五、形态学运算 检测边和 角点
形态学算子检测图像中的边缘和拐角(实际用:Canny或Harris等算法)
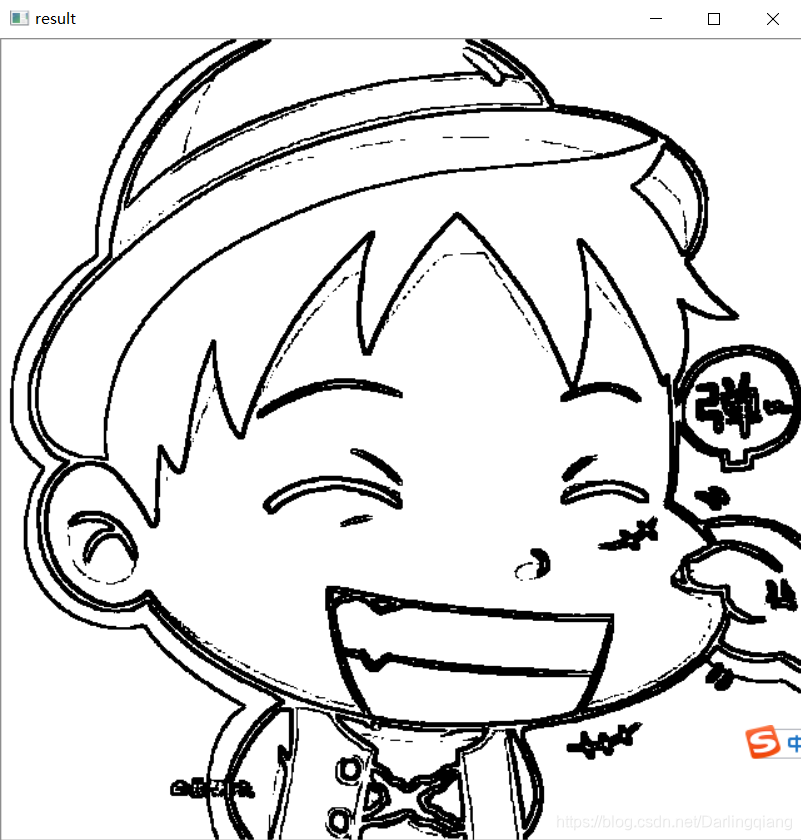
5.1 检测边缘
形态学检测边缘的原理:在膨胀时,图像中的物体会想周围“扩张”;腐蚀时,图像中的物体会“收缩”。由于这两幅图像其变化的区域只发生在边缘。所以这时将两幅图像相减,得到的就是图像中物体的边缘。
import cv2
original_img = cv2.imread('image/1.jpg',0)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
dilate_img = cv2.dilate(original_img, kernel)
erode_img = cv2.erode(original_img, kernel)
"""
我选了一张较好的图片,有的图片要去噪(高斯模糊)
将两幅图像相减获得边;cv2.absdiff参数:(膨胀后的图像,腐蚀后的图像)
上面得到的结果是灰度图,将其二值化以便观察结果
反色,对二值图每个像素取反
"""
absdiff_img = cv2.absdiff(dilate_img,erode_img);
retval, threshold_img = cv2.threshold(absdiff_img, 40, 255, cv2.THRESH_BINARY);
result = cv2.bitwise_not(threshold_img);
cv2.imshow("rlufei",original_img)
cv2.imshow("dilate_img",dilate_img)
cv2.imshow("erode_img",erode_img)
cv2.imshow("absdiff_img",absdiff_img)
cv2.imshow("threshold_img",threshold_img)
cv2.imshow("result",result)
cv2.waitKey(0)
cv2.destroyAllWindows() 

5.2检测拐角
拐角的检测的原理:先用十字形的结构元素膨胀像素,这种情况下只会在边缘处“扩张”,角点不发生变化。接着用菱形的结构元素腐蚀原图像,导致只有在拐角处才会“收缩”,而直线边缘都未发生变化。第二步是用X形膨胀原图像,角点膨胀的比边要多。这样第二次用方块腐蚀时,角点恢复原状,而边要腐蚀的更多。所以当两幅图像相减时,只保留了拐角处。
import cv2
image = cv2.imread('image/1.jpg',0)
original_image = image.copy()
#构造5×5的结构元素,分别为十字形、菱形、方形和X型
cross = cv2.getStructuringElement(cv2.MORPH_CROSS,(5, 5))
diamond = cv2.getStructuringElement(cv2.MORPH_RECT,(5, 5))
diamond[0, 0] = 0
diamond[0, 1] = 0
diamond[1, 0] = 0
diamond[4, 4] = 0
diamond[4, 3] = 0
diamond[3, 4] = 0
diamond[4, 0] = 0
diamond[4, 1] = 0
diamond[3, 0] = 0
diamond[0, 3] = 0
diamond[0, 4] = 0
diamond[1, 4] = 0
square = cv2.getStructuringElement(cv2.MORPH_RECT,(5, 5)) #构造方形结构元素
x = cv2.getStructuringElement(cv2.MORPH_CROSS,(5, 5))
dilate_cross_img = cv2.dilate(image,cross) #使用cross膨胀图像
erode_diamond_img = cv2.erode(dilate_cross_img, diamond) #使用菱形腐蚀图像
dilate_x_img = cv2.dilate(image, x) #使用X膨胀原图像
erode_square_img = cv2.erode(dilate_x_img,square) #使用方形腐蚀图像
result = cv2.absdiff(erode_square_img, erode_diamond_img) #将两幅闭运算的图像相减获得角
retval, result = cv2.threshold(result, 40, 255, cv2.THRESH_BINARY) #使用阈值获得二值图
#在原图上用半径为5的圆圈将点标出。
for j in range(result.size):
y = int(j / result.shape[0])
x = int(j % result.shape[0])
if result[x, y] == 255: #result[] 只能传入整型
cv2.circle(image,(y,x),5,(255,0,0))
cv2.imshow("original_image", original_image)
cv2.imshow("Result", image)
cv2.waitKey(0)
cv2.destroyAllWindows()

四、礼帽/顶帽,黑帽 算法
该算法可以图像识别的预处理,用于图像二值化后去除孤立点,如下图所示
import cv2
original_img = cv2.imread('image/1.jpg',0)
gray_img = cv2.resize(original_img,None,fx=0.8, fy=0.8, interpolation = cv2.INTER_CUBIC) #图形太大了缩小一点
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3)) #定义矩形结构元素(核大小为3效果好)
TOPHAT_img = cv2.morphologyEx(gray_img, cv2.MORPH_TOPHAT, kernel) #顶帽运算
BLACKHAT_img = cv2.morphologyEx(gray_img, cv2.MORPH_BLACKHAT, kernel) #黒帽运算
bitwiseXor_gray = cv2.bitwise_xor(gray_img,TOPHAT_img)
#显示如下腐蚀后的图像
cv2.imshow("gray_img", gray_img)
cv2.imshow("TOPHAT_img", TOPHAT_img)
cv2.imshow("BLACKHAT_img", BLACKHAT_img)
cv2.imshow("bitwiseXor_gray",bitwiseXor_gray)
cv2.waitKey(0)
cv2.destroyAllWindows() 



三、开运算和闭运算
开运算和闭运算就是将腐蚀和膨胀按照一定的次序进行处理。 运算不可逆,即先开后闭并不能得到原先的图像。
为了获取图像中的主要对象:对一副二值图连续使用闭运算和开运算,或者消除图像中的噪声,也可以对图像先用开运算后用闭运算,不过这样也会消除一些破碎的对象。
开运算:先腐蚀后膨胀,用于移除由图像噪音形成的斑点。
闭运算:先膨胀后腐蚀,用来连接被误分为许多小块的对象;
"""
cv2.morphologyEx(src, # 输入图片
op, # 需要处理类型的函数:(cv2.MORPH_OPEN,cv2.MORPH_CLOSE,cv2.MORPH_GRADIENT)
kernel, # 卷积核大小
dst=None,
anchor=None,
iterations=None, #迭代次数,默认1次
borderType=None,
borderValue=None)
"""
import cv2
import numpy as np
original_img = cv2.imread('original_img.png',0)
gray_res = cv2.resize(original_img,None,fx=0.8,fy=0.8,
interpolation = cv2.INTER_CUBIC) #图形太大了缩小一点
# B, G, img = cv2.split(res)
# _,RedThresh = cv2.threshold(img,160,255,cv2.THRESH_BINARY) #设定红色通道阈值160(阈值影响开闭运算效果)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3,3)) #定义矩形结构元素
closed1 = cv2.morphologyEx(gray_res, cv2.MORPH_CLOSE, kernel,iterations=1) #闭运算1
closed2 = cv2.morphologyEx(gray_res, cv2.MORPH_CLOSE, kernel,iterations=3) #闭运算2
opened1 = cv2.morphologyEx(gray_res, cv2.MORPH_OPEN, kernel,iterations=1) #开运算1
opened2 = cv2.morphologyEx(gray_res, cv2.MORPH_OPEN, kernel,iterations=3) #开运算2
gradient = cv2.morphologyEx(gray_res, cv2.MORPH_GRADIENT, kernel) #梯度
#显示如下腐蚀后的图像
cv2.imshow("gray_res", gray_res)
cv2.imshow("Close1",closed1)
cv2.imshow("Close2",closed2)
cv2.imshow("Open1", opened1)
cv2.imshow("Open2", opened2)
cv2.imshow("gradient", gradient)
cv2.waitKey(0)
cv2.destroyAllWindows()二、腐蚀和膨胀
腐蚀:腐蚀会把物体的边界腐蚀掉,卷积核沿着图象滑动,如果卷积核对应的原图的所有像素值为1,那么中心元素就保持原来的值,其余部分变为零。主要应用在去除白噪声,也可以断开连在一起的物体。
膨胀:卷积核所对应的原图像的像素值只要有一个是1,中心像素值就是1。一般在除噪是,先腐蚀再膨胀开运算,因为腐蚀在去除白噪声的时候也会使图像缩小,所以我们之后要进行膨胀。当然也可以用来将两者物体连通。
import cv2
import numpy as np
import math
import matplotlib.pyplot as plt
targetImg = cv2.imread('image/1.jpg')
kernel_4 = cv2.getStructuringElement(cv2.MORPH_RECT, (2, 2))
HSV = cv2.cvtColor(targetImg, cv2.COLOR_BGR2HSV) # 把BGR图像转换为HSV格式
Lower = np.array([0, 3, 5]) # 要识别颜色-红色的下限 ## 0 5 5 10 255 255
Upper = np.array([10, 255, 255]) # 要识别的颜色-红色的上限
# mask是把HSV图片中在颜色范围内的区域变成白色,其他区域变成黑色
mask = cv2.inRange(HSV, Lower, Upper)
erosion = cv2.erode(mask, kernel_4, iterations=1)
erosion = cv2.erode(erosion, kernel_4, iterations=1)
dilation = cv2.dilate(erosion, kernel_4, iterations=1)
dilation = cv2.dilate(dilation, kernel_4, iterations=1)
cv2.imshow("img", targetImg)
cv2.imshow("mask", mask)
cv2.imshow("target", target)
cv2.imshow("erosion", erosion)
cv2.imshow("dilation", dilation)
cv2.waitKey()
# cv2.imshow("cv_cut_img_circle", cv_cut_img_circle)
# return cropped



一、定义结构元素
形态学处理的核心就是定义结构元素,在OpenCV-Python中,可以使用其自带的getStructuringElement函数,也可以直接使用NumPy的ndarray来定义一个结构元素。
(形象图如下:)
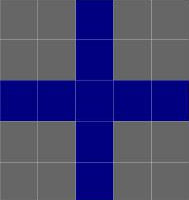
如下代码:为上图的十字形结构
当然还可以定义椭圆/矩形等:
椭圆:cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
矩形:cv2.getStructuringElement(cv2.MORPH_RECT,(5,5))
element = cv2.getStructuringElement(cv2.MORPH_CROSS,(5,5))
print("elemrnt":element )
------------------------------------------------
import numpy as np
NpKernel = np.uint8(np.zeros((5,5)))
for i in range(5):
NpKernel[2, i] = 1
NpKernel[i, 2] = 1
print("NpKernel ",NpKernel )
上述结果输出(相同):
array([[0, 0, 1, 0, 0],
[0, 0, 1, 0, 0],
[1, 1, 1, 1, 1],
[0, 0, 1, 0, 0],
[0, 0, 1, 0, 0]], dtype=uint8)参考书籍:
《opencv基础开发教程 》
参考blog:
https://blog.csdn.net/sunny2038/article/details/9137759
https://blog.csdn.net/on2way/article/details/46850813
https://blog.csdn.net/wsp_1138886114/article/details/82917661
