写在前面:
本文章旨在总结备份、方便以后查询,由于是个人总结,如有不对,欢迎指正;另外,内容大部分来自网络、书籍、和各类手册,如若侵权请告知,马上删帖致歉。
这篇来分析一下 Uart的实现方法以及添加自己的用户代码
首先我们来看看官方已经写好的串口程序,在 uart.c文件里面,而初始化 Uart是在 uart_init_new(void)函数里面,然后我们进入里面分析一下
void uart_init_new(void)
{
UART_WaitTxFifoEmpty(UART0);
UART_WaitTxFifoEmpty(UART1);
UART_ConfigTypeDef uart0_config, uart1_config;
// uart0_config.baud_rate = 100000; // 波特率
uart0_config.baud_rate = BIT_RATE_115200;
uart0_config.data_bits = UART_WordLength_8b; // 数据位 8位
uart0_config.parity = USART_Parity_None; // 奇偶校验,无
uart0_config.stop_bits = USART_StopBits_1; // 一个停止位
uart0_config.flow_ctrl = USART_HardwareFlowControl_None; // 硬件流控制,就是两个串口芯片的CTS_RTS引脚相连接控制收发
uart0_config.UART_RxFlowThresh = 120;
uart0_config.UART_InverseMask = UART_None_Inverse;
UART_ParamConfig(UART0, &uart0_config);
// uart1_config.baud_rate = 100000;
uart1_config.baud_rate = BIT_RATE_115200;
uart1_config.data_bits = UART_WordLength_8b;
uart1_config.parity = USART_Parity_None;
uart1_config.stop_bits = USART_StopBits_1;
uart1_config.flow_ctrl = USART_HardwareFlowControl_None;
uart1_config.UART_RxFlowThresh = 120;
uart1_config.UART_InverseMask = UART_None_Inverse;
UART_ParamConfig(UART1, &uart1_config);
UART_IntrConfTypeDef uart_intr;
// uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA | UART_FRM_ERR_INT_ENA | UART_RXFIFO_FULL_INT_ENA | UART_TXFIFO_EMPTY_INT_ENA;
uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA | UART_FRM_ERR_INT_ENA | UART_TXFIFO_EMPTY_INT_ENA;
uart_intr.UART_RX_FifoFullIntrThresh = 10; // 设置接收 FIFO数据满时的中断阈值
uart_intr.UART_RX_TimeOutIntrThresh = 2; // 配置进入空闲中断的传输时间,此处表示停止传输的时间超过两个字符则触发该中断
uart_intr.UART_TX_FifoEmptyIntrThresh = 20; // 表示发送 FIFO里面的数据个数少于 20个进入中断
UART_IntrConfig(UART0, &uart_intr);
UART_SetPrintPort(UART0); // 选择串口打印端口
UART_intr_handler_register(uart0_rx_intr_handler,NULL); // uart0接收中断
ETS_UART_INTR_ENABLE(); // 使能 uart中断
/*
UART_SetWordLength(UART0,UART_WordLength_8b);
UART_SetStopBits(UART0,USART_StopBits_1);
UART_SetParity(UART0,USART_Parity_None);
UART_SetBaudrate(UART0,74880);
UART_SetFlowCtrl(UART0,USART_HardwareFlowControl_None,0);
*/
}
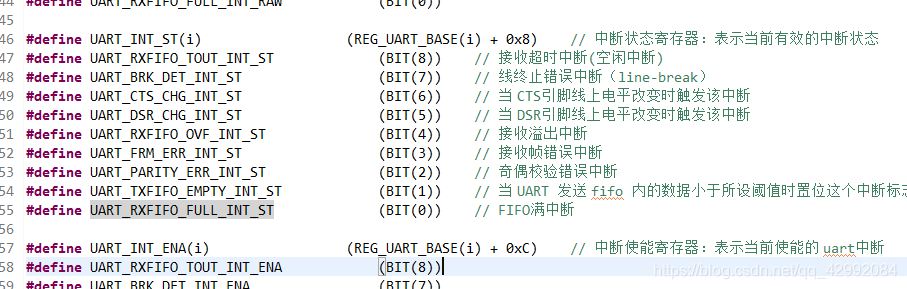
这里我稍微改了下,把 uart_config这个结构体拆分成两个,这样比较好区分,还有就是对应中断使能的宏解释如下
到这里,串口的初始化大致就这样,然后再看看中断函数处理部分
/* 串口接收数据中断函数 */
LOCAL void uart0_rx_intr_handler(void *para)
{
/* uart0 and uart1 intr combine togther, when interrupt occur, see reg 0x3ff20020, bit2, bit0 represents
* uart1 and uart0 respectively
*/
uint8 RcvChar;
uint8 uart_no = UART0;//UartDev.buff_uart_no;
uint8 fifo_len = 0;
uint8 buf_idx = 0;
uint8 temp = 0;
// uint8 fifo_tmp[128] = {0}; // 只是告诉我们这个单片机的内部 FIFO是 128字节大小
uint32 uart_intr_status = READ_PERI_REG(UART_INT_ST(uart_no)) ; //读取中断状态
portBASE_TYPE xHigherPriorityTaskWoken;
UART_Buf_Type uart_receive_data;
memset((char*)&uart_receive_data, 0, sizeof(UART_Buf_Type));
while (uart_intr_status != 0x0) {
/* 接收帧错误中断,,,可能是数据位数不对,或者接收到的数据不满8bit...等等 */
if (UART_FRM_ERR_INT_ST == (uart_intr_status & UART_FRM_ERR_INT_ST)) {
//printf("FRM_ERR\r\n");
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_FRM_ERR_INT_CLR); // 清除中断寄存器的 帧错误位
}
/* 进入 FIFO满中断 */
else if (UART_RXFIFO_FULL_INT_ST == (uart_intr_status & UART_RXFIFO_FULL_INT_ST)) {
//printf("full\r\n");
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT; // 读出来内部 FIFO缓存的数据个数
buf_idx = 0;
while (buf_idx < fifo_len) {
uart_tx_one_char(UART0, READ_PERI_REG(UART_FIFO(UART0)) & 0xFF); // 把数据通过串口 0输出
buf_idx++;
}
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR); // 清除满中断
}
/* 空闲中断,证明接受到了一条完整的数据 */
else if (UART_RXFIFO_TOUT_INT_ST == (uart_intr_status & UART_RXFIFO_TOUT_INT_ST)) {
//printf("tout\r\n");
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)&UART_RXFIFO_CNT; // 读出来接收的数据个数
buf_idx = 0;
while (buf_idx < fifo_len) {
temp = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF; // 读取数据
if(uart_receive_data.len + buf_idx < USER_UART_MAX)
{
uart_receive_data.buf[uart_receive_data.len + buf_idx] = temp;
}
uart_tx_one_char(UART1, temp); // 把数据通过串口 1输出
buf_idx++;
}
uart_receive_data.len += fifo_len;
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_TOUT_INT_CLR); // 清除空闲标志位
/* 发送队列 */
xQueueSendFromISR(xQueueCusUart, (void *)&uart_receive_data, &xHigherPriorityTaskWoken);
portEND_SWITCHING_ISR(xHigherPriorityTaskWoken);
}
/* 发送 FIFO里面的数据个数少于 20个,进入中断 */
else if (UART_TXFIFO_EMPTY_INT_ST == (uart_intr_status & UART_TXFIFO_EMPTY_INT_ST)) {
//printf("empty\n\r");
WRITE_PERI_REG(UART_INT_CLR(uart_no), UART_TXFIFO_EMPTY_INT_CLR); // 清除中断
CLEAR_PERI_REG_MASK(UART_INT_ENA(UART0), UART_TXFIFO_EMPTY_INT_ENA); // 清除中断标志
} else {
//skip
}
uart_intr_status = READ_PERI_REG(UART_INT_ST(uart_no)) ;
}
}接下来,再分析一下一些有用到的程序
/* 这个用于单字节打印,你可以加个循环用来做成字符串打印 */
LOCAL STATUS uart_tx_one_char(uint8 uart, uint8 TxChar)
{
while (true) {
// 首先要明确,只要发送FIFO里面有数据,串口就会不断的从 FIFO里面取数据然后发出去
uint32 fifo_cnt = READ_PERI_REG(UART_STATUS(uart)) & (UART_TXFIFO_CNT << UART_TXFIFO_CNT_S);
// 如果 FIFO里面 >= 126,就会一直在 while循环,实际上内部串口也在不停的从 FIFO取出来数据,然后发出去
if ((fifo_cnt >> UART_TXFIFO_CNT_S & UART_TXFIFO_CNT) < 126) {
break;
}
}
WRITE_PERI_REG(UART_FIFO(uart) , TxChar); // 写一个字节到串口的FIFO
return OK;
}
/* 这个就不用多说了,用来转换打印串口 */
void UART_SetPrintPort(UART_Port uart_no)
{
if (uart_no == 1) {
os_install_putc1(uart1_write_char); // 选用 USART1打印
} else {
os_install_putc1(uart0_write_char); // 选用 USART0打印
}
}好了,分析完官方内嵌的程序后,我们自己去定义,封装一些需要用到函数,因为是 RTOS开发,自然要引用操作系统啦,不多说,代码如下,说明看注释
/*
* bsp_uart.c
*
* Created on: 2019年9月7日
* Author: liziyuan
*/
#include "esp_common.h"
#include "bsp_uart.h"
xQueueHandle xQueueCusUart;
xQueueHandle xQueueXmodem;
/******************************************************************************
* FunctionName : uart0_send_data
* Description : uart 0数据发送
* Parameters : Buf ---- 数据
* Len ---- 长度
* Returns : none
*******************************************************************************/
void ICACHE_FLASH_ATTR uart0_send_data(uint8 *Buf, uint32 Len)
{
uint32 i;
for(i = 0;i < Len;i++)
{
WRITE_PERI_REG(UART_FIFO(UART0) , *(Buf + i)); // 写一个字节到串口 0的FIFO
}
}
/******************************************************************************
* FunctionName : uart_receive
* Description : uart数据接收处理
* Parameters : Buf ---- 数据
* Len ---- 长度
* Returns : none
*******************************************************************************/
LOCAL void ICACHE_FLASH_ATTR uart_receive(uint8 *Buf, uint32 Len)
{
uart0_send_data(Buf, Len); // 自收发测试,你可以在这里添加你需要执行的程序
}
/******************************************************************************
* FunctionName : uart_task
* Description : uart处理任务
* Parameters : pvParameters
* Returns : none
*******************************************************************************/
LOCAL void ICACHE_FLASH_ATTR uart_task(void *pvParameters)
{
UART_Buf_Type Uart0_data;
while(1)
{
if(xQueueReceive(xQueueCusUart, (void *)&Uart0_data, (portTickType)500/*portMAX_DELAY*/)) // wait about 5sec
{
if(Uart0_data.len > 0)
{
uart_receive(Uart0_data.buf, Uart0_data.len);
}
}
// vTaskDelay(50 / portTICK_RATE_MS); // 50 ms
}
vTaskDelete(NULL);
}
/******************************************************************************
* FunctionName : user_Uart_Init
* Description : 串口初始化
* Parameters : none
* Returns : none
*******************************************************************************/
void ICACHE_FLASH_ATTR user_Uart_Init(void)
{
xQueueCusUart = xQueueCreate((unsigned portBASE_TYPE)UART0_QUEUE_LENGTH, sizeof(UART_Buf_Type)); // 目标队列的句柄
// xQueueXmodem = xQueueCreate((unsigned portBASE_TYPE)(1), sizeof(UART_Buf_Type));
uart_init_new(); // config uart0 connection device MCU, config uart1 TX debug output
xTaskCreate(uart_task, "uart_task", 256, NULL, tskIDLE_PRIORITY + 4, NULL); // 串口处理任务
}
/*------------------------------- END OF FILE -------------------------------*/
/*
* bsp_uart.h
*
* Created on: 2019年9月7日
* Author: liziyuan
*/
#ifndef __BSP_UART_H
#define __BSP_UART_H
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/queue.h"
#include "../../../include/uart.h"
#define UART0_QUEUE_LENGTH 3
#define USER_UART_MAX 50
typedef struct
{
uint16 len;
uint8 buf[USER_UART_MAX];
}UART_Buf_Type;
extern xQueueHandle xQueueCusUart;
extern xQueueHandle xQueueXmodem;
void ICACHE_FLASH_ATTR user_Uart_Init(void);
#endif /* __BSP_UART_H */
/*------------------------------- END OF FILE -------------------------------*/
最后,当时在学习串口时参考的链接:https://www.cnblogs.com/yangfengwu/p/11080567.html
