开始上电时设置定时器timer和一些初始值。在timer定时器触发事件里,读取CAN dbc的报文并发送,同时再次给timer设置触发定时。如下图所示,这里从dbc里定义了两个报文,分别包含电压电流和车速信息。我设置了一个面板,用来调节这些值,一旦面板上的值有所变化,就会改变dbc中的环境变量。Timer触发中断里所要做的就是读取这些环境变量的值,更新报文内容然后发送。
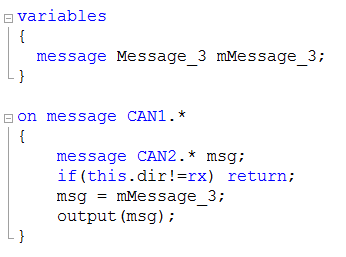
给ECU1编程好后,就要对关键的网关ECU进行编程了。这里设想最简单的方式,及ECU2对收到的报文不加以任何处理,直接发送到CAN2网络上去。代码如下,这里其实只要添加一个on message CAN1的事件,就是凡是收到CAN1消息都会触发的事件。代码所做的事情就是先判断是否是收到的消息(而不是发送的),如果是,就直接发送到CAN2通道上。CAPL的变量设置很有意思,在声明CAN报文变量时就可以指定是哪个通道,这样调用output函数时就会直接发送到该通道上。如果在声明时没有指定通道,则可以在变量的channel属性中赋值。
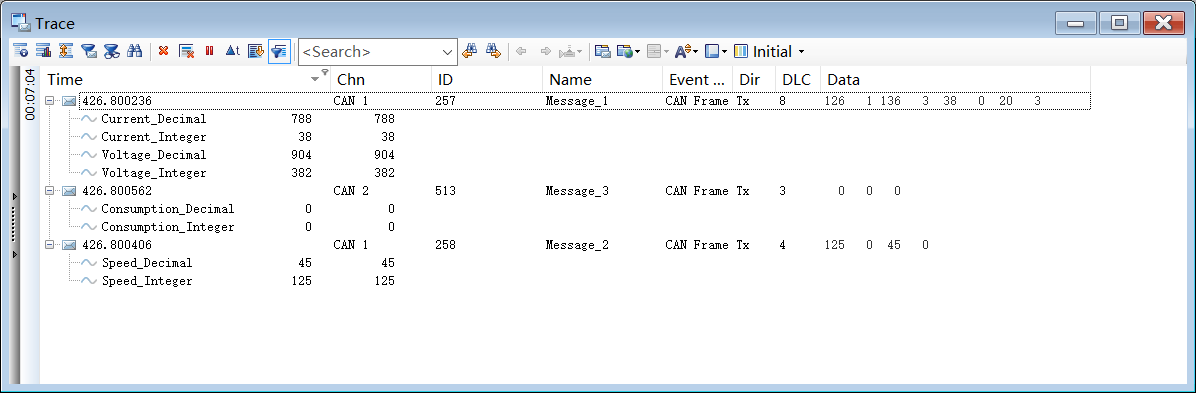
当一切设置完毕后,就是运行了。CANoe可以支持真实总线仿真,就是总线上会真实发送报文,或者模拟总线仿真,只在电脑上运行。经测试如果勾选真实总线,而总线上面没有对应的接收节点或是终端电阻,CANoe会报错。所以我们选择模拟总线仿真。运行时trace窗口截图如下。大功告成!可以看大CAN1、CAN2上都有数据,CAN2是只有ECU2从CAN1上收到数据时才会触发发送的,ECU2将ECU1发来的数据计算后,返回给ECU3一个计算结果,这样降低了ECU3的负载率。J~