我的微信公众号名称:AI研究订阅号
微信公众号ID:MultiAgent1024
公众号介绍:主要研究强化学习、计算机视觉、深度学习、机器学习等相关内容,分享学习过程中的学习笔记和心得!期待您的关注,欢迎一起学习交流进步!
本文来自贺文通、何彧衡、何志强的课程设计。
电机驱动L298N模块
本次课程使用的 L298N 驱动模块,采用 ST 公司原装全新的 L298N 芯片,采用 SMT 工艺稳定性高。采用高质量电解电容,使电路稳定工作;提供二极管防反接保护电路,可以有效的防止电源反接。L298N 电机驱动模块可以直接驱动两路 3-16V 直流电机,并提供了 5V 出接口(输入最低只要 6V),可以给5V 树莓派3B系统供电 (低纹波系数),从而可以方便的控制直流电机速度和方向。其电路原理图如图7所示,具体实物如图8所示。


产品参数:
- 驱动芯片:L298N 双H 桥直流电机驱动芯片。
- 驱动部分端子供电范围Vs:+5V~+12V ;如需要板内取电,则供电范围 Vs:+6V~+12V。
- 驱动部分峰值电流 Io:2A。
- 逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)。
- 逻辑部分工作电流范围:0~36mA。
- 控制信号输入电压范围(IN1 IN2 IN3 IN4):
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss。 - 使能信号输入电压范围(ENA ENB):
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)。 - 最大功耗:20W(温度 T=75℃时)。
- 存储温度:-25℃~+130℃。
- 驱动板尺寸:52mm45mm33mm(带固定铜柱和散热片高度)。
- 其他扩展:控制方向指示灯、逻辑部分板内取电接口。
该驱动板可驱动2路直流电机,使能端ENA、ENB为高电平时有效,控制方式及直流电机状态表2如下所示:

摄像头模块
相比较USB网络摄像头而言,软件使用RPi GPU,视频对CPU使用率的影响很小。突出的分辨率(高于大多数USB网络摄像头)和优秀的日间图像质量。而传统的USB网络摄像头通常具有慢速,低帧率、CPU使用率较高,且其RPi没有足够的CPU能力来处理更高的帧速率、分辨率或高级视频压缩等缺点。故本次系统采用的是CSI接口摄像头。

CSI接口型的摄像头配置方法:
- 硬件连接
把摄像头的排线插入到网口和 HDMI 口之间的排线插槽,银色亮面朝向 HDMI 口。需要先把树莓派板载的排线插槽的扣子拨开,才能插入排线。排线需要紧密插入排线插槽,同时应注意避免排线折弯。排线插入之后,需要把插槽的扣子重新扣上。 - 使能摄像头
I、进入 Raspbian 系统终端,执行系统更新:
II、使用 raspi-config 配置摄头。
III、启用树莓派摄像头:
IV、重启系统。
经过上述步骤后,摄像头即可正常使用,为方便采集图像,采用固定架的形式将摄像头进行固定,防止车体的震动引起系统产生不必要的采集数据误差。
红外避障模块
在避障模块的选择上,我们选用了红外避障模块,与超声波模块相比而言,红外避障模块价格更加低廉,经济实惠,且可以满足本次系统避障功能的需求。该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接 收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合,该红外避障模块实物图如图10所示。

红外避障模块参数说明:
- 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
- 传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
- 传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO
- 比较器采用LM393,工作稳定;
- 可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;
- 具有3mm的螺丝孔,便于固定、安装;
- 电路板尺寸:3.2CM*1.4CM
- 每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
LED灯模块
在本系统的检测路口红绿黄灯的检测结果环节中,我们选用了LED灯模块,它能够更加直观清晰地显示出系统识别结果。此外,该LED灯模块为5V供电,为共阴极,其红绿黄颜色效果可单独控制,并且具有响应速度块、坚固耐用、高效稳定、体积小巧、简单安装、循环利用、色彩醒目、使用寿命长等特点,LED灯模块实物图如图11所示。
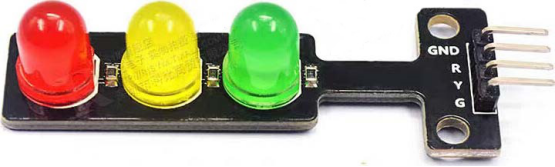
其具体产品参数表,如表1所示:

蜂鸣器模块
为了实现系统检测到后方有车辆时,能够发出警告,我们选用有源蜂鸣器模块,该有源蜂鸣器模块为3线制,其VCC引脚外接3.3V-5V电压(可以直接与5v单片机或者与3.3v单片机相连),GND引脚外接GND,I/0引脚外接单片机I0口,在本系统中,当与蜂鸣器IO引脚相连的树莓派的引脚变为高电平时,此时,触发蜂鸣器,发出滴滴滴响声,以示警告,有源蜂鸣器模块实物图如图9所示。

此外,该有源蜂鸣器模块采用S8050三极管驱动,具有以下特点:
- 模块采用S8050三极管驱动
- 工作电压3.3V-5V
- 设有固定螺栓孔,方便安装
- 小板PCB尺寸:3.2cm*1.3cm
- 当1/0口输入高电平时,蜂鸣器发声
