指令集的设计是处理器结构中最重要的一个部分,用ARM的术语称之为ISA(Instruction Set Architecture)。所有的ARM Cortex-M 处理器均基于Thumb-2技术,在一种工作状态中允许混合使用16位和32位指令。这一点与传统的ARM处理器如ARM7TDMI不同。为了更好地理解ARM处理器中不同指令集的差异,接下来我们简单回顾一下ARM指令集的发展历史。
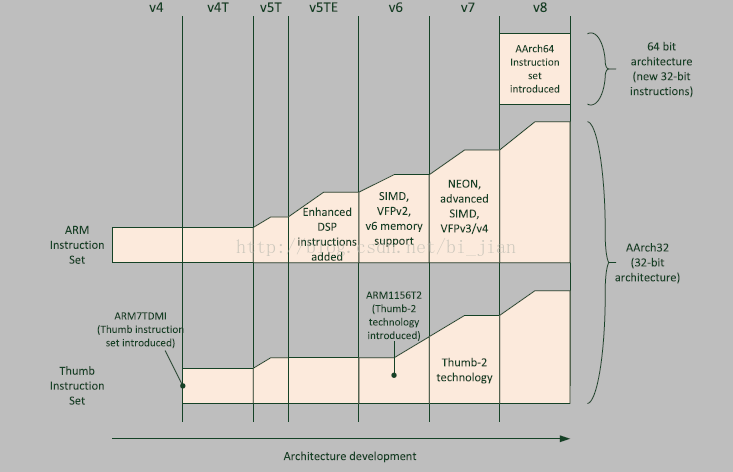
早期的ARM处理器(在ARM7TDMI处理器之前)仅支持32位ARM指令集。在接下来的数年间,ARM架构从版本1发展到版本4,ARM指令集也随之不断发展。ARM指令集功能强大,大多数指令支持条件执行,同时提供了很好的性能。但是与8位和16位架构的处理器相比,32位的ARM指令集需要更多的存储器空间。随着手机等设备对32位处理器需求的不断增加,功耗和成本都变得十分关键。如何减少程序占用空间大小的问题亟待解决。
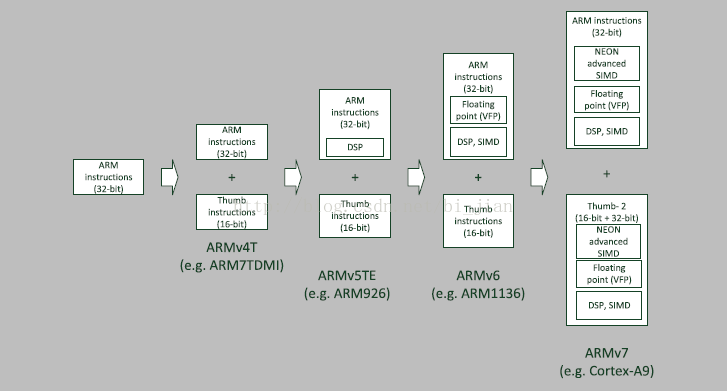
在1995年,ARM推出了ARM7TDMI处理器,开始支持一种新的工作状态,可以运行一种新的16位指令集。这种16位指令集称为Thumb指令集(Thumb即大拇指,一语双关,表明它比ARM指令集占用空间更小)。ARM7TDMI可以工作在ARM状态(默认情况下),也可以工作在Thumb状态。正常工作时,处理器可以在软件的控制下在ARM状态和Thumb状态间切换。程序的一部分利用ARM指令来编译,从而获得更高的性能,其余部分用Thumb指令编译,从而获得更高的代码密度,减少程序占用的空间。利用这种实现机制,应用程序就可以在缩紧代码大小的同时获得较高的性能。在有些情况下,Thumb代码可以比相同条件下的ARM代码减少30%的程序空间。
在ARM7TDMI处理器的设计中,利用一种映射功能可以将Thumb指令翻译成ARM指令,之后进行解码。这样只需要一个指令译码器即可。ARM和Thumb两种工作状态在新的ARM处理器中仍然支持,例如Cortex-A处理器系列及Cortex-R处理器系列。虽然Thumb指令集能够提供ARM指令集所能提供的大多数功能,但是它仍然存在一些限制。例如对可操作的寄存器,寻址模式都存在限制,用于数据或地址操作的立即数范围也有所减少。
2003年,ARM推出了Thumb-2技术,将16位指令集和32位指令集集成到一种工作状态。Thumb-2指令集是Thumb指令集的超集。许多指令是32位的,因此可以像ARM指令集一样实现相应操作,但是它与ARM指令集有不同的指令编码方式。第一个支持Thumb-2技术的处理器是ARM1156T-2处理器。
在2006年,ARM发布了Cortex-M3处理器。Cortex-M3处理器集成Thumb-2技术,仅支持Thumb工作态。与早期的ARM处理器不同,Cortex-M3处理器不支持ARM指令集。之后更多的Cortex-M处理器发布,为面向不同市场分别采用了Thumb指令集的不同指令范围。因为Cortex-M3处理器不支持ARM指令集,所以向后不能与传统的ARM处理器如ARM7TDMI兼容。换句话说,ARM7TDMI上运行的二进制镜像文件不能在Cortex-M3处理器上运行。Cortex-M3处理器(ARMv7-M)中的Thumb-2指令集是ARM7TDMI ( AR M v4T)处理器中的Thumb指令集的超集,许多ARM指令可以移植到等价的32位Thumb指令,从而使应用的移植更加方便。
ARM指令集仍在不断发展当中。2011年,ARM发布了ARMv8架构。它包含了一些新的指令集用于64位操作。当前ARMv8架构仅限于Cortex-A处理器,Cortex-M处理器暂不包含这种架构。