优点:
- 只需要一帧数据;
- 提出一种投影误差用以评估标定精确度。
挑战: - 处理传感器标定上较大未配准问题
- 针对特定场景的最小化需求
DBR09:
利用基于激光雷达数据和单目彩色相机数据融合的3D分类器对场景的语义信息进行建模。
HLT13:
融合后的相机和激光雷达后得到的彩色点云在自动驾驶和车辆跟踪中的速度预测问题上效果较好。
NMV10,BJCK11
融合后的信息用于三维建图、3D建模
LT13
证明了边沿信息能够被相机和激光雷达鲁棒检测,本文扩展了此方法。
本文方法的有点是采用了两阶段标定方法:
1、传感器位置的大范围偏差是通过3D标志点检测进行自动标定,获取初值;
2、在标定参数的小范围子集中进行小范围密集搜索。
假定标定场景的前景和背景在相机和激光雷达坐标系中能够被轻易分开,3D点云投影到图像上的图像分割的模块后计算出来的误标定误差被计算,也就是说,自己定义了一个评价标定效果的标准,自行进行对比。
3 标定过程
3.1 标定算法介绍
假定激光雷达相对相机的平移参数比旋转参数影响更大
Step 1 粗标定
1、在相机和雷达坐标系下实现边沿检测;
2 、3D 标志点检测(包含圆心坐标和半径)
- 相机坐标下,使用YPIK90(Hough transform)的方法
- 雷达坐标系下,用本文基于RANSAC方法
3、估计两个传感器在3D空间的变换矩阵
Step 2 标定参数优化
1、用上述方法计算出来的标定参数进行初始化;
2、在标定参数的小范围扩展空间进行密集搜索
- 将检测出来的点云边沿投影到图像上
- 在图像上实现边沿检测,反向计算距离
- 交叉配对两个图像
3、基于提出来的cross correlation criteria选择较好的标定参数
3.2 传感器描述
传感器自身得到标定,
利用ROS工具提供相机内参数作为辅助工具
3.3 粗标定部分(Coarse Calibration)
3.3.1 标志点描述
标定中使用标志点(marker)的缺点在于需要从多个视角获取标志点数据,因此本文实验设置的重点是只采集一帧数据,目标边沿在两种传感器较容易被检测到。
3.3.2 点云下的检测
由于深度信息不连续,可以通过检测同一线下相邻点之间的深度差实现边沿检测。
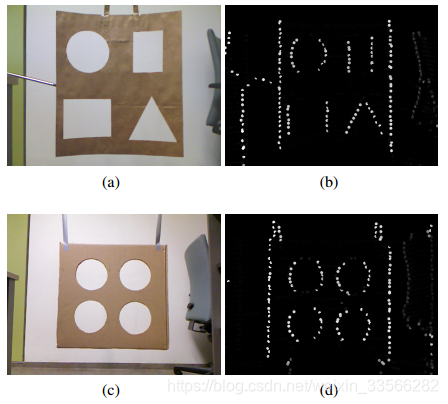
认定实际标定板上目标的尺寸,数量,位置是已知的,接下来需要进行detection, verification 和pointcloud pruning。
1、将拟合成平面的内点进行保留,外点去除,以下将对内点进行处理;
2、利用RANSAC方法针对提前给定的目标(四个圆,形成方形,半径,点距离),提取圆心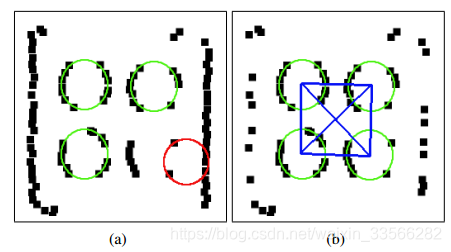
3、对检测的结果进行verification ,通过则结束,没通过则进行下一步;
4、如果提取不出来,就需要对点云进行处理,pointcloud pruning。设定规则对想提取出的点进行提取(个人感觉这个和采集的数据太有关了,鲁棒性会很好吗?)
3.3.3 相机中的检测
利用Levinson and Thrun [LT13]提供的检测器,利用Sobel算子,对边沿进行提取,再利用Hough transform提取圆形边界 [YPIK90]。
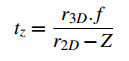
3.3.4 计算初始的平移误差
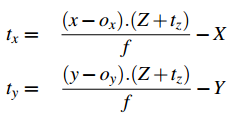
通过下式计算tz,r3D表示点云检测出的半径,r2D表示图像检测出来的半径,Z表示图像检测出的圆心的深度坐标,f表示焦距,感觉可能是我的理解有点问题,
X,Y,Z表示激光雷达下的点坐标,x,y表示图像坐标系下的坐标,ox,oy表示主点偏差
3.4 精标定部分(Fine Calibration)
在一个小参数搜索空间搜索参数的最优解
基于边缘信息设定Loss函数:
LT13方法提出了能够误标定评估方法,该方法基于的假定是相机检测到的边缘和激光雷达检测到的边缘是相互匹配的。
Step1:将激光雷达坐标系下的目标点投影到相机平面上,构建成二维的图像平面;
Step2:经过Sobel算法处理后,生成包含边缘信息的图像;
Step3:利用文LT13的Inverse Distance Transform (IDT)方法以对图像的边缘信息进行L1正则化
IDT能够针对每一个坐标为[i,j]的像素分配Dij,Dij表示边缘和距离强度Exy的估计值,(x,y)表示在(i,j)的周边。

alpha表示边沿的强度,beta增强了边缘的影响,该式增强了对图像边缘的提取程度
上式表示Loss函数的设置,IC表示处理后的图像坐标系下数据,IV表示处理投影后雷达坐标系下的数据。
3.5 优化
LT13, TN13提出的优化准则是高度非凸的,使得传统的梯度下降法失效。
4 实验结果
4.1 误标定误差
一个新颖的评估方案在本文中被提出,需要利用已知的相机内参数,结合投影的初始外参数,和图像处理后的结果。
本评估方案需要雷达的前景图,利用图像分割方法分割图像背景,提取前景,3D点被投影到分割后的图像上数量越多,误差越大。
雷达点通过Ots79文提出的距离提取方法进行前景和背景点分离,图像上的分割利用自适应的像素强度阈值进行分割(个人认为参数调整比较麻烦)。

E表示错误投影的点,P表示所有点数量,Ep表示投影误差值(怎么判断是否是误投影呢?)
未完待续。。。。。。
